一种新型防风固沙植物种子喷播车的设计
2022-08-01仰钧毅徐论孙康夏普松邓财罗子涵卢学玉
仰钧毅,徐论,孙康,夏普松,邓财,罗子涵,卢学玉
一种新型防风固沙植物种子喷播车的设计
仰钧毅,徐论,孙康,夏普松,邓财,罗子涵,卢学玉
(江南大学 机械工程学院,江苏 无锡 214122)
针对土地荒漠化治理、公路护坡、矿山恢复的需求,采用植物种子播种的方式进行防风固沙和植被恢复。本文设计一种新型防风固沙植物种子喷播车,该装置主要由行进越障机构、控制机构、喷播机构、丝杠平台机构、机电控制机构和物料存储机构等组成,其中喷播机构使用文丘里管喷射,行进越障机构自主设计了特殊的偏心连杆机构来更好地越障。通过三维软件进行模型设计,并结合多次实验验证分析,证明该装置设计方案可行。
喷播车;文丘里管;喷播平台;机电控制
目前,植被恢复、防风固沙成为了环境保护的重要任务之一,护坡草籽因价格低廉、生长周期较短、对环境要求不高等优点得到广泛使用。本文设计了一种新型防风固沙植物种子喷播车,具有多种环境的适用性,并克服了传统喷播机体积庞大、装置笨重、价格昂贵、自动化程度低的弊端。
1 喷播车方案设计
1.1 装配图与工作流程
如图1所示,新型防风固沙植物种子喷播车主要由越障行进机构[1]、喷播机构、丝杠平台机构、机电控制机构和物料存储机构等组成。该喷播车可通过机构完成两种模式喷播,包括对地面的覆盖式喷播和对斜坡的攒射式喷播。

图1 喷播车结构示意图
越障行进机构由前铰接车架、后固定车架、电机和越障车轮组成,当遇到障碍物时,前铰接车架抬起,就可平稳越过较高障碍物。控制机构选用BODVISION智能云台摄像机通过手机进行远程监控。喷播机构由机械臂、管道、喷头组成,机械臂运动带动喷头上下和旋转,进行多角度喷播。丝杠平台机构由两根丝杠、两根光杆和两个电机组成,可使机械臂停留在二维平面内的任意位置,实现喷播的多自由度。物料存储机构由水箱、水泵、文丘里管、种子营养液存储箱组成,水泵与文丘里管安置在车体尾部,距离机械臂较近,保证喷播的射程。
该喷播车的工作流程如图2所示,通过摄像头远程监控,喷播车行进越障至指定位置,进而机械臂与丝杠平台配合,使喷头对准需喷播位置,然后水泵启动,水流经过文丘里管使得种子、营养液与水混合,最后由万向鸭嘴喷头实现地面覆盖式喷播,或者经增压式喷头进行斜坡攒射式喷播。
1.2 越障行进机构
