船闸扩建项目三维扫描及BIM技术的融合应用
2022-07-18邵成志
邵成志
(华建数创(上海)科技有限公司,上海 200070)
1 背景
随着我国经济社会向环境友好、资源节约转型发展战略的实施,内河水运节能、经济的优势逐渐增现,全社会对水运需求日益增长,因此需着力完成高等级航道的贯通、解决枢纽通航建筑物的碍航问题,而其中针对老船闸改造工程的新老船闸衔接更是主要技术难题。
我国许多天然河流水运主通道,在过去几十年中,部分已建的航电枢纽在水电梯级开发的同时兼顾水运发展不够,其中大多数具有通用航道建筑规模小、等级低等情况,同时部分的渠化梯级之间有着航深不够、通航水位不衔接等现象,特别是在枯水期,受发电调度等各种原因影响,上下枢纽末端的水位无法完全连接,导致航行障碍和中断等情况[1]。
老船闸由于建造年代长,所以需要对其进行修凿改造,而大面积高密度的立面测量则有较大的难度,并且相关的图纸和测量资料相对不足,利用三维激光扫描与BIM技术则可有效解决。其能够实现大范围快速的表面勘测,并进行逆向BIM建模,测量和还原老船闸内表面三维几何形体、留存历史影像,为船闸衔接生成可靠数据[2]。
本文依托富春江船闸扩建改造工程,结合激光扫描与BIM技术,探讨分析老船闸修凿前后数据对比,统计改造前后工程量大小,为老船闸施工方案模拟提供模型基础,能够直观地对改造方案的有效性进行比较,不仅节省人力测量时间和成本,而且还能为项目管理提供可追溯的基础信息资料。
2 项目概况
富春江闸扩建改造工程,是在原有船闸的下游重新建造的一座四级标准船闸,位于钱塘江中下游,距杭州市下游约110 km,在桐庐县富春江水电站枢纽的右岸。考虑到钱塘江航运的长期发展战略,船闸的设计不仅保留了原有的船闸,还考虑到了1 000 t级船舶的要求,并且积极响应国家号召,打造顺畅、高效、安全、绿色的现代化内河水体。新船闸的上船闸头与原船闸的下船闸头首尾相连,新船闸左结构外缘与旧船闸齐平,以减少对溢洪道泄洪的影响[3]。船闸右侧墙后水域回填后作为船闸现场管理区。
新建船闸的总长为364 m,其中闸室长度为300 m,上闸首长度30 m,下闸首长度34 m;闸室的总宽度为23.2 m,下闸首口门宽度23.0 m,上闸首口门宽度为14.4 m。船闸左侧为枢纽的泄洪闸,因此闸室只能采用不对称宽腹型,即向右侧加宽8.6 m。上闸首与上游引航渠道相通,道闸室壁顶高程25.0 m,道闸室壁胸顶高程为26.2 m。富春江船闸最大水位落差20.21 m,整个船闸结构高度32.8 m,是目前浙江省水域范围内水位高差最大、建设规模最大的船闸工程[4-5]。
3 老船闸激光扫描方案
