煤矿开采地表沉陷UAV-摄影测量监测技术研究
2022-07-20高银贵周大伟安士凯张德民詹绍奇
高银贵,周大伟,安士凯,王 玲,张德民,詹绍奇
(1.鄂尔多斯市华兴能源有限责任公司,内蒙古 鄂尔多斯 017000;2.中国矿业大学 环境与测绘学院,江苏 徐州 221116;3.平安煤炭开采工程技术研究院有限责任公司,安徽 淮南 232033;4.新能矿业有限公司,内蒙古 鄂尔多斯 017000)
0 引 言
“富煤、贫油、少气”是我国的能源现状,这就决定了煤炭资源在较长时间内始终是我国的主要消费能源和能源战略安全的保证[1]。我国煤炭资源在地理分布上呈现“西多东少”趋势,随着国家供给侧结构性改革、能源战略调整及东部煤矿逐渐关闭,西部地区必将成为我国未来主要煤炭资源产地[2-3]。煤炭开采在满足国家能源需求的同时也导致严重的矿区地质环境损害问题,煤炭开采引起岩层及地表变形是产生矿山地质环境损害的根源。西部矿区地质构造简单,煤层赋存稳定,适宜大规模机械化开采,且由于煤层浅埋,大采高、高强度快速开采及地质环境脆弱,西部煤炭开采引发的地表沉陷大多呈现出变形速度快、损害程度深、波及范围广的特点[4]。由煤炭开采引起的矿区地表沉陷会造成地表建构筑物以及生态环境的破坏,严重时甚至会引发滑坡、泥石流等灾害,对煤矿安全生产以及人们的正常生活产生严重的损害和威胁。矿区开采沉陷监测对合理指导煤炭资源开采活动,保护生态环境不受破坏以及人民生命财产安全具有重大意义。然而,西部矿区地表沉陷监测数据较少,沉陷规律研究不深入,更没有适合的沉陷参数。尤其国家对环境保护要求越来越严格,矿区环境损害监测及评估已经成为西部矿山企业面临的巨大难题。
现有沉陷监测技术是以全站仪、水准测量、GPS等大地测量技术为主的常规地表沉陷监测技术。该监测方法是通过在采空区上方地表布设走向和倾向“十字”观测线进行沉陷监测[5-6],根据各观测站获取的平面坐标和高程信息。该技术监测精度高,是目前获取矿区地表形变最常用、最有效的手段,在矿山开采沉陷研究及实际工程中发挥了重要的作用。然而,该监测手段有如下特点:①监测范围和尺度小,一般以单工作面为监测对象;②仅以地表移动变形为监测内容,无法获得环境损害信息(比如植被、水体等);③成本高、周期长、工作量大、需要埋设测点且难以长期保存等缺点;④只“点状”观测,数据及信息量少,不能完整反映沉陷盆地特征。这些不足导致其已无法适应新形势下西部高强度开采地表损害监测任务,因此如何快速、准确、全面地监测西部高强度大规模开采引起的地表沉陷与环境损害是解决问题的关键。
