基于累积帧间差分法和掩膜的SF6红外检漏视频定位算法研究
2022-07-22邓剑平
黄 柏 杨 帆 邓剑平 毕 凡
基于累积帧间差分法和掩膜的SF6红外检漏视频定位算法研究
黄 柏 杨 帆 邓剑平 毕 凡
(广州供电局有限公司电力试验研究院,广州 510410)
自动化、智能化是变电站发展的趋势,越来越多的自动巡检机器人被应用于巡检工作中。红外图像检漏技术是常用的电气设备SF6气体检漏手段,既可以针对局部查找漏点,又可以快速大范围巡检。因此,对红外检漏自动定位算法的研究有其必要性。本文研究一种SF6红外检漏视频定位算法,它既可用于变电站自动巡检机器人的红外检漏自动定位,亦可用于手持式红外图像检漏仪辅助定位。首先将红外图像灰度化,并利用高斯模糊技术消除噪声干扰;其次通过阈值变换在首帧图像中识别设备区域,得到掩膜;然后基于漏点位置相对固定且持续的特性,使用累积帧间差分法获取红外图像的累积变化;最后根据掩膜排除不在设备区域的干扰,对SF6泄漏点进行定位和统计。实验表明,该算法能准确定位SF6漏点位置,运算速度快且抗干扰性好。
红外图像;SF6;累积帧间差分法;掩膜;漏点定位
0 引言
SF6是一种无色、无味的惰性气体,因良好的绝缘和灭弧性能,在气体绝缘金属封闭开关设备(gas insulated switchgear, GIS)等高压电气设备中得到广泛的应用[1-2]。SF6气体泄漏是造成此类电气设备失效的主要原因[3]。相比于传统的包扎法、肥皂法、手持式检漏仪定性检漏法,红外带电检漏技术不需要停电作业、不用接触电气设备,是一种更为便捷安全且直观有效的检漏手段[4]。
红外线泄漏检测技术是利用SF6气体与空气的红外辐射特性实现的。SF6泄漏会向外辐射红外线能量,对周边环境造成一定的影响,在使用红外成像技术进行成像时,通过分析对比SF6气体与空气红外图像的差异,就能实时、精确地探测出SF6泄漏点,并生成直观的红外图像。
随着变电站自动化和智能化水平的不断提高,变电站巡检机器人逐渐取代人工巡检成为今后的发展方向[5]。红外图像检测仪是巡检机器人搭载的重要监测设备之一。目前,关于红外图像处理的研究主要集中在红外测温领域[6],通过图像处理、智能识别等算法对红外测温图像中的设备进行识别,并找出故障设备。在生产中,红外检漏仍主要依赖人眼判断,相关研究主要集中在检测效果的加强方法方面[7]。基于图像处理的红外检漏方法属于运用运动目标图像的定位算法,主要分为帧间差分法[8]、背景差分法[9]、光流法[10]。本文研究一种基于图像处理的红外检漏定位算法,使用阈值变换分割设备区域与背景区域,基于SF6泄漏点的红外图像特性使用累积帧间差分法来实现漏点定位。
1 图像预处理
1.1 灰度化
每个红外图像均为RGB彩色图像,每个像素均包含红(R)、绿(G)、蓝(B)三部分。由于漏点识别主要和亮度有关,故为了降低对计算机硬件、软件性能的要求,将彩色图像进行灰度化处理。图像灰度化是指将一张彩色照片的亮度分为0到255个级别,0为全黑色,255为全白色。彩色图片灰度化的方法为[11]

式中,Y为亮度。图片灰度化处理效果如图1所示。
1.2 高斯模糊
由于后续检漏定位的算法对图片变化较为敏感,为了减少环境和拍摄者动作对图像造成的干扰,对每一帧灰度化后的图像进行高斯模糊处理。高斯模糊是一种通过高斯分布来减小图像杂散程度和细节层次的方法[12],其计算公式为