为了保证测量和检测的准确性,现场使用了先进的测量设备,从设备和设备配置上保证了测量和测试工作的质量。测量仪器和设备的详细参数如表1,表2所示。

表1 测量仪器设备

表2 FARO三维激光扫描仪参数情况
3.1 现场测量方案
科学设置扫描位置,对于提高三维测量数据的质量、测量精度及充分反映场景细节具有非常重要的意义。由于老船闸总长较长,约为130 m,现场摆放施工器械较多,必须多角度架设测量站才能全方位获取完整数据。
在设置被测目标多站扫描时,为了提高后期操作的效率及数据拼接的准确性,在两个相邻站之间部署至少2个公共参考球作为定向目标,其坐标将被统计到项目的统一参考坐标框架内。除了参考球之外,还需要将控制点和特征点放置在周围结构清晰可见的位置。
3.2 现场点云采集
老船闸激光数据采集分两阶段进行:
1)原始内壁结构面采集。在施工开始前,现场实测旧船闸的闸室内壁的原始磨损表面数据,保存原始记录,并为后续施工提供数据支持。
2)凿除后内壁表面数据采集。在船闸磨损面凿除工作完成,结构补强未开始浇筑前,现场采集凿毛面点云数据,并对新船闸的主体和下游引航通道也进行了点云数据三维扫描,记录和分析凿除完成面的详细情况。
3.3 内业点云数据处理
3.3.1 数据拼接
由于被测物体形状复杂、面积大,需要将不同站点多次扫描得到的点云数据进行拼接,统计在同一坐标系下,根据预先安排的扫描参考球和控制点进行匹配,在后续处理软件场景中手动配准,从而获得闸壁的完整点云数据。
3.3.2 数据删选
在三维数据中,如周边杂物,工程施工人员等大量其他数据也被3D激光扫描仪采集,在经过多站数据的拼接后,大概率会存在大量的冗余数据。这些无效的数据会加大计算内存,从而降低数据处理效率,因此在不损失数据准确性的情况下,需要对数据进行过滤,并对原始观测值进行粗差剔除。数据匹配后,在处理过程中进行冗余处理并删除附件,可以减少数据存储并提高数据处理速度[6]。
3.3.3 去噪处理
扫描测量的过程中会产生一些测量误差,主要是受被测物体表面质量的粗糙度、测量仪器的自身精度、周围作业环境、操作人员的工作经验等多种因素的影响,从而在数据中形成噪声点,这将会给后期的数据处理带来偏差, 所以必须对这些噪声点筛选剃除。去噪后,每个站点扫描的3D点云数量可以在200万~600万点之间,这样的数量区间既可以满足被测目标的特征表达,又不会因为数据体量过大而造成后续分析处理的冗余。经过一系列的技术处理,即可以得到数据质量相对较高的点云(见图1)。
4 三维扫描与BIM技术集成分析在旧船闸中的应用
4.1 数据分析方案