如图3所示,该越障行进机构由铝合金板、亚克力板、对锁螺钉、轴套、轴承等为主要框架构成。车架与底座连接采用符合GB/T 9074.13-1988[2]的M10×40对锁螺钉,采用10×14×20轴套使车架外延。前铰接车架宽270 mm,后固定车架宽400 mm,前后车架均高150 mm,采用4 mm厚铝合金板与2 mm亚克力板制成。
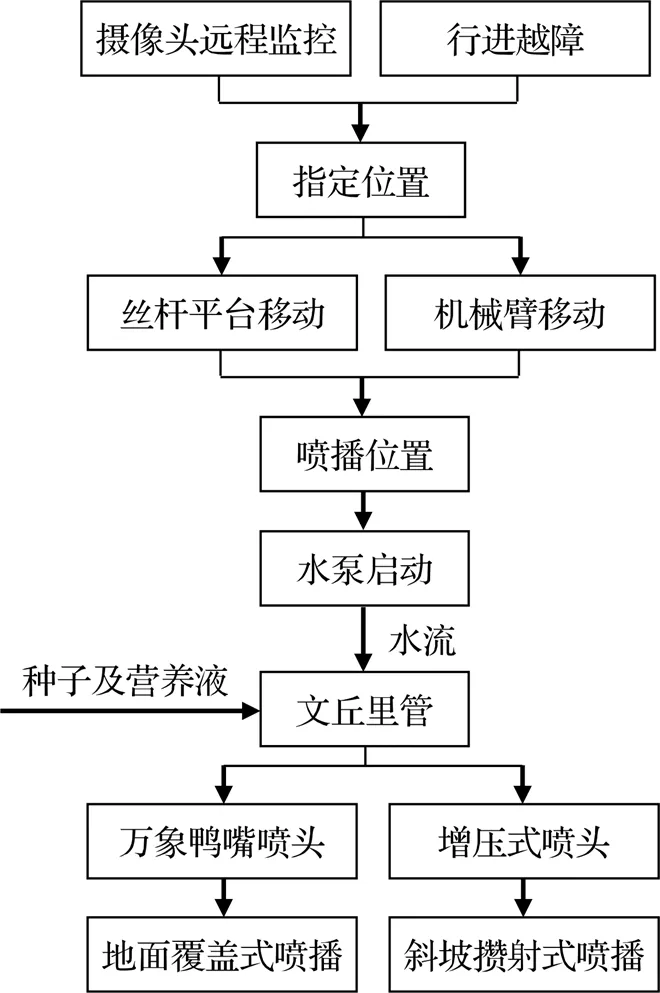
图2 工作流程图
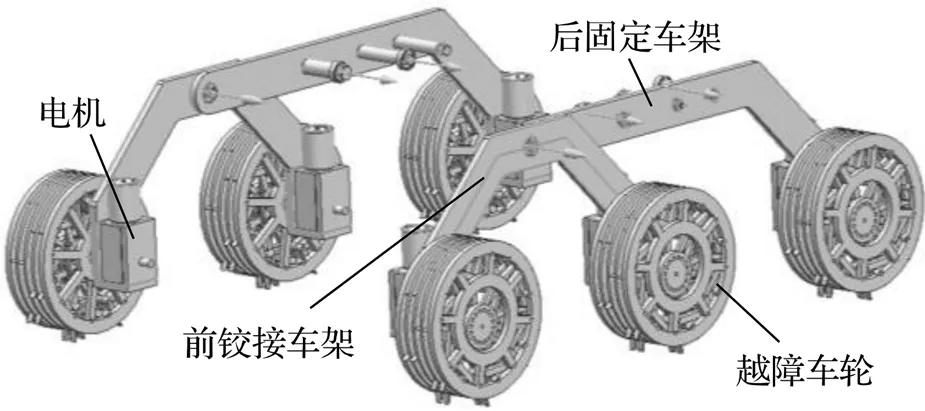
图3 越障行进机构
越障车轮如图4所示,偏心轮在运动过程通过偏心轮轴孔与偏心轮轴固定保持不动,多个外轮在连接定位孔处通过犁爪轴向定位,使用M4×39的对锁螺丝进行轴向固定并进行传力,通过外轮轴孔与电机轴连接,按图4(b)所示方向转动,进而带动多个外轮转动。外轮带动犁爪和连杆使偏心轮连杆绕偏心轮转动,此时偏心轮的远端始终向下,保证犁爪在最下端伸出,以便在恶劣环境中进行越障,铰接处均采用了压铆螺柱与平头螺栓(在适当位置增加垫片保证间隙)。当在平稳环境中行驶时,偏心轮轴转动180°,使偏心轮远端朝上,地面接触端的犁爪收回轮子内部,此时越障车轮相当于普通车轮,可在平稳地面正常行驶。
由偏心轮连杆、外轮和犁爪组成的连杆机构的自由度为:
=3-(2P+P) (1)
式中:为连杆个数;P为低副;P为高副。
该机构中:=3,P=4,P=0。
计算得:=1
故该连杆机构合理。
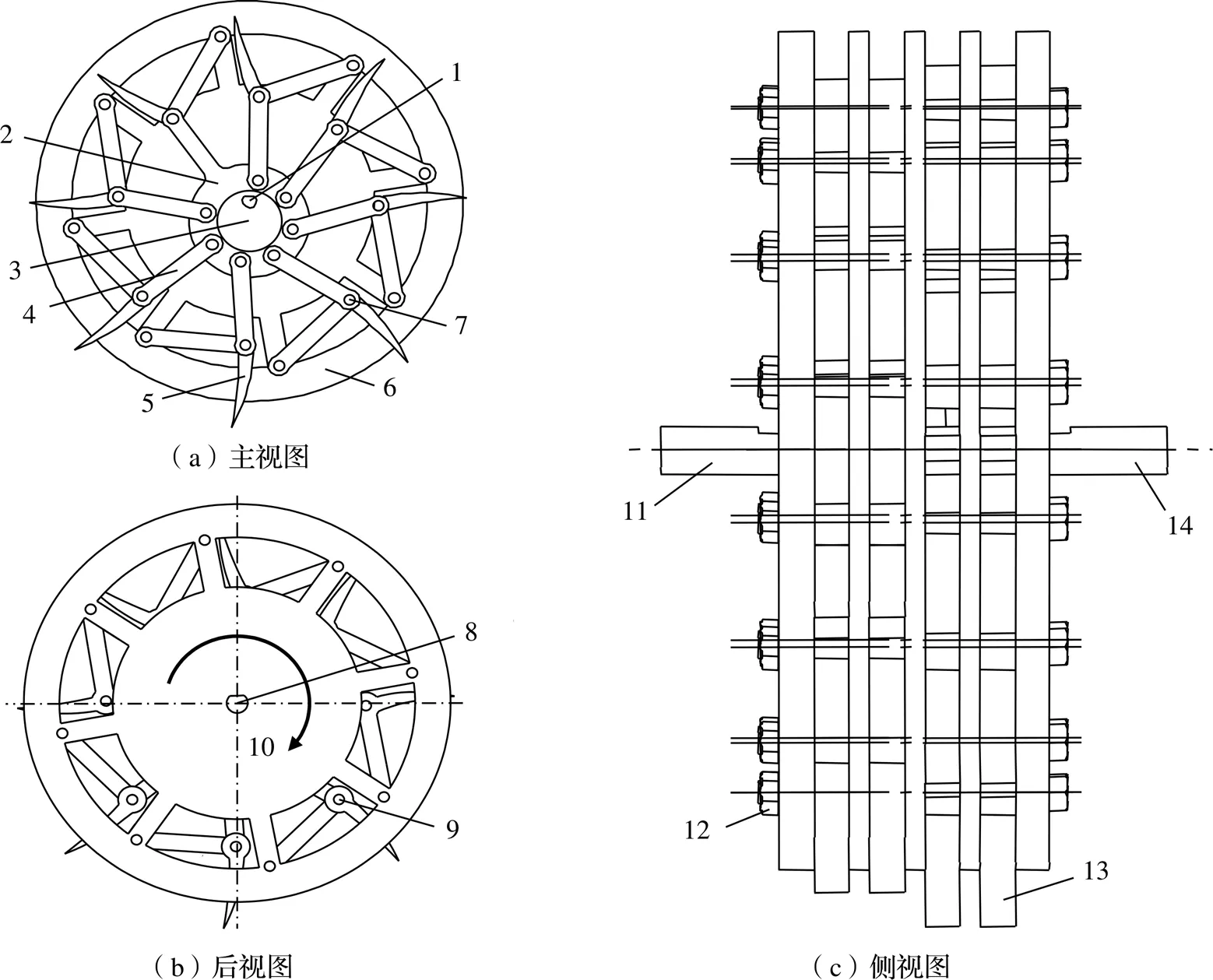
1.偏心轮轴孔;2.偏心轮连杆;3.偏心轮;4.连杆;5.犁爪;6.外轮;7.连接定位孔;8.外轮轴孔;9.连接孔;10.转向;11.电机轴;12.对锁螺钉;13.犁爪;14.偏心轮轴。
1.3 机械臂与丝杠平台机构
喷播机构机械臂与丝杠平台机构是实现喷播功能的关键机构[3],工作原理为:水泵制造高压水流经过文丘里管,在文丘里管中部形成真空度,压力差将种子与营养液吸入文丘里管,由高压水流送至喷口处,在四自由度机械臂和双丝杠平台的配合下完成全自由度喷播。
(1)机械臂的设计[4]。为保证机械臂的耐用程度,选用了较为常见的连杆式四自由度机械臂,材质为铝合金,如图5所示。舵机1控制喷头前后移动,舵机2控制上下,舵机3负责旋转,机械臂需要工作稳定的伺服电动机,且模型中的机械臂较小,所以需要体积小、力矩适中的舵机,经过分析选择MG90S型舵机[5]。