式中:x和y为坐标值;为滤镜半径。高斯模糊效果如图2所示。
1.3 图像掩蔽
图像掩蔽是指对所处理的图像(全部或局部)进行遮蔽,以控制图像处理的范围或过程。在漏点识别定位中,SF6漏点只存在于设备区,通过划分设备区域和背景区域可以有效排除外界干扰。假设单次定位中红外摄像仪拍摄位置变化不大,使用阈值法[9]对视频的首帧图像划分设备区域与背景区域。在红外图片中,一般带电电气设备区域比背景区域亮度要高。阈值法是一种简便、高效的图像分割方法,它把图像上灰度高于限值的点设为全白色,其他点设为全黑色。这样,截图就变成一张黑白相间的图片,图片中白色的部分则为设备部分。
由于SF6气体泄漏是一种扩散运动,这种运动往往会稍超出设备区域,故使用图像形态学膨胀[9]操作留出一定裕度,将其称为掩膜。对于远处有干扰的情况,还可以采取图像形态学腐蚀[12]操作后再膨胀进行消减。掩膜的过程如图3所示。图3(c)通过腐蚀除去零散的不在设备区域的白色部分,再经过膨胀最终得到的掩膜如图3(d)所示。
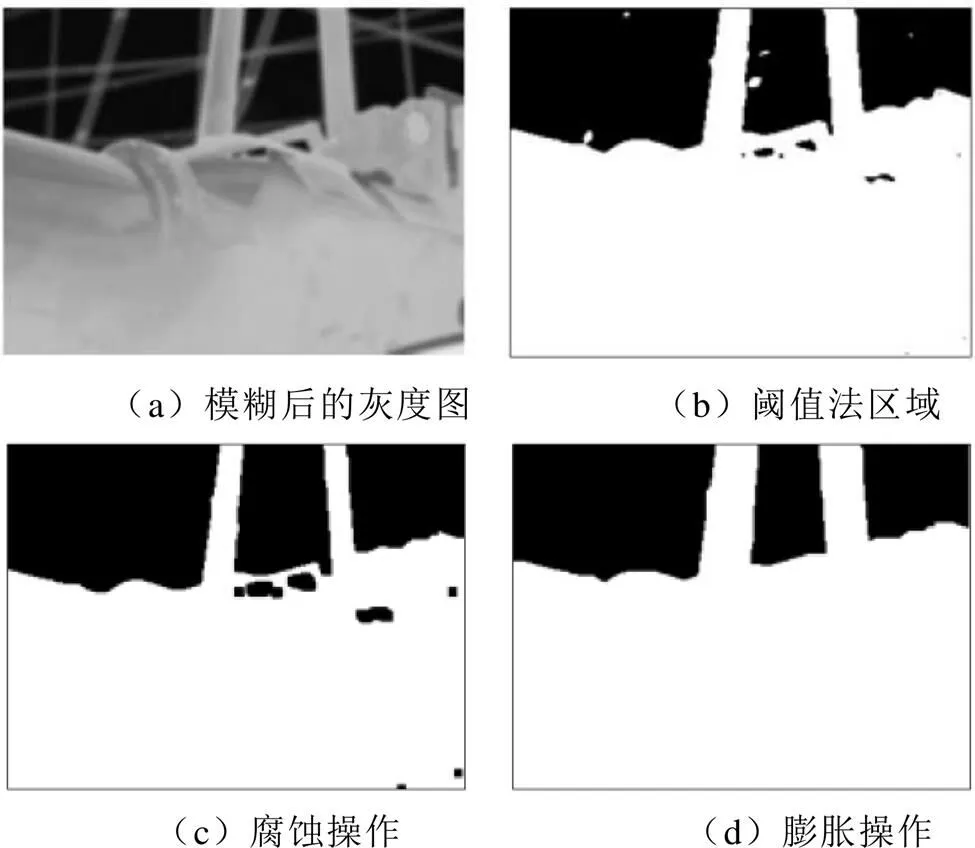
图3 掩膜过程
2 基于累积帧间差分的漏点定位算法
2.1 SF6泄漏红外图像特点及抗干扰分析
SF6气体泄漏在红外视频中是一种局部渐变的运动,其相对位置变化不大,且持续时间贯穿整个拍摄区间。由于变电站的相对封闭性,红外视频可能存在的干扰有飞鸟、附近高楼的灯光、变电站工作人员、摄像机位置的微小变化等。利用泄漏位置相对固定且持续时间长的特性,选用累积帧间差分法可以将这些干扰排除。对于不在设备上的干扰,可以通过图像预处理步骤中的掩膜进行区分。同时,高斯模糊和累积帧间差分法也能有效减少摄像机位置微小变化带来的干扰。
2.2 累积帧间差分法
帧间差分法[13]是一种利用对连续两帧图像进行差分运算得到运动物体轮廓的新算法。在差分操作中,去除不会改变的背景,获得相对移动的区域,并根据该区域和阈值的相对大小来判定该区域的移动特征。通过阈值提取序列图像中运动变化的区域,第帧图像的灰度值I(,)与第+1帧图像的灰度值I+1(,)之间的变化差值可以表示为