4.1.1 不同点云数据之间对比分析的实施困难
若对整个船闸的凿除偏差进行分析,需要将凿除前后的点云数据进行比对,虽然点云数据可以通过点云处理软件重构目标,还可以在Revit中生成二维或三维视图,但是这样生成的点云模型只是一个个三角网格组成的复杂曲面的封闭集合体,并不是真正的实体模型,因此点云之间无法进行对比。

通过使用诸如Qualify(是一种反向检测软件,可以快速检测产品计算机模型与制造零件之间的差异,并以直观的图形比较显示两者之间的差异)之类的点云处理软件,点云可以被处理为点云面型模型。但是生成的点云面型模型没有厚度,不是空间实体,一样无法直接、直观地进行偏差对比[7]。所以此方案无法推行。
4.1.2 解决方案——与BIM技术的融合应用
在进行偏差对比时本文的论证方案是依据设计图纸建立一个BIM模型,通过这个模型提前模拟凿除后的船闸实况。先将凿除前扫描的点云与设计凿除后的BIM模型对比,以提前演示船闸凿除情况,估算凿除船闸的体积,避免施工时出现较大的偏差。凿毛工作完成后,再次进行激光扫描,将凿毛船闸扫描的点云与设计模型进行对比,验证偏差结果,从而控制施工进度、监督船闸工程的施工质量[8-9]。
4.2 凿除前点云与设计凿除后模型数据对比
通过Revit,将设计的凿除后老船闸的情况,预先以三维形式展现出来,从而形成凿除后老船闸的BIM模型(见图2,图3)。同时,将凿除前老船闸的点云数据与设计凿除后老船闸的BIM模型进行比对,预先估算待凿船闸的体积,从而避免了施工偏差带来的时间和资金浪费等问题。
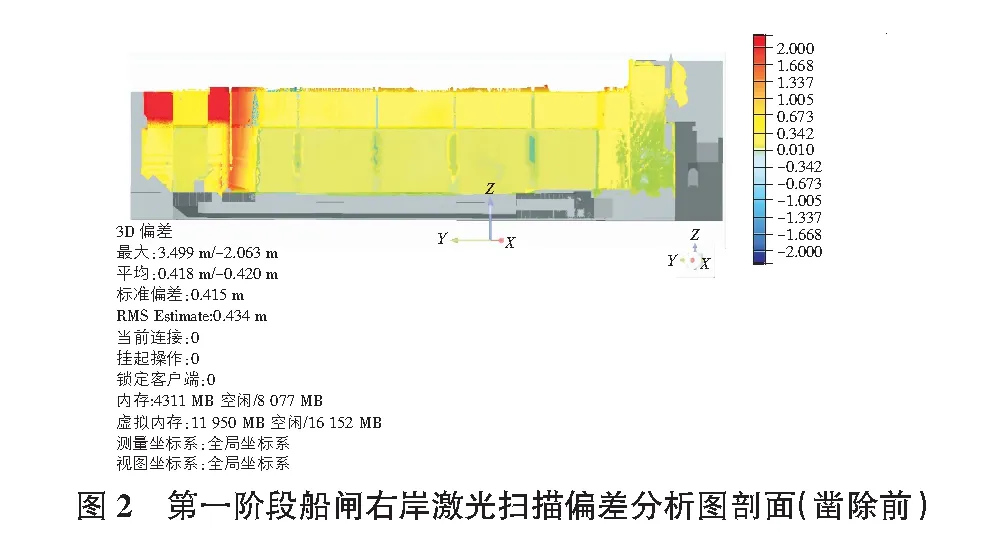
在整个船闸三维扫描过程中,偏差分析和对比表明,凿除偏差约为415 mm,最大凿除值为2 m。其中补充缝隙的平均值约在350 mm,在凿除前的船闸右岸扫描的点云中可以看出,自上闸首往下颜色大致呈递进加深的趋势,在凿除前左岸的船闸激光扫描中,大致呈均匀分布(其中间隔均匀的略深色条形状区域属于干扰因素)。

4.3 凿除后船闸扫描点云与设计模型对比
在凿除工作完成后,对船闸再次进行激光扫描,此时生成的点云数据也同样是经过处理后的点云成果(见图4),将其再次与设计凿除后的老船闸BIM模型进行比对,观察船闸凿除的情况,计算偏差数据是否合理,以此保证工程的施工质量,实现对工程的质量管控和监督。
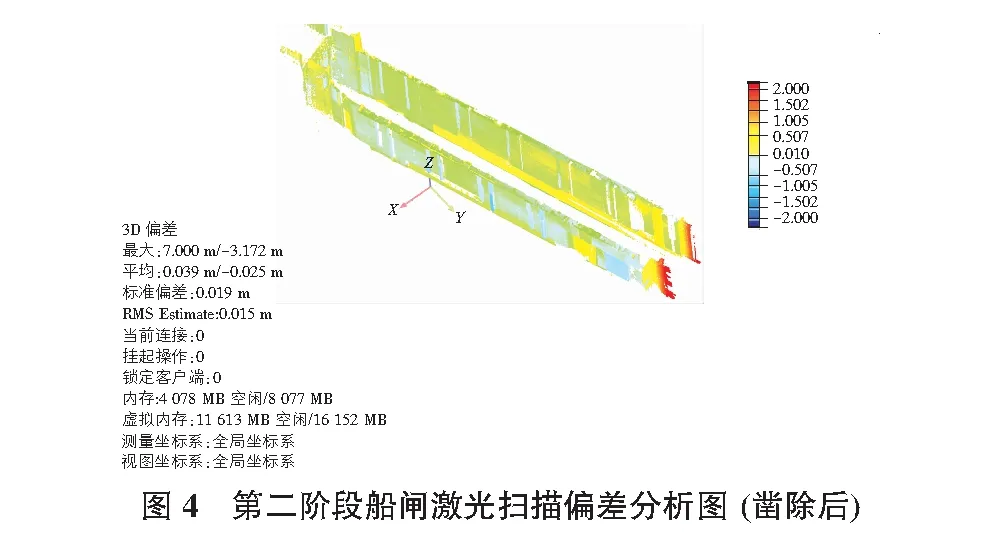
在凿除后的船闸激光扫描图像中,显示船闸的光谱整体大致呈均匀平整分布,表示凿除体积较平均,整体标准偏差约为19 mm,合格率达到92%。而其中空缺及嘈杂部分是施工时的脚手架所在位置,因此在施工完成后需要注意施工现场的清理。