随着近年低成本、轻型无人机与技术的发展,以无人机为搭载平台的无人机低空摄影测量技术(Unmanned Aerial Vehicle,UAV)成为当前应用较广泛的测绘新技术。UAV摄影测量是以无人机为平台,集成高分辨率(多/高光谱)低空光学传感器、GPS和IMU等技术,可同时获取地表沉陷变形和地物环境信息,适应于多尺度的监测任务,具有机动灵活、高效精准、作业成本低(突出的时效性和性价比)等优势[7-8],极大推动了摄影测量技术在矿区的应用[7,9-11]。基于此,笔者以内蒙古鄂尔多斯某煤矿为研究对象,提出了UAV摄影测量监测矿区地表沉陷的思路、关键技术流程和方法、采用UAV摄影测量技术对该矿区地表沉陷进行监测,采用常规全站仪/水准测量数据进行对比研究,分析了UAV摄影测量监测精度,讨论分析该技术在西部矿区高强度开采地表沉陷监测的可行性。
1 无人机监测思路及方法
1.1 基本思路
UAV-摄影测量可以定期快速获取监测区域地表光学影像数据,该影像含有地表三维坐标和丰富的地物光谱信息数据,通过对影像数据的处理可以得到监测区域的地表数字高程模型(Digital Elevation Model,DEM)和生态环境信息(如植被、土壤及水体),前者通过多期DEM相减可以进一步处理得到地表沉陷变形,后者通过多期地物对比分析,可用于研究矿区生态环境精细演变。
图1为UAV-摄影测量监测地表沉陷的示意,当工作面推进到位置1时,利用UAV观测一次地表,解算得到当时的数字高程模型DEM1。当工作面推进到位置2时,再用对同一位置地表进行第二次观测,获得该时刻的地表数字高程模型DEM2。通过两期DEM相减,即DEM1减去DEM2,可以得到监测区域的地表沉陷盆地,如若2次监测是采动过程中进行的,获得的即为动态沉陷盆地;如若为工作面开采首末2次监测,获得的即为稳态沉陷盆地,再根据工作面开采的相关信息,便可以反演出地表移动变形预测参数等。
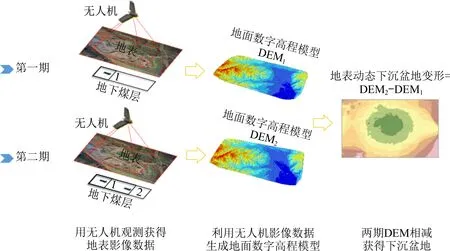
图1 无人机摄影测量技术监测地表沉陷思路Fig.1 Monitoring surface subsidence by UAV photogrammetry technology
1.2 DEM构建方法及流程
UAV-摄影测量技术通过对航测数据进行处理得到同一监测区域不同监测时期的DEM,多期DEM相减获得监测区域的地表沉陷。DEM的构建是生成地表沉陷盆地的关键步骤,DEM构建流程如图2所示。首先,利用无人机控制平台规划航飞路线并获取监测区域的影像数据;再进行相机标定获得相机畸变参数,并利用该参数对原始影像进行畸变校正;然后,对校正后的影像进行相对定向,使所有像片统一至选定的像空间辅助坐标系中;随后,再利用外业测量获取的像控点数据进行绝对定向,使像片由像空间辅助坐标系转换至地面坐标系;最后,通过光束法区域网平差以及影像密集匹配加密点,获取整个监测区域的点云数据,再通过空间内插构建DEM[12-13]。其中,构建DEM的关键技术如下:
