单出杆磁流变阻尼器动力学性能测试与建模*
2022-07-28贾春松何洪波
贾春松,邓 鹄,何洪波,陈 伟,张 广,2,3※
(1.西格迈股份有限公司,浙江 台州 317100;2.浙江工业大学机械工程学院,杭州 310014;3.南京理工大学机械工程学院,南京 210094)
0 引言
磁流变液(MRF)是直径为1~5 μm的软磁性颗粒悬浮在特殊的载液中,例如水、矿物油、合成油和乙二醇。其基本流变特征如下:当受到磁场的作用时,可以在几毫秒内可逆地将其状态从牛顿流体转变为类固体,并且具有可控的动态屈服应力[1]。由于MRF 产生的可控流变特性使其器件能够与控制器交互实现连续调节器件的动态力学输出,因此在过去的30年中,人们对MRF及其工程应用越来越感兴趣。磁流变阻尼器(MR damper)是最具有工程应用潜质的磁流变新型半主动机械振动控制装置之一。MR damper 因其可变阻尼特性、机械简单、低功耗和快速响应而引起了汽车领域悬架设计者和研究人员的极大兴趣。MR damper 的优势不仅在于它们能够为悬架提供可变阻尼力,从安全的角度来看,还具有固有的故障安全功能[2]。如果系统出现故障,MR damper可以充当被动阻尼装置,在某一程度上实现安全减振功能。MR damper 的潜在应用包括汽车和航空航天工业领域[3-5]、桥梁和建筑物的抗震保护[6-7]。
许多研究成果证明基于MR damper 的悬架系统可用于控制车辆系统的振动,它显著减少了系统中簧载质量的振动,进而提高在移动车辆的环境中,司机与乘客乘坐舒适性[8]。为了改善乘坐质量,车辆悬架系统的有效振动控制很重要。最近,一些研究人员研究了通过MR damper 的半主动振动系统及其控制算法。Wang 等[9]开发了一种滑模控制算法,最大化MR damper 对结构振动控制的阻尼效果。Gordeev 等[10]利用MRdamper 用于削弱地震对建筑物产生的破坏,并进行了建模与实验验证,结果表明基于MR damper 的减震结构能够明显削弱地震波对建筑物的破坏。李军强等[11]考虑了黏弹塑性模型对MR damper 的动态力学特性进行预测及参数识别。Wereley 等[12]利用4 种不同的模型对线性冲程MR damper 的滞后行为进行表征并建模。Yazid等[13]开发了一种基于神经网络的MR 阻尼器的控制方法。Wu 等[14]开发了一种半主动开关控制策略,用于基于MR damper的座椅悬架系统。Chang 等[15]开发了MRdamper 的座椅悬架系统,并对其减振效果进行评价与分析。需要明确的是在对MR damper用于车辆减振控制之前需要建立一个能够准确反映该器件的动态输出特性,这就使得MR damper 在研制出来后被工程化过程中,在模型预测方面需要做一定的研究和努力。以上研究主要基于MR damper 器件实现减振功能的半主动控制方法,而没有系统地对MR damper 在特定正弦激励下的不同加载电流环境所表现出的动力学性能展开实验分析及建模。