(2)丝杠平台机构的设计。丝杠螺距与平台灵敏度密切相关,还和电动机性能相关,因选用了型号GA12-N20、转速150 r/min的电动机,平台长宽均为300 mm,考虑电机和丝杠架的放置空间,最终选用外径12 mm、导成4 mm、长度230 mm的丝杠,由于丝杠座宽15 mm,所以有效距离为200 mm,通过理论计算和实际参考,32 s就可完成一根丝杠上的来回运动。
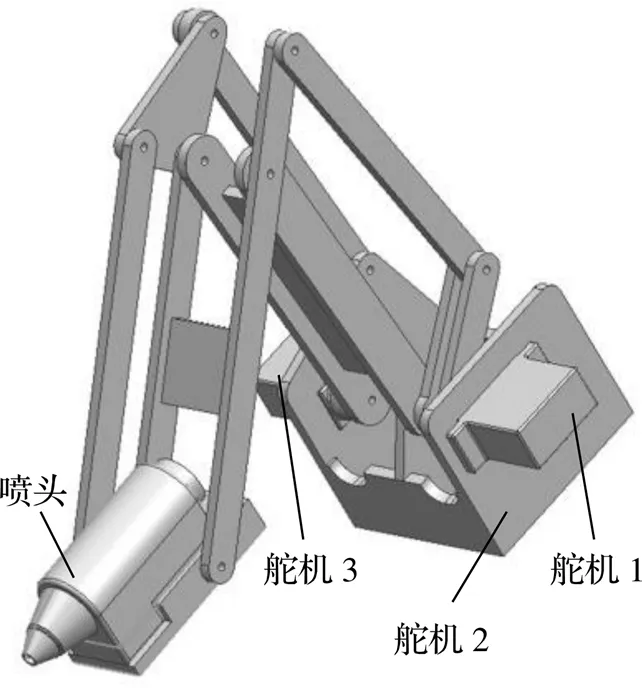
图5 机械臂
(3)文丘里管与水泵的选择。文丘里[6-7]管需要保证种子顺利通过,种子的平均大小为1.2~1.5 mm,所以选用DN15型号,具体尺寸如图6所示,经测量最窄处直径仍有6 mm,不会造成种子堵塞。由于车体携带电源为12 V,故水泵受到较大限制,经过反复实验对比,最终选用流量为32 L/min的12 V水泵。
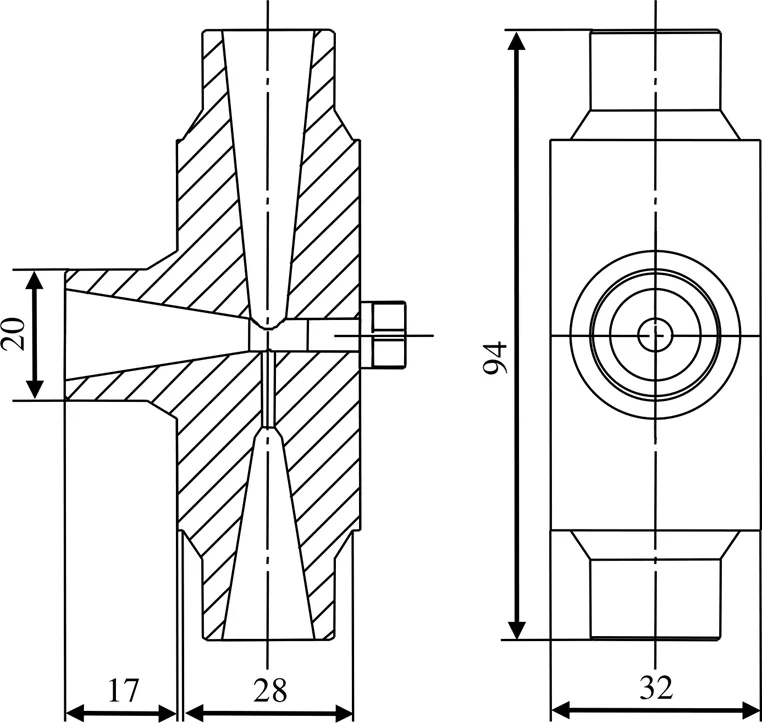
图6 文丘里管基本尺寸(单位:mm)
1.4 物料存储机构
设计了物料存储箱,如图7所示,用于存储草籽及营养液。该存储箱是将种子箱(图8)固定在水箱中,种子箱采用3D打印,有许多镂空设计,并在内里放置了100目的尼龙网纱。这样设计的好处是可以使水自由流动,并保障种子的聚拢,有利于种子的喷播。尼龙网纱边缘用防水胶固定,使网纱底部呈漏斗状,保证即使车体倾斜或出现颠簸时,喷播车仍可以正常喷播。经过多次实验比对,在使用气泵的情况下种子与水的体积消耗比大约为1:5,所以设计的水箱和种子箱尺寸如表1所示。

图7 物料存储箱

图8 种子箱
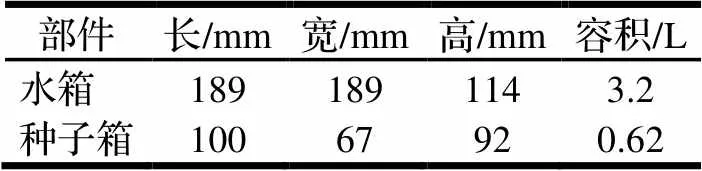
表1 水箱和种子箱尺寸
1.5 机电控制机构
机电控制机构工作原理如图9所示。
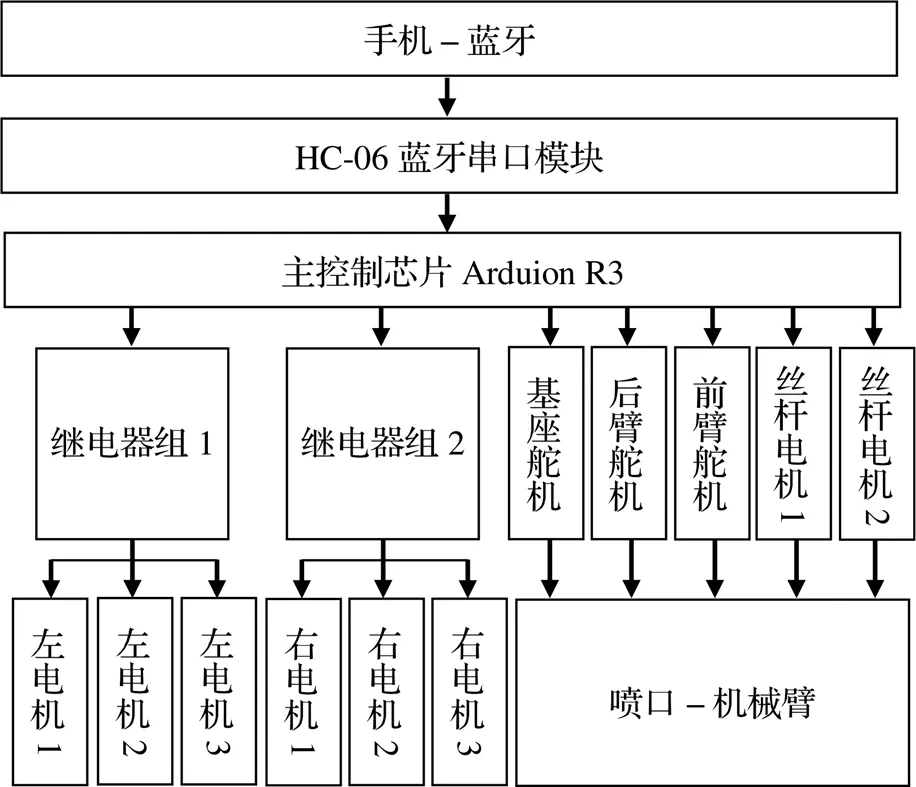
图9 机电控制示意图
(1)主控板:机电控制机构的主控机为Arduino R3,它具有14路输出口,其中5路可作为PWM(Pulse Width Modulation,脉宽调制技术)模拟输出,和6路模拟输入。拥有SDA(Serial Data Line,串行数据线)和SCL(Serial Clock Line,串行时钟线)端口,能够兼容所有现存扩展板,且能用它额外的端口适应新的扩展板,可以满足喷播车的控制需要。