式中:(,) 为运动目标在图像中的位置;为阈值。
该方法的编程简单,对光照和其他场景的变化不敏感,能很好地适应各种动态的环境,具有很好的稳定性[14]。然而,传统的帧间差分法只能处理单个帧的差分图,不能反映出SF6泄漏的相对位置和较长的相对位置,而且易被白噪声、脉冲噪声(飞鸟、移动的人、摄像机的自然抖动等)影响。为了提高SF6泄漏的定位精度,本文提出一种累积帧间差分法。
假设100帧是一个测试序列,对输入视频的图像进行帧间差分和差分累加运算,总共执行99次差分操作。因此,累积的图像像素值介于[0, 99]。实验证明,累加图像的门限A以40为宜。累积帧间差分法的计算公式为

式中:(,)为运动目标在图像中的位置;A为阈值;=99;D(,)为第帧和+1帧图像差分;(,)为累积差分;(,)为二值化后的最终结果。
图4为单帧差分和累积帧间差分对比,由图4(b)可见,单帧差分容易受到噪声干扰,而图4(c)的累积差分白色部位相对集中,抗干扰能力较好。
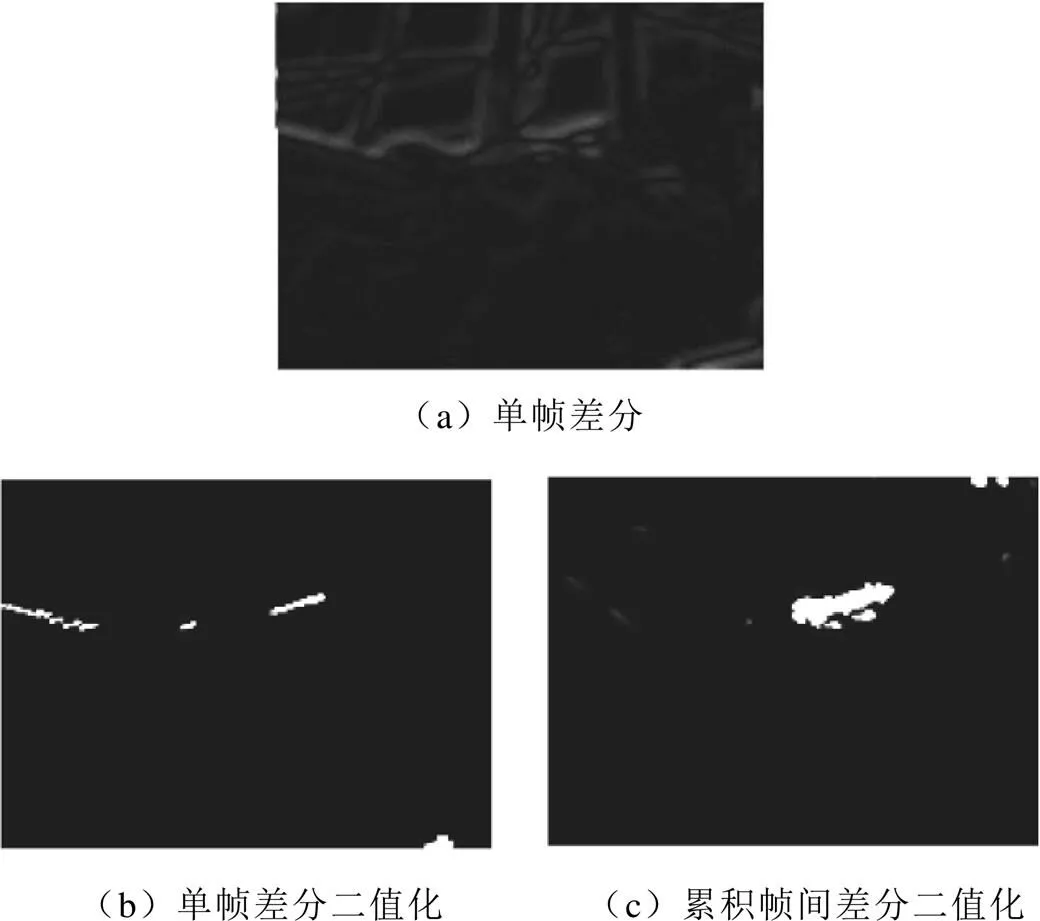
图4 单帧差分与累积帧间差分
2.3 漏点定位及统计
上述所得图像中白色的部位即为可能的漏点区域,为排除非设备区域的干扰,将累加图像与1.3节得到的掩膜进行式(6)所示的与操作,得到在设备区域的漏点区域[15]。