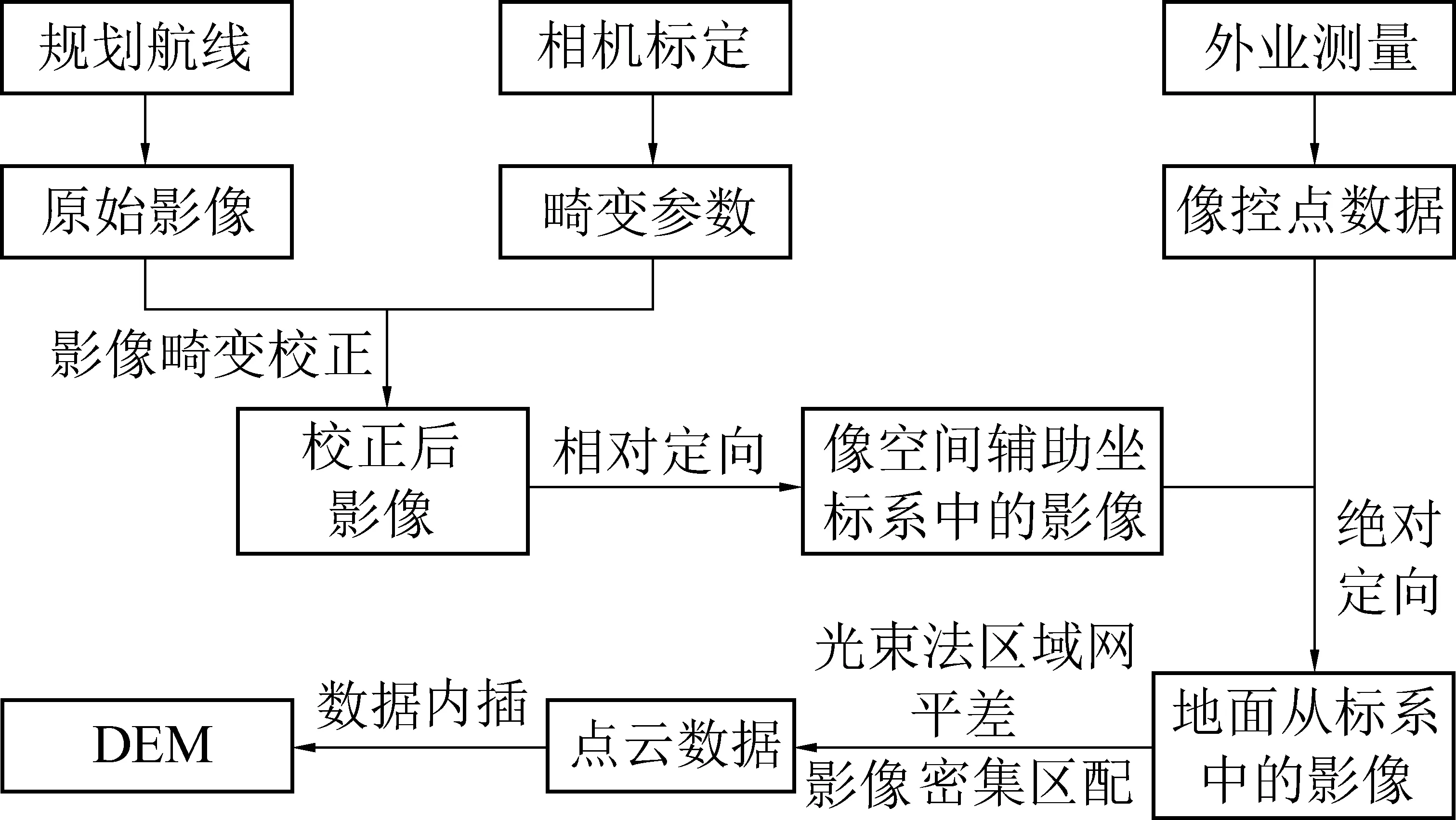
图2 DEM构建流程Fig.2 Flow chart of DEM construction
1)影像畸变校正:无人机低空摄影测量携带的相机大多为非量测型相机,获取的影像存在畸变差,因此在进行影像数据处理前必须消除畸变差。通过调整像主点位置和纠正畸变参数来实现影像畸变校正。
2)相对定向:在2张具有一定重叠度的相邻影像上提取相似的特征点,然后利用基于灰度或者特征的匹配算法进行同名点匹配,相对定向后监测区域所有影像的坐标系统一至以像空间辅助坐标系为基准的自由坐标系中。
3)绝对定向:引入像控点数据,解算每张像片在控制点坐标系下的外方位元素和待定点的地面坐标,完成影像由自由坐标系统一至地面坐标系。
4)光束法区域网平差:以每张像片组成的光束为平差基本单元,按照共线条件方程列出误差方程,对测区整体进行平差处理获取每张像片的外方位元素以及待求点的地面坐标。
5)影像匹配:寻找2幅或多幅影像之间的同名点,主要方法为基于点特征的匹配,包括SIFT、SURF、Harris-Laplace算子等算法。
2 矿区工程案例
2.1 研究区域及数据采集
试验区域为位于内蒙古自治区鄂尔多斯市的某煤矿2S201工作面。该工作面倾向长度260 m,走向长度1 253 m,煤层厚2.9~3.7 m,实际平均采厚3.17 m,煤层总体倾向西南,平均倾角2°,煤层平均采深约200 m。
采用天宝UX5无人机摄影测量系统进行数据采集,无人机相关参数见表1;外业像控点数据由GPS RTK测量完成,像控点测量坐标系为北京54坐标系,数据采集现场如图3所示。

图3 现场采集数据Fig.3 Field data acquisition
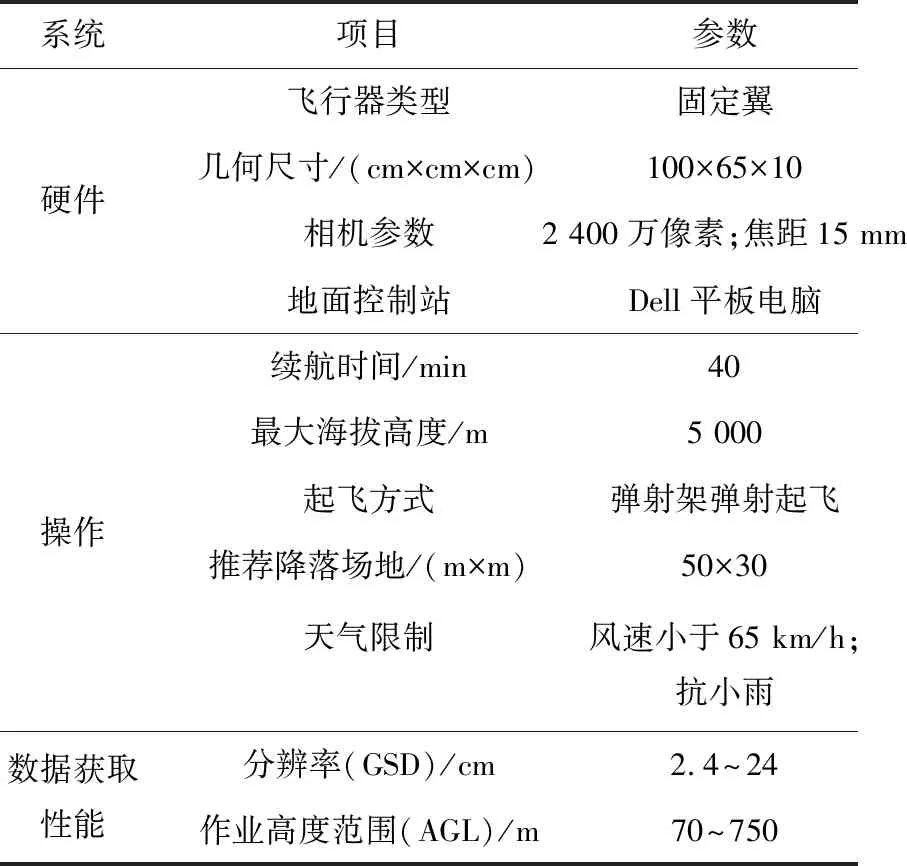
表1 天宝UX5无人机航测系统参数Table 1 Parameters of aerial survey system of Tianbao UX5 UAV
两期数据分别采集于2018年6月9日、2018年9月4日,第一期和第二期无人机影像均为560张,相对地面平均航高为250 m左右,设计为东西航向,航带为28条,考虑到本试验所用无人机平台较轻、稳定性差和抗风能力弱的特点,设计的航向和旁向重叠率均为80%,见表2。
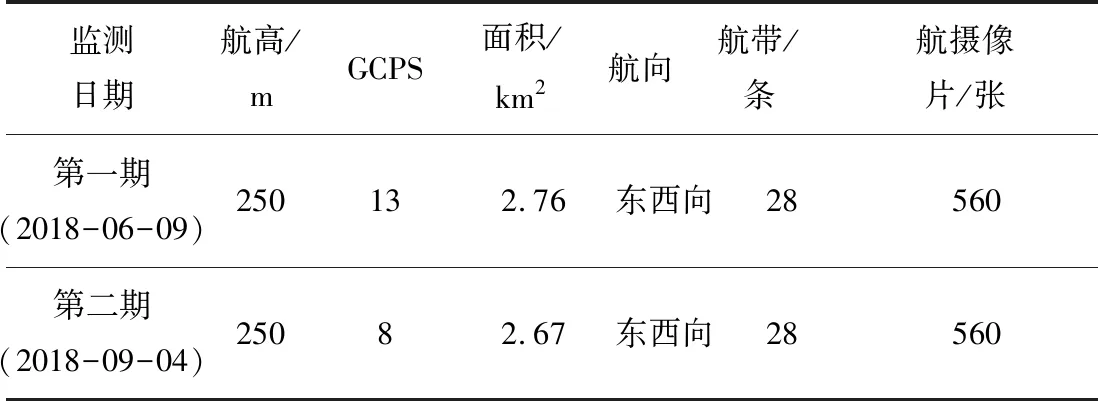