由于MRF 在动态条件下施加磁场及激励载荷,表现出高度非线性的复杂流变行为[16]。因此,在以磁流变液为传力介质的阻尼器件在输出力也会表现出明显的非线性行为,为了理解和预测磁流变阻尼器的操作和动态行为,更好地应用在工程领域中,仍然需要准确的模型。尽管最近提出了各种非参数和参数模型来捕捉MRF 及其阻尼器的动态行为,但最简单的是宾汉塑性模型,它是一种稳态模型,假设流体处于后屈服相并以恒定的剪切速率流动[17-18]。然而,由于MRF 流过的有效阻尼间隙与空隙环半径相比相对较小,因此在文献中可以看出,无限宽的平行板近似流动已被广泛用于建立MR damper 的动力学模型[19-20]。
本文采用西格迈股份有限公司研制的3215 型号MR damper,利用平行板模型建立有效阻尼间隙的动力学模型,对其进行了理论分析,以期对MR damper 进一步优化设计提供一定的理论指导。为了得到该型号阻尼器动态力学特性(力-位移,力-速度),在不同施加电流下(0 A、0.1 A、0.3 A、0.5 A、0.8 A、1 A、1.5 A 和2 A)利用振动系统测试阻尼器在激励频率为5 Hz、振幅为15 mm下的输出结果。利用Bouc-Wen参数模型对该型号MR damper 在不同激励下的动态输出特性进行模型预测及参数识别。
1 磁流变阻尼器的原理
1.1 磁流变阻尼器结构
单出杆MR damper 如图1 所示,主要由浮动活塞1、活塞2、活塞筒3、活塞杆4、电磁线圈接口5、密封滑环6以及电磁线圈7组成。
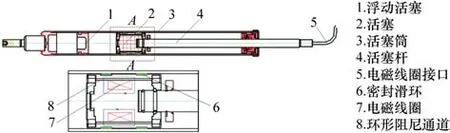
图1 3215型号MR damper的结构示意图Fig.1 Schematic diagram of the structure for the model 3215 MR damper
当MRF 充满阻尼器时,电流通过励磁线圈,由于电磁效应,在活塞与环形阻尼通道8 之间产生磁场回路,磁场方向与MRF的流动方向垂直。MRF在压力作用下通过阻尼通道时,在外磁场的作用下从牛顿流体迅速变为类固体,具有一定的可控剪切屈服应力,MRF 通过阻尼通道时需要克服阻尼力,该阻尼力能够通过调节电流加以调控,因此能够实现车辆悬挂的减振效果。活塞(即磁芯)是决定磁流变阻尼器性能的重要部分。磁芯的材料直接影响阻尼器的隔振性能。改变磁路的励磁电流的大小可以改变磁通密度,从而达到改变阻尼力的目的。在这种结构中,活塞采用高磁导率的低碳钢制成,阻尼筒壁采用低磁导率铝合金材料制成。
1.2 磁流变阻尼器的平行板理论分析
从图1 可知该型号MR damper 阻尼通道设计在活塞内部,活塞在运动过程中由于两个腔体存在压力差导致MRF 在阻尼通道产生压力流,图2 所示为环形阻尼通道在直角坐标系中的平行板模型,其中d=R2-R1,L为活塞的长度,该平行板垂直于z-y平面上的宽度W=2πR1,两个腔室的压力差可表示为:Δp=p1-p2=,其中,Ap为活塞有效工作截面积;p1和p2分别为两个腔室的压力;Ad=Wd为环隙截面积。
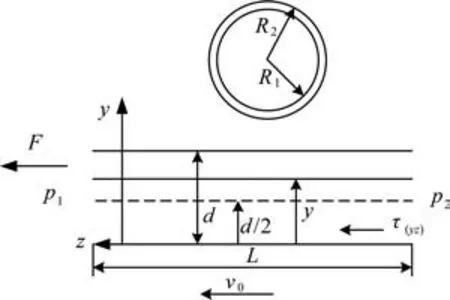
图2 直角坐标系中基于压力流的平行板模型Fig.2 Parallel plate model based on pressure flow in Cartesian coordinate system
一维准稳态条件下,根据受力平衡得:

整理式(1)得到剪切应力方程:

MRF 在磁场作用下会发生显著可控磁流变效应,表现出非牛顿流体特性,因此存在剪切细化行为,为了更加精确描述MR damper 的输出阻尼特性,本文采用Herschel-Bulkley本构模型描述MRF的流变效应。
Herschel-Bulkley本构模型可以描述如下:

这里引入Bingham 系数Bi来讨论Bingham 模型下流体在平行板之间的应力分布为:

对比式(3)和式(4)(结构一致),得出Herschel-Bulkley 本构模型下磁流变材料在平行板间的剪切应力分布:

式中:HB为Herschel-Bulkley系数,具体表达如下:

HB的物理含义与Bingham 系数Bi一致,此时活塞受力可表示为:

整理式(7)得出阻尼系数方程:

式(8)为最终求得的阻尼器的阻尼系数,从该表达式中可以看出阻尼器的阻尼不仅仅跟阻尼器的几何参数有关,还跟Herschel-Bulkley 本构模型中的各个参数有关。几何参数在阻尼器本设计出来后直接被确定了,Herschel-Bulkley 本构模型中的参数需要测试所用MRF的动态流变特性,再进行参数识别后获得。
2 磁流变阻尼器动态特性测试分析
图3 所示为该型号MR damper 动态输出性能测试装置(周期为0.1 s 以及振幅范围为-5~5 mm 的正弦激励),其动态输出特性,即阻尼力-位移曲线、阻尼力-速度曲线如图4 所示。其他频率以及幅值下测得的曲线具有类似的规律。
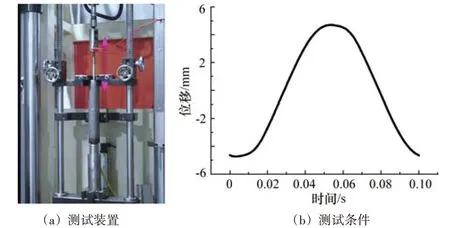
图3 测试过程中位移-时间曲线Fig.3 Displacement-time curve during the test
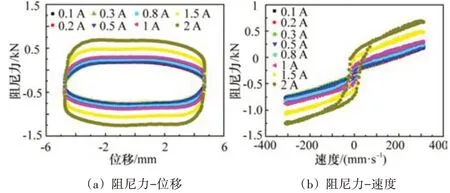
图4 在激励频率为10 Hz、振幅为5 mm下该型号MR damper特性曲线Fig.4 Characteristic curves of this model MR damper at an excitation frequency of 10 Hz and an amplitude of 5 mm
从图4所示的曲线中可以明显看出:无论是阻尼力-位移曲线还是阻尼力-速度曲线都具有显著的非线性和滞回特性;仅由黏性力引起的最低阻尼力出现在零电流输入处,并且阻尼力随着电流输入的增加而增加;通过改变输入电流可以很容易地获得可控阻尼力。这意味着,与经典缓冲器相比,MR damper 可以在指定的动态输出阻尼力范围内提供无限可变的负载循环。
图5所示更加清楚地描述了该型号MR damper动态最大输出阻尼力与激励电流之间的关系。由图可知,施加电流对该型号最大输出阻尼力具有显著影响,并且表现出明显的阶段性特性。刚开始施加激励电流时,电流从0 ~0.5 A 阶段,最大输出阻尼力随电流增强表现出小幅增大趋势,如电流为0 A 和0.5 A 时,最大输出阻尼力为173 N 和191 N。随着电流进一步增强,最大输出阻尼随着电流增强明显增大,从0.5 A 下的191 N 到2 A 下的681 N。导致电流对最大输出阻尼力影响具有阶段性的现象可能如下:(1)MRF 中的羰基铁粉颗粒的磁化曲线具有类似的行为;(2)MRF 的磁流变效应随着磁场变化表现出先缓慢增大到显著增大的趋势。基于以上两点,使得阻尼器在宏观输出与输入电流的关系表现出如上特征。
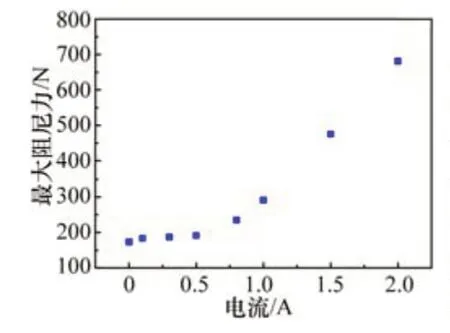
图5 最大输出阻尼力与激励电流的关系Fig.5 The relationship between the maximum output damping force and the excitation current
3 基于Bouc-Wen 参数模型的磁流变阻尼器动态特性预测
Bouc-Wen 模型首先是由Bouc 和Wentic 提出的用于构建磁流变行为中的应力-应变滞回特性。如图6 所示,Bouc-Wen 模型由Bouc-Wen 算子和一个弹性单元和一个黏性单元并联组成。因此,Bouc-Wen 模型激发的应力/力与应变的关系可以描述为:
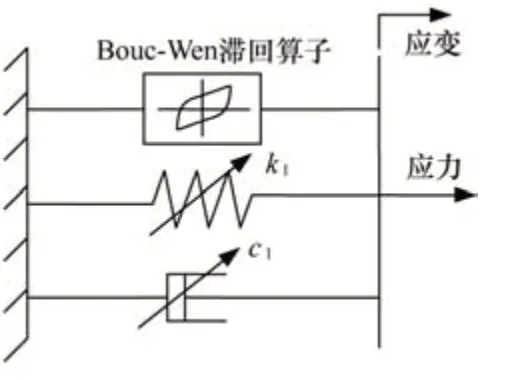
图6 Bouc-Wen模型Fig.6 Bouc-Wen model

