线缆连接对多级卫星控制性能的影响分析
2022-07-27张科备
樊 茂 汤 亮,2 关 新,2 张科备,2
1. 北京控制工程研究所,北京 100190;2. 空间智能控制技术国防科技重点实验室,北京 100190
0 引言
以高精度对地观测为背景的航天任务对天基卫星观测平台控制系统的精度、稳定度提出了极高的要求[1]。目前制约卫星平台控制精度、稳定度的因素主要有2点:1)以太阳能帆板为代表的挠性附件低频振动(0.1~10Hz)与以控制力矩陀螺为代表的执行机构高频扰动(10~200Hz)对平台快速稳定能力与扰动抑制能力的影响;2)航天器轨道运动过程中运动速度与动态过程对指向精度与敏捷机动能力的影响。
为了解决上述两个因素对卫星平台的影响,许多工程师都对主动指向、主被动隔振装置进行了大量的研究与应用。例如JWST(James Webb Space Telescope, JWST)空间望远镜[2-3]装配了隔振器来减少振动对光学载荷成像产生的影响,并利用快摆镜控制载荷光轴的快速指向;Kepler望远镜采用Stewart平台进行隔振,实现了载荷与卫星的微振动隔离[4]。ACCESS(Actively-Corrected Coronagraph for Exoplanet System Studies, ACESS)卫星[5-6]提出了由姿态控制系统、平台指向系统和精确调节镜组成的三级指向控制系统,实现了卫星光学载荷的振动抑制与指向控制。LUVOIR(Large UV Optical Infrared Surveyor, LUVOIR)空间望远镜[7-8]采用非接触式的隔振平台DFP(Disturbance Free Payload, DFP)[9],实现了载荷的精确指向和振动隔离。
为了实现卫星的主动隔振与高精度高稳定度的姿态指向控制,美国等航天强国正在积极探索与研究基于多级协同控制平台的高性能航天器。针对多层分级控制卫星的动力学建模与振动抑制,大量学者对其进行了研究[10-16]。文献[10]利用Kane方法建立了6杆平台动力学模型,并提出了一种非线性控制器。文献[11-12]利用牛顿欧拉方法建立了Stewart平台隔振动力学模型,实现了载荷与星体的振动隔离。文献[13]进一步考虑了电磁力作为Stewart平台执行力时系统的动力学模型,建立了运动仿真平台一体化动力学模型。文献[14]利用拉格朗日方法建立了6自由度液压Stewart-Gough平台,并设计了考虑摩擦和伺服阀影响下的反馈控制器。文献[15]建立了利用音圈电机作为执行机构的振动抑制平台,并结合试验验证了平台的隔振效果。文献[16]针对空间望远镜高稳定控制需求,设计了主动阻尼和被动阻尼相结合的控制方法。虽然学者对多级控制系统进行了大量的研究,但是很少有对载荷与卫星平台之间存在电缆等附加连接时的情况进行分析。为了保持卫星平台和载荷之间的通信与供电等需求,两级平台之间存在线缆等附加连接,电缆等附加连接可能导致系统指向精度与隔振效果的下降,因此有必要对该问题进行研究。
本文针对星体与载荷之间存在的线缆等附加连接问题,分析了附加连接对多级协同控制系统控制性能的影响。首先,本文利用牛顿欧拉方法建立了卫星-载荷多级动力学系统,为分析附加线缆连接对系统产生的影响提供了动力学基础;其次,将线缆连接等效为附加刚度,建立了附加连接的力学模型并加入多级卫星平台动力学系统;最后,仿真分析了附加刚度对开环与闭环系统隔振效果的影响,进一步分析了附加刚度对多级协同控制系统控制稳定性与指向控制精度的影响。
1 系统介绍与动力学建模
1.1 系统介绍
卫星平台两级协同主被动一体化控制示意图如图1所示,在卫星平台姿态控制的基础上,增加主动指向超静平台二级控制,实现了卫星姿态的快速机动与稳定控制。
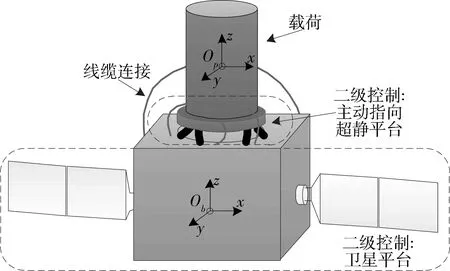
图1 卫星平台两级协同主被动一体化控制示意图
两级协同控制平台中的一级控制采用传统卫星平台的姿态控制系统,实现了卫星姿态指向的粗调整。
二级控制为主动指向超静平台,平台连接卫星平台和载荷,实现了载荷光轴的快速精细调节与振动隔离。主动指向超静平台由多组作动器按照一定构型组成,利用作动器的直线伸缩运动实现了载荷姿态的精准调节。为了保持卫星平台和载荷之间的通信与供电等需求,两级平台之间存在线缆等附加连接。
1.2 载荷、卫星平台动力学模型
光学载荷具有质量惯量小、无挠性附件的特性,可将载荷视为刚体进行建模。载荷质心的平动和转动动力学方程分别如式(1)和(2)所示
(1)
(2)