表2 无人机影像数据信息Table 2 Information of UAV images
2.2 数据处理及精度分析
2.2.1 数据处理及结果
根据前述无人机摄影测量监测地表沉陷的基本原理,首先构建DEM,分别将外业无人机平台采集的2期影像数据以及GPS RTK采集的像控点数据导入PhotoScan软件中,进行初始预处理剔除掉部分扭曲或模糊的照片,然后对齐照片;然后进行影像匹配获取影像的同名点坐标,并剔除误匹配点;利用少量的外业像控点数据在像片上刺同名点,进行辅助GPS光束法区域网平差以获取高精度的姿态数据;最后进行密集匹配、SfM摄影测量等处理,建立实验区域的密集点云数据,再经过规则格网内插获取数字正射影像(DOM)和数字高程模型(DEM),如图4和图5所示。
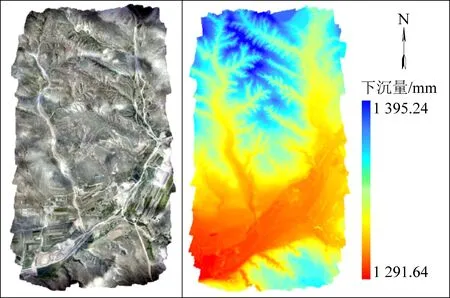
图4 第一期DOM图像(左)和DEM图像(右)Fig.4 DOM (left)/ DEM (right)of phase I
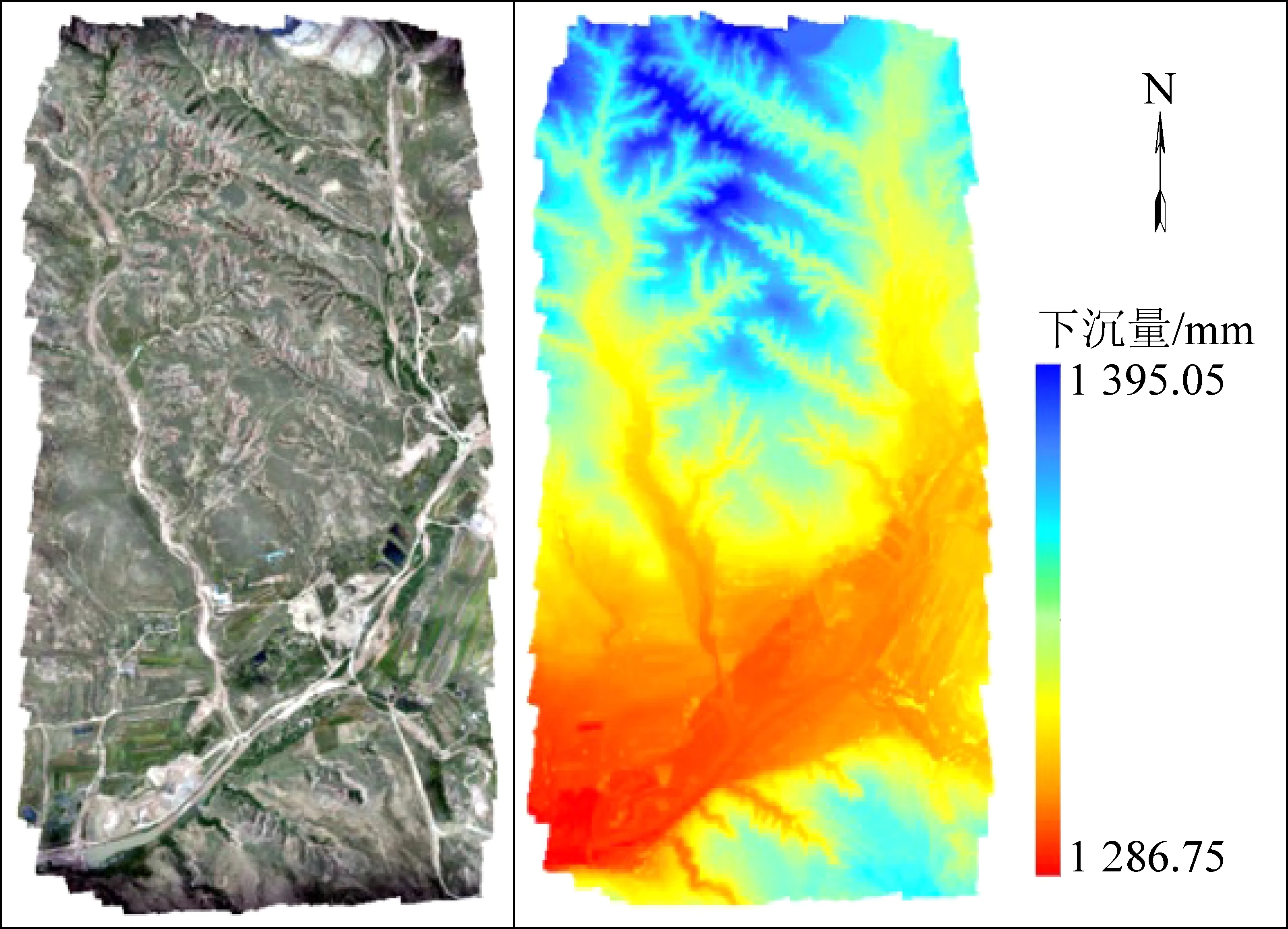
图5 第二期DOM图像(左)和DEM图像(右)Fig.5 DOM (left)/ DEM (right)of phase Ⅱ
然后对利用ArcGIS软件对2期DEM进行相减,得到无人机摄影测量监测的某煤矿2S201工作面从2018-06-09至2018-09-04间的地表沉陷,最大下沉值为2 487 mm,如图6所示。
2.2.2 DEM及沉陷盆地精度分析
为分析无人机摄影测量技术监测矿区地表沉陷的精度,采用全站仪和水准仪于2018年6月和9月分别对布设的15个地面测站点进行测量(地面测站点分布情况如图6所示),得到两个时期的各地面观测站的平面坐标和水准数据,并与无人机数据生成的DEM和沉陷盆地上对应点的高程和沉降值数据分别进行比较。
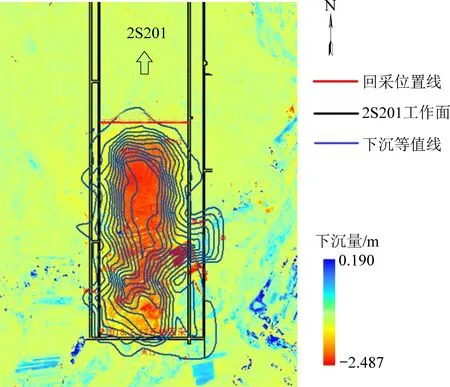
图6 无人机摄影测量监测的沉陷盆地Fig.6 Subsidence basin monitored by UAV photogrammetry
1)DEM精度评价。根据全站仪测量的地面测站点的平面坐标,利用利用ArcGIS软件提取DEM上对应坐标点的高程。两期DEM高程与地面观测站水准高程对应比较,见表3和表4。
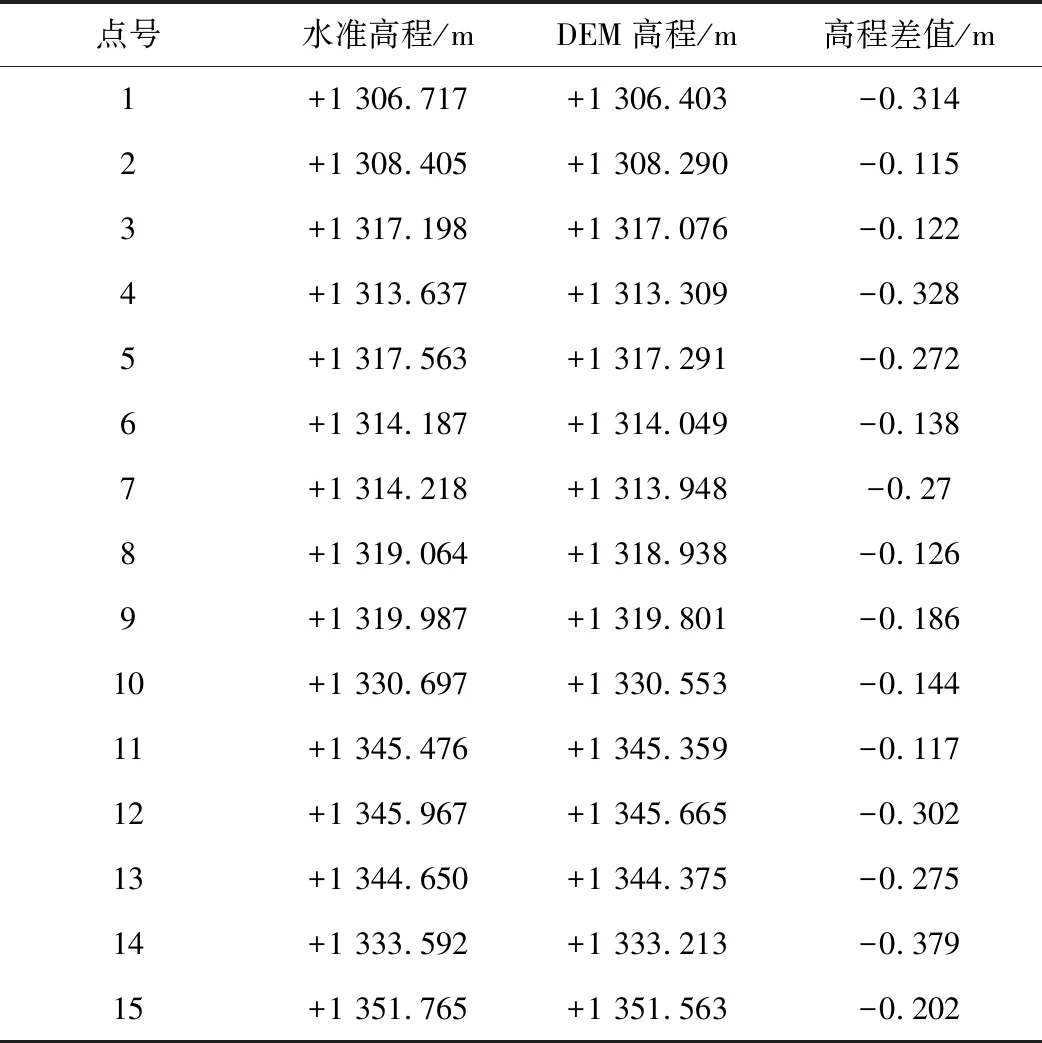
表3 第一期DEM的误差统计Table 3 Error statistics of first period DEM
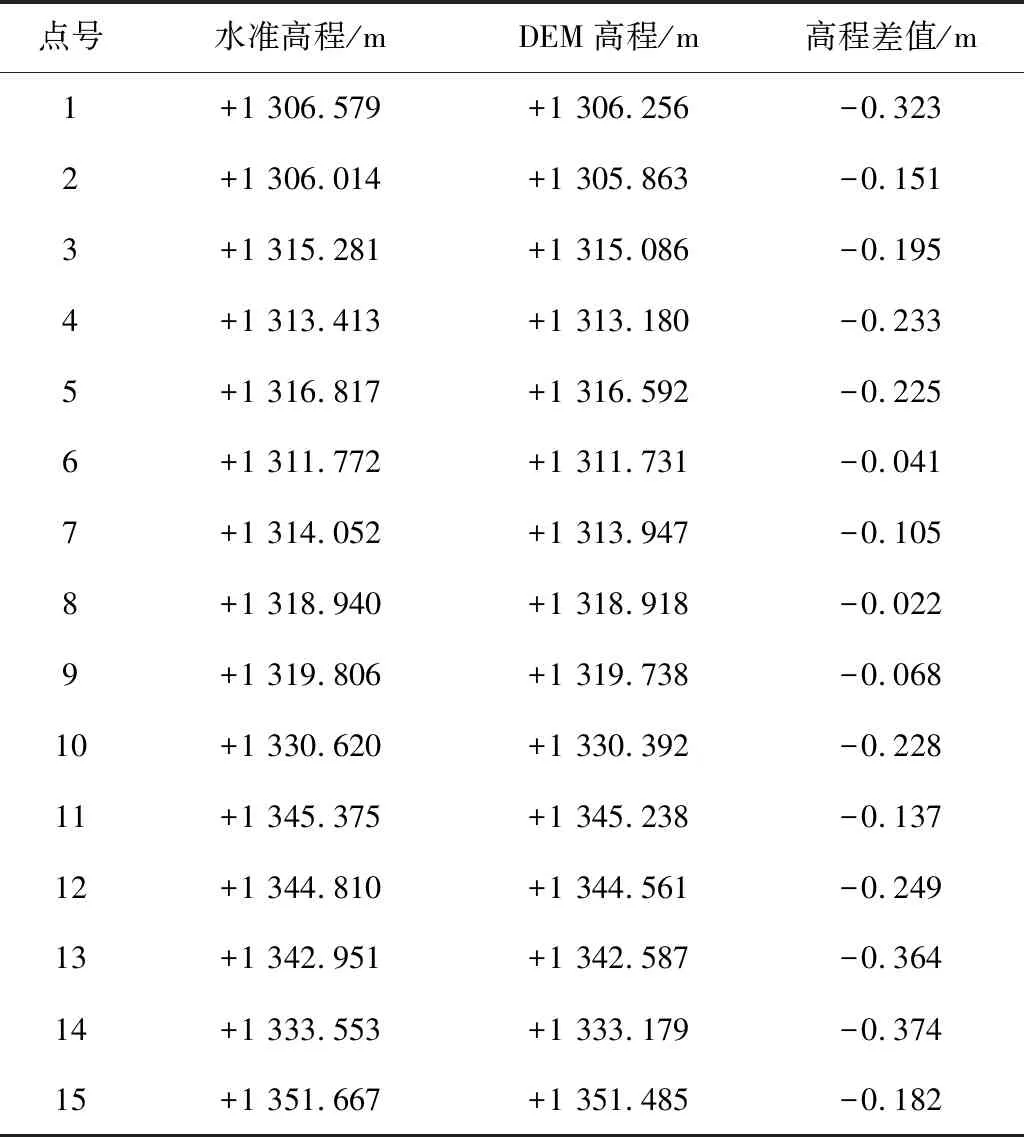
