STM32的四轴飞行器的设计
2022-07-23湛江科技学院杨超琼韦发清
湛江科技学院 杨超琼 韦发清
四轴飞行器属于无人飞行载具中较为常见的一种,是采用十字形布局的电机与螺旋浆直连的结构,通过各电机转速的调整与配合,飞行器在飞行过程中可以获取旋转机身、改变飞行姿态的力,从而实现稳定飞行。随着微机电技术高速发展,四轴飞行器使用愈加广泛,例如在交通、航拍、无人机表演、农业及快递等领域均有投入使用。
1 四轴飞行器总体设计
四轴飞行器由遥控器和飞控两大部分构成,遥控器可发送各种控制指令至飞控,飞控接收到指令后会快速响应指令进而改变其飞行状态。其具体组成如图1所示,遥控器主要由STM32F103控制器、摇杆ADC、OLED显示屏、NRF24L01无线收发模块组成,飞控部分由STM32F411主控模块、MPU9250姿态数据处理模块、电机驱动模块、BMP280定高数据处理模块及NRF51822无线通信模块组成。

图1 系统结构框图
2 四轴飞行器硬件电路设计
2.1 主控模块
本设计主控芯片为STM32F411CEU6,具有128K字节静态随机存储器、512K字节FLASH闪存、3路USART、3路I2C、11个16位和32位100MHz的定时器等,能够完全满足设计需求。主控模块主要是将从MPU9250和BMP280传感器中获取的数据通过算法进行处理后,通过PWM信号控制电机,以达到飞行器稳定飞行的目标。其电路如图2所示。
2.2 传感器模块
本设计选择MPU9250传感器电路,MPU9250实际上是内部集成了一个MPU6500六轴传感器和一个AK8963三轴磁力计,他们共用一个IIC接口,这样组合成一个九轴传感器。飞控是通过IIC接口来控制MPU9250的测量配置和读取MPU9250传感器寄存器中的六轴测量数据。其电路图如图3所示。

图3 传感器电路
2.3 无线通信模块
本设计中四轴飞行器使用的无线通信电路主要由飞控端使用的NRF51822和遥控器端使用的是NRF24L01两部分组成。飞控端NRF51822通过USART接口与STM32F411CEU6连接,遥控端NRF24L01采用SPI接口与STM32F103C8连接,遥控端通过NRF24L01发送各类指令,飞控端通过NRF51822接收各类遥控端发送的指令并做出及时响应,进而实现飞控与遥控器两大模块之间的无线通信。其电路图分别如图4、图5所示。

图4 NRF51822无线通信电路

图5 NRF24L01无线通信电路
2.4 摇杆装置模块
摇杆装置模块是遥控器中重要组成部分,采用的是带按键及360°自动回中类型。遥控器配有两个摇杆,分别为油门摇杆和方向摇杆,一个摇杆有2个电位器,电位器中心抽头连接至MCU的ADC引脚。其中油门摇杆2个电位器的电压AD值转换为对应THRUST(油门)和YAW(航向角)的控制值;方向摇2个电位器的电压AD值转换为对应PITCH(俯仰角)和ROLL(横滚角)的控制值。所有电位器采集的AD值范围都在0-4095,然后将AD值转换为对应控制值。其电路图如图6所示。

图6 摇杆电路
3 四轴飞行器软件设计
3.1 MPU9250
MPU9250内部集成有3轴陀螺仪(测角速度)、3轴加速度计和3轴磁力计,输出均为16位的数字量,可以通过集成电路总线(IIC)接口和单片机进行数据交互,传输速率可达400kHz/s。3轴陀螺仪动态特性反应迅速,能够测量的角速度范围最大为±2000(°/s);3轴加速度计则更为适合静态测量重力加速度g,其测量范围可达±16g;3轴磁力计主要可测量磁感应强度范围为±4800μT之间,其在测量偏航角的过程中起辅助作用。
飞行器机身姿态角度信息θ(俯仰角)、φ(横滚角)、ψ(航向角)需要由姿态传感器MPU92503轴分别测量到角速度、加速度、磁感应强度信经解算后获取。地平面与三角坐标系中X轴形成的角度称之为俯仰角θ,地平面与三角坐标系中Y轴构成的角度称之为横滚角φ,其绕三角坐标系中Z轴旋转的角度称之为航向角ψ。本设计将主控芯片STM32F411CEU6和MPU9250姿态传感器结合,实现了姿态角度检测的功能;为进一步准确检测机身本体的姿态角度,对陀螺仪、加速度计、磁力计测算的角度信息采用互补滤波算法进行处理后获取更加精密的数据。
3.2 PID算法控制
由比例(Proportion)、积分(Integral)和微分(Derivative)三单元构成的PID反馈回路被广泛应用在工业控制领域。基于反馈理论中测算、比较和执行三要素,对于PID控制器,就需要将实际的测量值和期望值进行比较,帮助系统纠正在运行过程中出现的偏差。
在得到测量值和设定的参数值之后,可以使用PID反馈回路调整系统使之达到或保持在期望值,PID控制框图如图7所示。PID系统不具备良好的动态响应特性,适合应用在不随时间变化的线性系统。由四轴飞行器的机身升力与其螺旋桨转速呈平方倍关系,且电机转速与输出电压并不是呈线性关系可以看出飞行器是非线性系统,故四轴使用单极PID反馈回路很难取得预期效果。
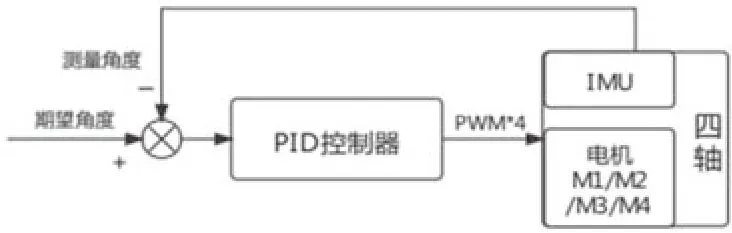
图7 单极PID
为解决以上问题,提出了串级PID的方法。串级PID是由内环PID控制和外环PI控制嵌套组成。其中内环比例单元P的作用是纠正四轴飞行器的角速度,积分单元I能够将飞行器角速度控制静差消除,积分单元D对四轴系统运动起抑制作用;外环比例单元P可以纠正四轴飞行器角度,积分单元I可实现消除飞行器角度控制静差的功能。
串级PID与单极PID不同,由图7可知单极PID输入和反馈的数据分别是期望角度和测量角度,但是如图8所示串级PID外环与单极PID一致均为角度信息,其内环的输入信息为期望角速度、反馈信息为测量角速度。通过内外环结合在一起控制飞行的角速度与角度,飞行器即使在外环角度数据出现较大变化时,依然能够平稳飞行。

图8 串级PID
结语:基于以上设计,选用的STM32F4系列的主控芯片STM32F411CEU6,9轴状态传感器MPU9250釆集飞行器姿态数据信息,气压定高传感器BMP280测量四轴飞行器的飞行高度,NRF81255芯片进行无线通信,在飞行过程中,通过PID控制算法消除误差,能够实现对四轴飞行器各姿态的精准控制。