建立刚体卫星平台动力学模型[17]
(3)

1.3 主动指向超静平台模型
主动指向超静平台作动器连接卫星平台和载荷,其构形如图2所示
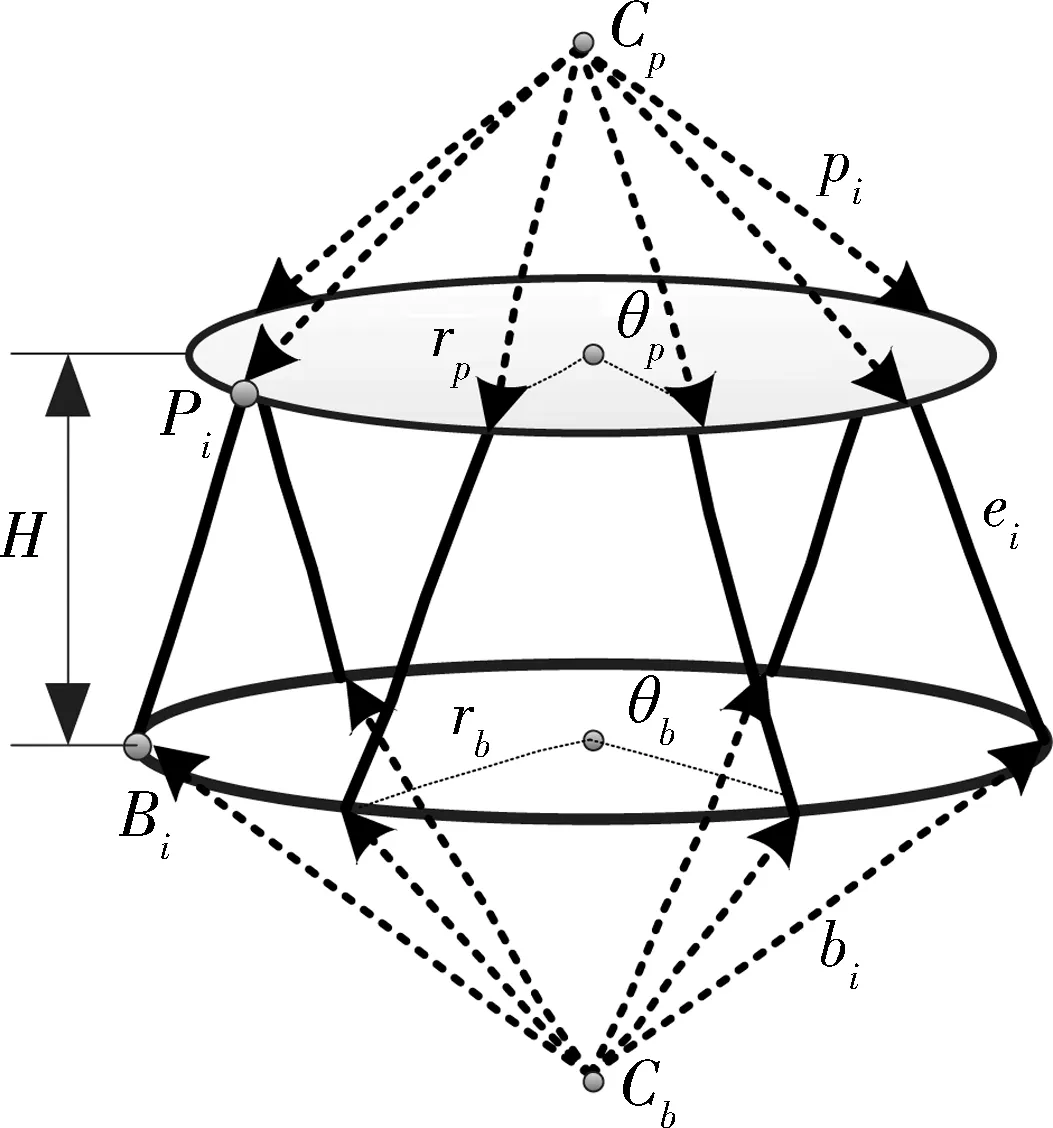
图2 主动指向超静平台作动器构形