表4 第二期DEM的误差统计Table 4 Error statistics of second period DEM
通过对地面观测点和DEM对应点的高程差值的均方根误差进行计算,以此评估DEM的精度,均方根误差计算公式为
(1)
式中:M为均方根误差(即中误差);Δi为高程差值;n为实测点数量。
由上表数据计算可得,第一期和第二期的DEM的高程均方根误差分别为0.236 m和0.220 m,两期DEM的平均高程均方根误差为0.228 m。
2)沉陷盆地精度评价。将2期水准高程相减得到的下沉值与2期DEM相减得到的沉陷盆地上相应的下沉值作比较,见表5,得到下沉中误差为0.081 m。
由表3—表5数据可以看出,无人机监测的下沉值在14、15号点的相对误差较大,主要由于该位置处下沉量小为厘米级,无人机监测精度无法达到要求,因此误差较大;而7~11号点处则由于一些非采动因素(农民挖沙子)的影响,造成较大误差。
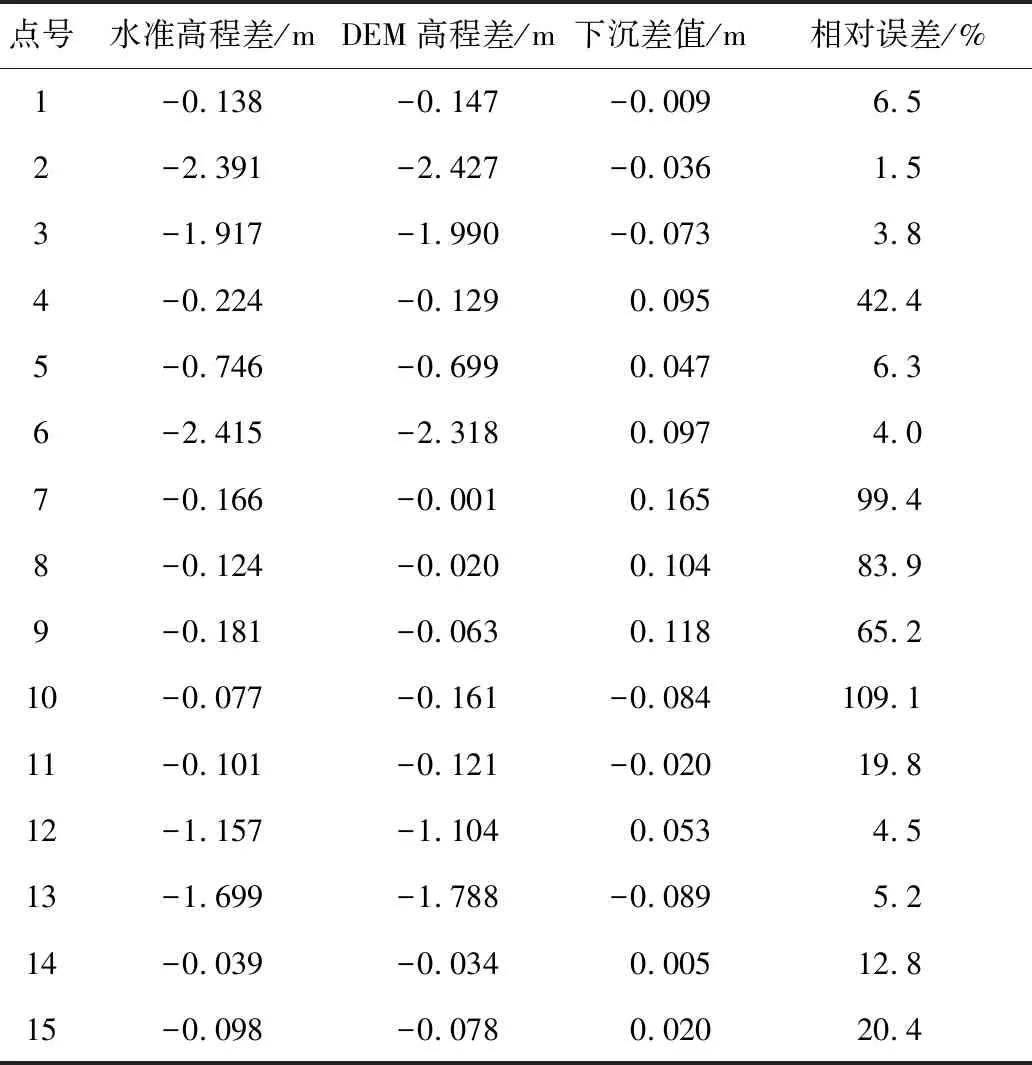
表5 沉陷盆地误差统计Table 5 Error statistics of subsidence basin
对下沉差值的均方根误差进行计算,以此评估沉陷盆地的精度,均方根误差计算公式同式(1)。
根据表5中数据计算可得,沉陷盆地的下沉值中误差为0.081 m。由于无人机DEM误差中,系统误差影响较大,造成无人机DEM的精度较低,而无人机监测的沉陷盆地是由2期DEM相减获得,消除了系统误差的影响,使其只含随机误差,故无人机摄影测量解算的沉陷盆地的精度相对较高。
2.3 UAV-摄影测量监测矿区沉陷可行性
由上述精度分析可知,本次试验中的UAV求取的下沉盆地精度为81 mm,就单个点的精度而言,不满足矿区开采沉陷变形监测精度10 mm的要求而无法直接用于矿区地表沉陷监测,尤其在对建筑物损害鉴定时,需要观测沉陷盆地边界的微小变形(监测精度为毫米级)。然而,矿区沉陷监测的另一个核心作用是求取概率积分参数,与传统沉陷监测技术的线状观测站不同,UAV摄影测量技术获取的是整个面域的沉陷值,10 mm的精度要求是针对常规的单个点而言的,尽管单点监测精度不高,但利用面域内大量的沉陷数据求取的预计参数具有较高的精度,以此对整个地表沉陷进行预测,可以得到比较可靠的结果。