(2)通信接口:通信传输借助JDY-31蓝牙透传模块进行Arduino数据透传,工作频率2.4 GHz、最大发射距离30 m。用户使用个人终端蓝牙连接到JDY-31,JDY-31再通过一个升压电路连接到主控板的TX、RX接口与主控芯片进行数据通信,最终实现人机通信。
(3)机电接口:使用主控板的4个数字输出接口,输出的低压控制信号每2个一组接入2组继电器组中,再通过2组继电器的控制高压信号来控制左右侧2组电机的正转、反转和停止。
(4)机械臂部分:使用主控板的3个PWM模拟输出接口,直接精确控制机械臂的3个舵机的转动角度,通过3个模拟输出信号的不同组合,来实现机械臂不同的精确动作。
2 关键部位的可靠性分析[8]
如图10所示,底板的应力集中在中部、变形集中在边缘,容易脆断,所以需要对底板进行优化设计。经过讨论,决定采用2 mm铝合金板与3 mm亚克力板用螺栓螺母连接的复合板方式对底板脆弱部分进行加强。如图11所示,可知优化后的底板变形均匀,没有集中应力,各项性能明显优于优化前的底板。

图10 优化前底板的位移云图和应力云图

图11 优化后底板的位移云图和应力云图
3 植物种子的选型
基于喷播系统的设计与防风固沙的需求,对种子的要求有:①形状规则,以方便采用文丘里管的方式进行喷播不至于卡堵;②生长周期短,存活率高,可适应恶劣环境;③经济性良好,在保证防风固沙的前提下降低成本。
经过调研和实验,选择了狗牙根[9]、白三叶[10]、百喜草[11]、马莲花、沙打旺。
4 结语
本喷播车通过远程操控、文丘里管代替泥浆泵、多种喷播方式结合等设计,为复杂地形的环保提供了有力的解决措施,有效解决了传统喷播方式的普遍问题。其主要优势为:
(1)该喷播车体积小巧、行动灵活,可以到达传统大型喷播车不能到达的角落作业;
(2)以文丘里管作为喷播装置,相较于泥浆泵来说,价格低廉、体积较小、结实可靠,对不同大小的种子颗粒可使用不同型号的文丘里管,可替换性高;
(3)采用月球车的六轮越障行进机构,越障性能优越,越障车轮可以实现正常轮与越障轮两用,外加两种喷播方式,可以适应多种地形的喷播。