式中:(,)为式(5)累积差分二值化的结果;(,)为1.3节中得到的掩膜。最后使用边缘检测[12]找出图中轮廓,去除较小的轮廓并合并距离较近的轮廓,得到漏点位置并统计漏点个数。程序以100帧图像为一个测试序列,不断重复循环实时定位,单个循环的流程如图5所示。
3 实验验证
实验使用的计算机为CPU i3@2.00GHz,2GB内存,系统环境为Windows7,编程语言Python2.7,图像处理软件为OpenCV3.0.本实验采用FLIR公司的GF306红外探测器拍摄红外视频,帧速为15帧/s,分辨率为320×240。截取五段红外视频,各自进行循环定位,结果均能正确定位。算法的处理性能见表1,由表1处理速度得知,该算法能处理50帧/s的红外视频,满足实时视频处理的要求。

图5 单个循环流程

表1 算法的处理性能
图6为某段视频中的某次循环定位,可以看到图6(b)的累积差分右上方有两处白点干扰,通过和掩膜进行与操作后只留下设备区域内的白色部分如图6(c)所示,最终定位结果如图6(d)所示。

图6 定位案例
运动目标图像定位算法主要分为差分法和光流法[16-17]。光流法运算复杂度高,对帧间位移较大的目标有更好的检测效果;传统的背景差分法运算复杂度低,但无法实时更新背景,容易受到背景突发变化的干扰;本文的累积帧间差分法对光线等场景变化不太敏感,能够适应各种动态环境,稳定性较好。对三种方法的运算速度进行测试,结果见表2。

