位置服务系统在煤矿中的应用
2022-07-14杜志刚
杜志刚
(天地(常州)自动化股份有限公司,江苏 常州 213000)
煤矿井下是一个特殊的作业空间,井下目标对象位置信息对于安全生产作业具有极其重要的作用。人员位置跟踪为考勤管理提供了有效手段,同时可以保障灾时救援行动的迅速有效;机车位置跟踪可以提高运输调度管理水平和生产效率;井下生产设备通过本身与移动目标的位置信息可以保障人机安全作业,设备间相互位置感知是实现协同作业直至实现矿井少人化、无人化智能开采的重要技术基础。由于井下无法接收到GPS 信号,缺乏统一定位服务基础设施支撑,因此,建立井下类似GPS 的位置服务系统势在必行。
1 目前定位系统存在的问题
位置服务系统旨在提供目标对象精准的实时位置信息,是建立在定位基础上的服务,井下定位系统的定位精度、定位速度、实时性直接决定位置服务系统建设的成败。目前国内在用的定位系统主要存在以下几个问题:(1)定位精度不高,定位数据实时性不足;(2)单体式定位系统不满足位置服务系统所要求的开放服务架构;(3)定位系统数据库承载能力不能满足定位数据实时响应要求;(4)位置服务系统要求二维或三维定位才能满足多目标不同场景的应用。
通过研究无线超宽带定位[1-3]、数据优化算法[4]、高精度时钟同步、地磁惯性导航、运动特征约束等关键技术方法,以开放服务体系为基础架构,完成了位置服务系统的开发,为井下运动目标跟踪、人机安全作业、无人驾驶等应用需求提供了高精度实时位置服务。
2 系统组成
位置服务系统主要由位置服务基础设施、数据驱动模块、位置服务管理控制中间件、位置服务接口及数据库组成。其系统架构如图1。
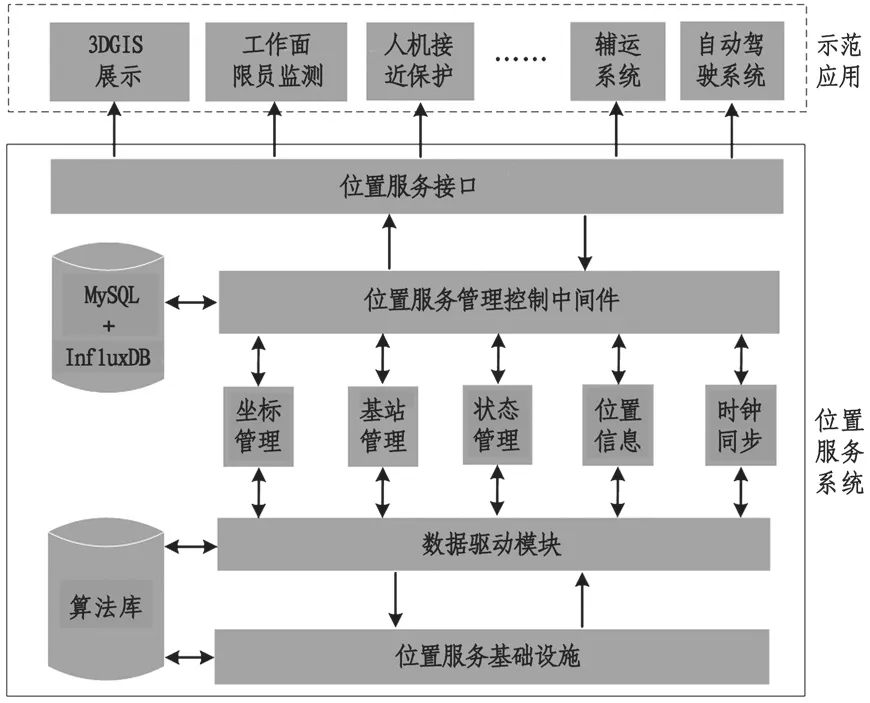
图1 位置服务系统架构
位置服务基础设施主要包括井下传输网络、定位分站和定位标签卡,用来定位和优化目标对象的位置信息;数据驱动模块通过接入矿井有线环网和无线通信网络完成定位数据的交换传输;位置服务管理控制中间件主要完成定位数据的管理、定位设施基础信息维护等,同时负责管理和维护位置服务数据库,数据存储采用MySQL+InfluxDB 的混合存储模式;位置服务接口提供分站位置信息查询、目标对象实时位置信息查询、目标轨迹查询及控制命令接口,同时通过WebAPI 接口为各系统应用提供核心定位数据。
3 示范应用
位置服务示范应用主要包括3DGIS 三维系统展示、工作面限员监测、人机接近保护等,另外系统还为辅助运输管控系统、车辆无人驾驶系统提供移动目标精确位置信息,保证系统的安全运行。系统于2021 年1 月在兖矿集团鲍店矿、陕煤曹家滩矿试运行,经过大量测试优化,系统已稳定运行数月,达到了预期效果。
3.1 3DGIS 三维系统展示
测试现场共安装98 台定位分站及接收器,实现了全部采煤工作面和主要行人大巷信号全覆盖。三维展示软件效果如图2。