[1]赵海燕,翟亚鑫,曾宪林,等. 复杂地形自适应月球车设计[J]. 中国科技信息,2022(1):34-35.
[2]中国机械工业联合会. 十字槽凹穴六角头螺栓和弹簧垫圈及平垫圈组合件:GB/T 9074.13-1988[S].
[3]许向荣,尚彤. 双丝杠同步控制误差建模与仿真分析[J]. 组合机床与自动化加工技术,2022(4):52-56.
[4]赵江波,修兵凯,王军政,等. 基于多目标优化的救援机械臂结构参数设计[J]. 北京理工大学学报,2022(5):494-501.
[5]何浪,谢明红,刘驰弋. 六自由度机械臂运动学分析与仿真研究[J]. 机械工程师,2022(5):44-48.
[6]韩桂华,杨旭东,陈德裕,等. 探究串联文丘里管空化特性[J]. 哈尔滨理工大学学报,2022(2):55-62.
[7]闫乐乐,李楠,王俊莉,等. 文丘里管设计仿真一体化平台的设计[J]. 内燃机与动力装置,2021(6):71-75.
[8]田学华,张志毅,吴向阳,等. 机电系统可靠性分析规范性方法研究[J]. 检测认证,2022(3):219-222.
[9]叶兴,杨启红,张超波,等. 长江河岸边坡狗牙根根系力学性能研究[J]. 人民长江,2022(4):195-200.
[10]田小霞,卫晓锋,魏浩,等. 6种牧草苗期耐旱性综合评价[J]. 干旱区研究,2022(4):1-8.
[11]宇航,向珞宁,史红玉,等. 百喜草研究及应用进展[J]. 植物保护,2019(24):66-68.
Design of a New Wind Prevention and Sand Fixation Plant Seed Spraying Vehicle
YANG Junyi,XU Lun,SUN Kang,XIA Pusong,DENG Cai,LUO Zihan,LU Xueyu
( School of Mechanical Engineering, Jiangnan University, Wuxi 214122, China)
In view of the needs of land desertification control, road slope protection, and mine restoration, the method of plant seed sowing is employed for wind prevention, sand fixation and vegetation restoration. In this paper, a new wind prevention and sand fixation plant seed spraying vehicle is designed. The device is mainly composed of traveling obstacle crossing mechanism, control mechanism, spraying mechanism, lead screw platform mechanism, electromechanical control mechanism and material storage mechanism, etc. The Venturi tube is used for spraying, and a special eccentric linkage mechanism is independently designed for the traveling obstacle crossing mechanism to better cross the obstacle. The design by three-dimensional software model and several experimental verification and analysis prove that the device design scheme is feasible.
spraying vehicle;venturi tube;spraying platform;electromechanical control
S223.2
A
10.3969/j.issn.1006-0316.2022.07.009
1006-0316 (2022) 07-0054-05
2022-01-06
第九届“南高齿杯”江苏省机械创新设计大赛项目(江南大学01)
仰钧毅(2001-),男,陕西商洛人,主要研究方向为机械工程,E-mail:jndxyangjunyi@163.com;卢学玉(1974-),女,江苏淮安人,硕士,副教授,主要研究方向为机构创新设计及理论。