表2 差分法和光流法运算速度对比
由表2可知,两种差分法处理速度远快于光流法。在准确率方面,光流法对位移较小的目标不敏感,对5段红外视频,可以准确识别出2段视频中的漏点,正确率仅为40%;传统的背景差分法无法实时更新背景,对5段测试视频的准确识别率为80%,但无法识别中途闯入镜头的干扰物;本文的累积帧间差分法对5段测试视频的识别率为100%,且能区分人为设置的中途入镜的干扰物。因此,相比于光流法,差分法更适用于红外检漏视频定位。但由于验证的视频样本数量有限,本文的验证结果有一定局限性。
4 结论
本文根据SF6泄漏点在红外图像中相对位置固定且持续时间长这一特点,提出一种基于累积帧间差分和掩膜的定位方法。通过实验分析,得出以下结论:
1)该方法处理速度快,抗干扰性好,适合实时视频处理,既可用于变电站自动巡检机器人的红外检漏自动定位,亦可用于手持式红外图像检漏仪辅助定位。
2)高斯模糊和帧间差分对消除摄像机抖动的干扰效果明显;设备区域和背景区域划分可以有效区分非设备区的干扰。
3)该方法对视频拍摄的平稳程度有一定要求,大幅度的抖动会造成较大干扰;另外,雨天对该方法的干扰尚未经过实验测试。
4)下一步可以充分挖掘SF6泄漏红外图像的纹理特征、几何特征、动态特征等,使用贝叶斯分类、神经网络等算法来识别这些特征,或许能有更一步的改进。
[1] 刘财明. 气体绝缘开关设备局部放电带电检测综合应用[J]. 电气技术, 2020, 21(10): 117-122.
[2] 潘岩, 章海斌, 马凯, 等. 一起GIS传动失效导致的接地故障原因及分析[J]. 安徽电气工程职业技术学院学报, 2021, 26(2): 36-40.
[3] 陈振生. GIS高压电器SF6气体密度、湿度及泄漏检测技术[J]. 电气技术, 2007, 8(4): 16-20.
[4] 马凤翔, 袁小芳, 程登峰, 等. 基于红外吸收原理的SF6气体泄漏检测技术应用研究[J]. 电气技术, 2021, 22(10): 51-56.
[5] SONG Yifeng, WANG Hongguang, ZHANG Jianwei. A vision-based broken strand detection method for a power-line maintenance robot[J]. IEEE Transactions on Power Delivery, 2014, 29(5): 2154-2161.
[6] 李玉齐, 朱琦文, 张健. 发电厂带电设备红外检测与故障诊断应用研究[J]. 电气技术, 2020, 21(1): 78-82, 85.
[7] 许侃, 高凯, 邓先钦, 等. 极端环境下SF6气体红外热成像检漏技术在GIS带电检测中的效果加强方法研究[J]. 高压电器, 2021, 57(3): 191-197.
[8] 王建平, 李俊山, 杨亚威, 等. 基于红外成像的乙烯气体泄漏检测[J]. 液晶与显示, 2014, 29(4): 623-628.
[9] 肖欣怡. 红外成像气体检漏仪软件设计[D]. 武汉: 华中科技大学, 2019.
[10] 吴春龙, 潘海鹏, 夏永明. 基于光流法的气密性检测装置研究[J]. 机电工程, 2013, 30(8): 947-951.
[11] 杨帆. 数字图像处理与分析[M]. 北京: 北京航空航天大学出版社, 2007.
[12] BRADSKI G R, KAEHLER A. Learning OpenCV[M]. Sebastopol: O’apos; Reilly Media, Inc., 2008.
[13] 李刚, 邱尚斌, 林凌, 等. 基于背景差法和帧间差法的运动目标检测方法[J]. 仪器仪表学报, 2006, 27(8): 961-964.
[14] 包玉刚. 视频图像中的运动目标跟踪算法研究[D]. 哈尔滨: 哈尔滨工程大学, 2010.
[15] GONZALEZ R C, WOODS R E, EDDINS W L. 数字图像处理[M]. 北京: 电子工业出版社, 2009.
[16] 裴巧娜. 基于光流法的运动目标检测与跟踪技术[D]. 北京: 北方工业大学, 2009.
[17] 欧阳玉梅. 基于稠密光流算法的运动目标检测的Python实现[J]. 现代电子技术, 2021, 44(1): 78-82.
Study of an accumulated interframe difference and mask based SF6leakage infrared video location method
HUANG Bo YANG Fan DENG Jianping BI Fan
(Electric Power Test and Research Institute, Guangzhou Power Supply Bureau Co., Ltd, Guangzhou 510410)
Automation and intelligence are the development trend of substation. More and more automatic inspection robots are used in inspection work. Infrared image leakage detection technique is widely used in detecting SF6gas leakage in electrical equipment. It can be used in local leakage searching and large-scale patrolling. Therefore, it is necessary to study the automatic location algorithm of infrared leakage detection. First, gray processing is applied to infrared image and Gauss blur is used to eliminate the noise. Threshold transformation is used to recognize the device area in the first frame image and obtain mask. Then, accumulated interframe difference method is used to get the cumulative changes in infrared images. Finally, the interferences outside the device area are removed, and the leakage points are located. The experiment shows that the proposed method has fast computing speed and good anti-interference ability, which makes it suitable for real-time video processing. This method can be used in both automatic substation patrol robot and handheld infrared image leakage detector.
infrared image; SF6; accumulated interframe difference; mask; leakage location
2022-01-05
2022-05-09
黄 柏(1988—),工程师,从事高压试验和器材检验工作。