主动指向超静平台单个作动器原理如图3所示。作动器的输出力包括弹簧和阻尼在内的被动力与电机输出的主动力。
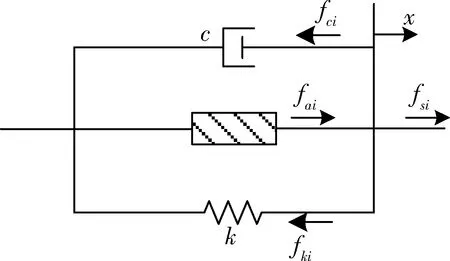
图3 作动器动力学原理图
(4)
主动指向超静平台作动杆输出力列阵可表示为
(5)

ΔL=JPXP+JbXB
(6)
其中,XP表示载荷平动和转动产生的位移和转角;XB表示卫星平台平动和转动产生的位移和转角。主动指向超静平台被动环节对载荷产生的回复力为
(7)
同理,主动指向超静平台被动环节对卫星平台产生的回复力为
(8)
联合式(5)~(8)可知,主动指向超静平台对载荷与卫星平台的作用力由电机产生的主动环节与弹簧阻尼产生的被动环节构成,其输出合力可表示为如下形式
(9)
(10)
其中,JP表示主动指向超静平台对载荷质心的雅克比矩阵;Jb表示主动指向超静平台对卫星平台质心的雅克比矩阵。
2 附加刚度计算
星体质心与载荷质心六自由度连接除了平动和转动刚度外,也包含平动与转动的耦合刚度
(11)
式中,Fp,Tp,Fb,Tb分别表示载荷质心平动力、载荷质心转动力矩、星体质心平动力和星体质心平动力矩;Kpp,Kpb,Kbp,Kbb分别表示载荷刚度矩阵、载荷受力与星体位移的耦合刚度矩阵、星体受力与载荷位移的耦合刚度矩阵和星体刚度矩阵。
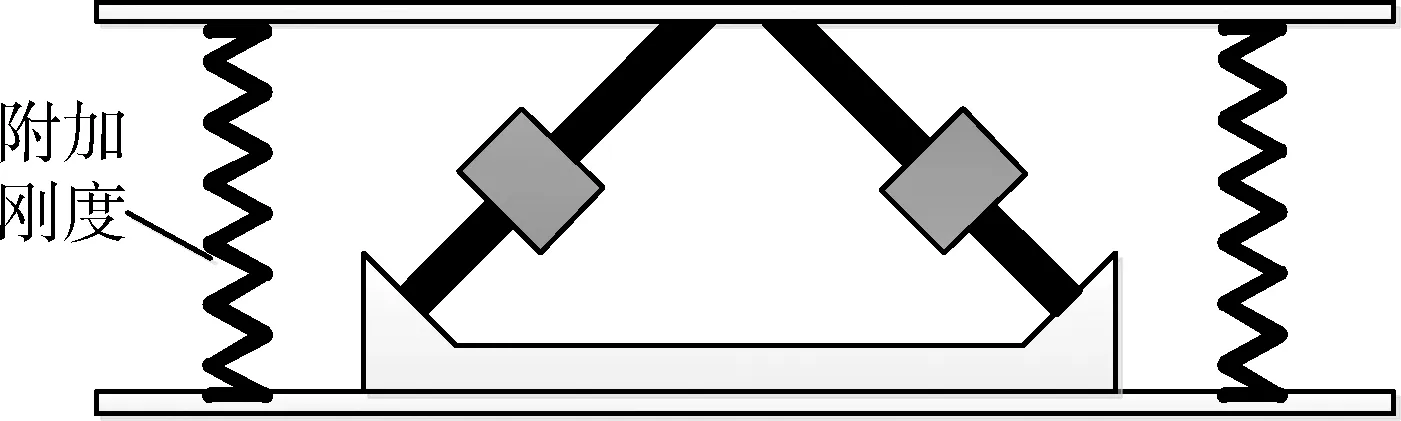
图4 附加刚度等效图
公式(12)~(15)表示无附加刚度与有附加刚度时主动指向超静平台被动环节的合成刚度矩阵。
无附加连接时载荷刚度矩阵Kpp如下所示
(12)
无附加连接时载荷受力与星体位移耦合刚度矩阵Kpb如下所示
(13)
电缆附加连接产生的载荷附加刚度矩阵ΔKpp如下所示
(14)
电缆附加连接产生的耦合刚度矩阵ΔKpb如下所示
(15)
最终式(12)与式(14)相加表示存在电缆附加连接时的载荷刚度矩阵,式(13)与式(15)相加表示存在电缆附加连接时的耦合刚度矩阵。
3 附加刚度对系统影响
3.1 开环系统扰动传递率曲线
开环系统扰动传递率曲线对比如图5~7所示。扰动传动率传递函数的输入为星体转角,输出为上平台载荷转角。