4.4 凿除前点云与凿除后点云对比
如果对整个船闸的凿除偏差结果进行分析,则需要对凿削前后的点云数据进行比较,并由点云原始数据处理软件对三维扫描数据进行处理、拼接、筛选成点云模型后,导入到数据分析软件。在点云偏差对比时,用不同深度的颜色分别对闸门室壁内对应部分的偏差程度进行表示,方便数据偏差表的处理分析,并用Revit模型和CAD图纸对软件分析的数据结果进行二次校核。
4.4.1 左岸闸室内壁偏差图分析数据
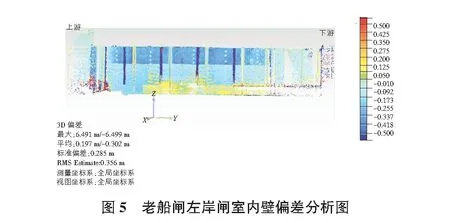
第一阶段与第二阶段两次扫描对比,深色部分表示第二阶段扫描数据比第一阶段数据向左偏移,即向左侧凿除程度。其中上半部分颜色较深,表示凿除较多,下半部颜色较浅,表示凿除较少(见图5)。
原始偏差最大值:6.491 m/-6.499 m;
过滤有效数据,平均偏差:0.197 m/-0.302 m;
平均偏差(即实际凿除):0.285 m;
有效凿除体积:V左=673.313 m3。
4.4.2 右岸闸室内壁偏差图分析数据
第一阶段与第二阶段两次扫描对比,深色部分表示第二阶段扫描数据比第一阶段数据向右偏移,即向右侧凿除程度。其中上半部分颜色较深,表示凿除较多,下半部分颜色较浅,表示凿除较少(见图6)。

原始偏差最大值:4.370 m/-4.462 m;
过滤有效数据,平均偏差:0.545 m/-0.262 m;
平均偏差(即实际凿除):0.546 m;
有效凿除体积:V右=1 289.925 m3;
老船闸室内壁凿除的总体积:V=V左+V右=1 963.238 m3。
5 结语
三维激光扫描技术,可以大大提高工程测量分析效率,并且包含信息丰富,其独特的非接触测量方式,更有利于保护被测物体,与BIM技术的融合应用更是弥补了点云数据处理的单一等难题,提高了数据分析的可能性和准确性。
富春江船闸扩能改造工程的实践表明,三维激光扫描技术与BIM技术的集成应用打破了传统技术壁垒,打通了两种技术的自身限制,能够互相结合各自领域的优势,实现点云数据模型的对比分析,并且时间简短、操作方便快捷,相信两种技术的结合应用可以扩展出更多的数据应用领域。
在本文中通过数据的对比分析,可以准确掌握旧船闸的修复和凿除情况。提高老旧船闸修复的精度和预先判断、选取正确的施工手段,同时可以缩短修复工期,为施工质量和进度情况预警提供依据。但介入时间的选择难度较大,需要施工单位配合清场。建议主要应用在进场前的场地地表测绘,有利于规划施工道路,土石方测算等,也可在竣工部位开展竣工表面测量,以便保留竣工成果。