根据文献[14]中的测量误差对开采沉陷预计参数的影响分析结果可知,以测量中误差和最大下沉值之比作为衡量标准,比值<7%时求参结果可靠,比值>10%时求参结果不可靠,比值在两者之间时求参结果部分可靠。根据计算可知,无人机监测的某煤矿2S201工作面的测量中误差81 mm与最大下沉值2 487 mm的比值为3.3%,因此认为此次反演求取的沉陷参数是可靠的。由于2S201工作面在2018-6-9—2018-9-4的开采引起的地表沉陷需持续一段时间才能停止,尚未形成稳定的沉陷盆地,且此后工作面仍需继续推进,因此此期间形成的沉陷盆地为“动态沉陷盆地”。故对该期间的沉陷数据利用概率积分法的稳态预计模型和时间影响函数(Knothe时间影响函数)进行动态求参。对UAV监测数据与传统水准测量获取的沉陷数据的求参结果进行对比,见表6,可得,下沉系数相对误差为1.4%,主要影响角正切相对误差为20%。

表6 开采沉陷预计参数反演结果Table 6 Inversion results of mining subsidence prediction parameters
利用求参结果进行预计得到拟合下沉值,实测下沉值与拟合下沉值的中误差(即拟合中误差)应满足小于10%W0(W0为最大下沉值)的要求,否则求出的参数结果将会不可靠。此外,拟合中误差与测量中误差成正比,测量中误差越大,则拟合中误差也越大。拟合中误差计算公式为
(2)
式中:v为实测下沉值与拟合下沉值的差。
根据上表中数据计算得,无人机数据求参结果的拟合中误差为181 mm,占最大下沉值2 487 mm的百分比为7.3%,故认为该求参结果相对可靠;而水准测量的测量精度高于无人机测量,故水准数据求参结果也可靠。
由表6中的对比结果可以看出,由无人机摄影测量获得的沉陷数据反演得到的下沉系数是可靠的;而由于无人机监测沉陷盆地边界误差较大,导致求取的主要影响角正切值偏小。因此无人机摄影测量技术可应用于矿区开采沉陷监测,并可求取可靠的下沉系数。
矿区生态环境监测以及后续的生态修复和土地复垦等也是矿区沉陷监测的主要目的之一,无人机摄影测量技术以其低成本、高灵活度、高效率等优点,通过数据处理获取高分辨率地表DEM和全盆地沉陷数据以及大比例尺地形图,为复垦规划提供了基础信息[15]。此外,获取的海量的光学影像数据可以提取矿区地表植被信息,为研究煤矿开采引起的矿区生态环境变化提供支撑,弥补常规监测手段仅能获得地表沉降数据的不足。
3 讨论及建议
1)煤炭开采引起岩层及地表变形问题在生态环境极其脆弱的西部地区尤为突出,严重影响和制约了煤矿企业的可持续发展和人民的健康生活[2]。目前常规地表移动观测站布设在工作面主断面上,由“点”组成“十字形”观测线,具有尺度小、工作量大、数据及信息量少等不足。在西部浅埋深、大采高、快速综合机械化及智能化的大规模、高强度开采已成为主流下,开采引起的岩层及地表移动呈现出损害面积大、程度深、波及范围广的特点。常规地表移动观测站已无法适应新形势下的开采损害监测任务;UAV摄影测量为解决上述问题提供了新的技术途径。UAV摄影测量以无人机为平台,可快速获取含有丰富的地物光谱信息的光学影像,具有机动灵活、高效精准、作业成本低(突出的时效性和性价比)等优势;通过研究,UAV摄影测量可以快速获得“面状”全盆地沉陷数据,并可反演可靠的沉陷参数,可为矿区生态环境监测以及后续的生态修复和土地复垦提供丰富数据。