图5 开环系统x轴转动扰动传递率曲线对比

图6 开环系统y轴转动扰动传递率曲线对比

图7 开环系统z轴转动扰动传递率曲线对比
由图5~6可以看出,存在附加刚度的开环扰动传递率曲线存在耦合现象,转动平动之间相互影响;除此之外,附加刚度使系统固有频率提升,开环系统高频阶段的被动隔振效果变差。
3.2 闭环系统扰动传递率曲线
文章利用PID控制实现了卫星的姿态控制与载荷的指向控制,其两级协同一体化控制框图如图8所示。

图8 两级协同一体化控制框图
卫星平台的姿态控制器设计如下
(16)
式中:Kbp,Kbi,Kbp表示卫星平台姿态控制器的控制参数;δθbe,δωbe分别表示卫星平台姿态误差与角速度误差,可由下式求出
(17)
式中:δqvb表示误差四元数的矢量部分;qb,qbd分别表示卫星平台实际、期望姿态四元数;ωbd,ωb分别表示卫星平台期望、实际角速度。
同卫星平台姿态控制一样,载荷指向控制器如下
(18)
式中:Kpp,Kpi,Kpd表示载荷姿态控制器的控制参数;δθpe,δωpe分别表示载荷姿态误差与角速度误差,可由式(19)求出。
(19)
式中:δqvp表示误差四元数的矢量部分;qp,qpd分别表示载荷实际和期望姿态四元数;ωpd,ωp分别表示载荷期望和实际角速度。
根据计算出的载荷指向控制力矩,设计作动器分配律。由于载荷指向控制只对姿态方向有控制力矩,对载荷平动方向无力约束作用,因此作动器分配律如下
(20)
以y轴为例,分析闭环扰动传递率曲线,如图9所示。从图中可以看出,附加刚度降低了系统低频与高频阶段的隔振效果。
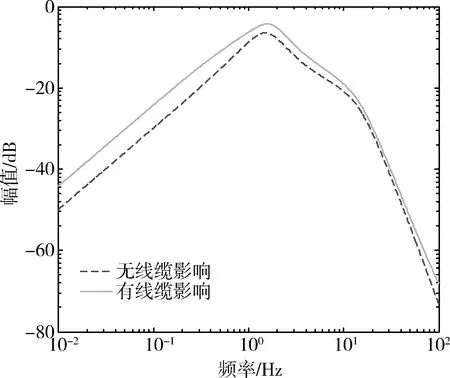
图9 闭环系统y轴转动扰动传递率曲线对比
3.2 载荷稳定性与指向精度
如图10所示,以y轴转动通道为例分析附加刚度对系统稳定性的影响,y轴幅值稳定裕度由5.62dB下降到4.89dB。

图10 y轴Nichols图稳定性对比

(21)
以y轴转动为例,分析主动指向超静平台的隔振效果,由图11载荷姿态角度变化曲线可以看出,附加线缆对姿态指向控制精度影响不大;由图12角速度变化曲线可以看出,附加刚度略微降低了主动指向超静平台对载荷的隔振效果;由图13可以看出,虽然附加连接略微降低了隔振效果,但是主动指向超静平台依然对载荷有良好的隔振效果。

图11 载荷y轴姿态指向对比曲线

图12 载荷y轴姿态角速度变化曲线

图13 存在线缆连接时y轴隔振效果对比曲线
4 结论
针对实际工程中多级协同控制平台存在的线缆等附加连接问题,分析了主动指向超静平台的隔振效果、稳定性与控制精度。
仿真结果表明,存在线缆等附加刚度连接时的系统:1)放大了耦合现象,转动平动之间相互影响;2)系统固有频率提升,高频阶段被动隔振效果略微降低;3)载荷控制系统稳定性略微降低。在实际工程中,可通过增加线缆长度、减少附加连接刚度或设计补偿控制器等措施降低附加连接对系统产生的影响。