式中:x和ẋ分别为剪切应变和剪切速率;k1和c1分别为弹性系数和黏性系数;x0为模型参数中弹簧的初始位移。
z为Bouc-Wen滞回算子,其具体表达式如下:

式中:ż为z对时间的微分;A、β和γ为模型形状控制参数;n为滞回曲线平顺系数。
利用Bouc-Wen 参数模型对图4 所示的阻尼力-位移曲线和阻尼力-速度曲线进行模型预测,并与实验值进行比较,结果如图7所示。从图中可以观察到利用Bouc-Wen 参数模型的预测值与测量值非常吻合。由图7(b)可以推断,随着电流输入的增加,阻尼力与速度曲线的局部非线性特性趋于显著。这可以归因于这样一个事实,即MRF的表观黏度随剪切应变率变化,导致MRF的剪切变稀或增稠行为。本研究中使用的Bouc-Wen 模型没有考虑材料的剪切变稀或增稠行为。因此该模型对该型号MR damper的阻尼力-速度曲线预测精度不高,但预测结果基本能趋于实验结果。由图7(a)可以看出在低激励电流下,模型的预测精度较好,推断这可能是由于流体惯性力,随着激励加速度的增加,与诱导屈服应力相比,在较低的电流输入下,惯性力变得更加重要。
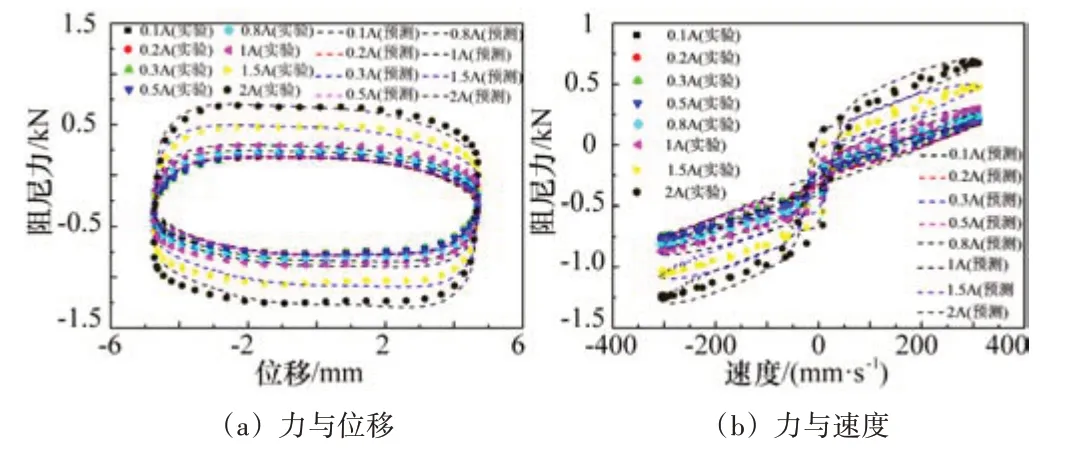
图7 模型预测与实验数据的比较Fig.7 Comparisons between the model predictions and experimental data
4 结束语
本文利用Herschel-Bulkley 本构模型,建立直角坐标系下的阻尼通道平行板模型,计算得到MR damper 的阻尼系数,并讨论针对个别MR damper 阻尼系数的获得方法,对MR damper 的设计和选择具有一定的理论指导意义。采用西格迈股份有限公司自主研发的型号为3215 型MR damper 测试得到阻尼力-位移、阻尼力-速度特性曲线,并对测试结果展开分析。结果表明通过改变输入电流可以很容易地获得可控阻尼力,证明该型MR damper在指定的动态输出阻尼力范围内提供无限可变的负载循环。激励电流对最大输出阻尼力的影响具有明显的阶段性。最后通过Bouc-Wen 参数模型预测阻尼力-位移曲线和阻尼力-速度曲线,并于测试值进行对比,结果表明对MR damper的动态特性,Bouc-Wen 参数模型具有较好的预测能力,证明该型号阻尼器具有较好的工程可控性。