2)对UAV摄影测量获得的DEM以及沉陷盆地的精度进行评估,得到UAV监测的矿区地表DEM高程中误差为228 mm,主要误差来源于无人机平台较轻易受天气因素影响而导致影像质量差,影像畸变大以及无人机飞行姿态不稳定,这些误差包括系统和偶然误差;沉陷盆地通过DEM相减,消除了系统误差的影响,沉陷盆地的精度为81 mm(即为厘米级精度),比DEM高程精度提高了64.5%;因此,无人机监测矿区大变形具有显著优势,但无法准确监测沉陷盆地边界区域小变形。就单个点的精度而言,无人机摄影测量监测精度不满足要求;然而,从开采沉陷参数反演的角度来说,与水准测量求参结果相比,无人机摄影测量获得沉陷数据求取的下沉系数相对误差较小,仅为1.4%,由于UAV获得下沉盆地边界误差较大,求取的主要影响角正切相对误差为20%,误差偏大。UAV摄影测量的不足之处在于:①无人机平台较轻、摄影姿态不稳定(影像旋偏较大);②飞行高度低、影像几何畸变大;③航摄影像重叠度不规则等方面的缺陷,导致UAV摄影测量的高程测量精度相对较低。根据实测结果,平均高程精度为228 mm(即为分米级精度)。UAV监测矿区开采沉陷大变形具有优势,却无法准确获得沉陷边界区域数据,这也导致其反演的参数主要影响角正切误差较大的原因。
3)尽管无人机摄影测量技术在矿区地表沉陷中存在些许不足,但其监测得到的高分辨率影像以及处理生成的各数字产品对于矿区生态环境监测具有重要作用。为推广无人机摄影测量技术在矿区中的应用,需提高其监测精度,可以通过传统观测站与无人机摄影测量技术联合监测的方法;根据文献[16]中测点缺失对地表移动参数的影响的研究可知,重要观测点(如最大下沉处、拐点附近等)对概率积分法参数的确定起决定性作用,为弥补无人机摄影测量技术存在的缺陷,可以将观测站布设在矿区地表最大下沉处、拐点附近以及盆地边界;将观测站数据与无人机数据联合处理,既可得到完整可靠的沉陷盆地,又能可靠地求得开采沉陷预计的各参数。此外,随着无人机制造工艺、机载定位、视觉算法等技术的创新,无人机摄影测量技术正趋向于智能化和自动化发展[17];研制高效锂电池、太阳能电池、无人机群体化协同作业等方法提高了无人机的续航能力,使无人机摄影测量技术更能适应于矿山的大规模监测;无人机与相机设备的进步,使由无人机平台不稳定、影像畸变等问题造成的误差可以减小。
4)除了提到的常规测量技术和UAV摄影测量外,目前地面三维激光扫描技术,InSAR技术也被应用矿区地表沉陷监测中。然而,地面三维激光扫描技术虽然可以获得大量空间点云信息,从而构建三维模型[18-21],但其监测成本高且需多次迁站,不具有灵活性;InSAR技术可全天时、全天候连续监测,且监测成本低[22-24],但时空相位失相干阻碍了它在矿区地表沉陷监测中的推广应用[25]。而无人机摄影测量技术以其成本低、监测范围广、灵活度高、可连续性监测等优势,逐渐在矿区地表沉陷监测中被广泛应用。随着测绘新技术的发展,多种技术融合,多源数据融合是开采沉陷监测的发展趋势,通过多技术融合可以充分发挥各自优势,扬长避短获得更高精度的全盆地沉陷数据,可以精细化研究地表盆地变形。通过多源数据融合即可以获得地表变形,又可以精确获得矿区生态环境及其变化,为矿区生态修复、环境评价及后评价提供高精度丰富的基础数据。
4 结 论
1)分析了西部大多数矿区煤层浅埋,大采高、高强度快速开采引发的地表沉陷呈现变形速度快、损害程度深、波及范围广的特点。常规观测站的不足导致其已无法适应高强度开采地表损害监测任务。在这种形式下,如何快速、准确、全面地监测西部高强度大规模开采引起的地表沉陷与环境损害是解决问题的关键。提出采用无人机摄影测量技术,给出了无人机摄影测量监测矿区开采损害的思路和方法,并以内蒙古鄂尔多斯某煤矿为例进行了应用研究,结果表明无人机摄影测量技术可以获取“面状”全盆地数据并反演出稳定可靠的参数,具有简单、高效、快速的特点,弥补了常规监测方法的不足。
2)以某煤矿为研究对象,利用无人机摄影测量技术获取地表影像数据,得到监测区域高分辨率的DEM数据和沉陷盆地。通过与全站仪/水准测量的地面观测站数据对比,对无人机DEM和沉陷盆地的精度进行评估,精度分别为228 mm和81 mm,基于精度分析结果对无人机摄影测量技术监测矿区地表沉陷的可行性进行分析,得出其在开采沉陷预计参数反演中,可以求得较为可靠的下沉系数;获取的大量影像数据可以为矿区生态环境监测以及后续的生态修复和土地复垦提供基础数据。
3)无人机摄影测量技术作为一种新技术应用于煤矿开采地表沉陷中,具有监测成本低,耗时短等优势,结合某煤矿研究实例来看,其监测精度81 mm达厘米级,但对于单点精度来说尚待提高,可对其误差源进行分析以改善其精度,使之在煤矿开采沉陷监测中得到推广应用。
4)讨论分析了无人机摄影测量及现有监测手段的优缺点,建议采用传统观测站与无人机摄影测量技术联合监测的方法,可以得到更为精准的沉陷盆地信息和参数。随着测绘新技术的发展,多种技术融合发挥各自优势,多源数据融合进行精准矿区生态环境损害监测是开采沉陷监测的发展趋势。