图2 三维软件展示
在软件中可查看和管理全矿的井下三维地图,首页可以显示带班领导、区域重点人数、实时报警、井下人员柱状图和人员下井折线图等。在三维GIS图中可以实时展示井下所有人员的位置和走动情况,同步可以展示人员实时位置的列表,可以根据分站和接收器查询人员分布列表;轨迹回放,可以回放人员历史轨迹,根据人员历史轨迹的坐标进行轨迹展示。
3.2 工作面限员监测
为提高煤矿安全保障能力,减少井下作业人数,从源头减少群死群伤事故风险,根据国家相关部门规定,煤矿采掘工作面必须严格控制工作面作业人数。工作面限员控制系统采集通过位置服务系统提供的人员位置信息,实现限员功能。系统主界面如图3。

图3 工作面限员控制系统
在7304 工作面两个顺槽200 m 处各安装了1套工作面限员设备,设备由1 台本安型读卡器(用于接收信号范围内相关人员的定位数据信息)、1台通信信号装置主机(用于超员预报警信息播报)、限员信息显示牌(用于显示工作面实时人员信息)和1 台隔爆兼本安型多路电源组成。通信信号装置主机和显示牌通过RS485 总线与读卡器连接。
限员控制系统具备用户自主设定限员区域的预报警人数、分时限员等功能,并且限员人数并不包含临时性出入的巡检人员。通过位置服务系统提供的人员实时位置信息,系统可判定当前区域的人员详情。当区域人数超过设定人数时,井下信息显示牌显示总人数和人员姓名,同时信号主机播报超员报警,记录详细报警信息。
3.3 人机接近保护
人机接近保护装置主要应用于采煤工作面液压支架、转载机、破碎机等大型移动设备中,设备通过感知自身(安装接收器)与附近人员标识卡的距离信息实现急停或闭锁保障人员安全。
以液压支架人机接近保护为例,支架顶板上安装本安读卡器,工作人员携带标签卡在支架下行走,读卡器与电液控制器相连并上报定位数据,电液控制器根据定位数据进行危险区域判断并进行支架运动控制。其安装如图4。

图4 安装位置示意图
保护装置工作过程中,定位卡动态监测周围接收器,并与距离较近的UWB 接收器进行测距定位。读卡器将测距结果上报给电液控制器,电液控制器根据测距结果判断人员离本架的距离。当人员接近正在移架的液压支架时,液压支架闭锁以保障人员安全。转载机保护装置是在转载机入料口安装UWB 接收器,防止转载机运行过程中人员进入破碎机造成人身伤害。在转载机入料口附近的危险区域内安装几台UWB 接收器,定位周期根据标识卡与接收器的距离动态调整。当标识卡与接收器远离时定位频率自动下降,靠近时定位频率自动提升。人员离入料口的危险距离、预警距离以及标签定位周期与距离的关系等参数都可以灵活配置。
试验表明:保护装置定位精度达0.3 m,标签卡定位周期动态调整范围0.2~0.5 s,定位频次最优达每秒5 次,最差条件下闭锁响应的时间优于0.6 s。
3.4 智能辅助运输
位置服务系统提供的定位数据为智能辅运系统实现车辆实时位置可视化管理、车速控制、车内人员信息查询、车辆超员超速管理提供了数据支撑。
根据现场巷道条件安装了定位接收器实现行车巷信号全覆盖,胶轮车内安装读卡器接收乘车人员标识卡信息,接收器接收到标识卡信息同步传输至位置服务系统主机。其效果如图5。
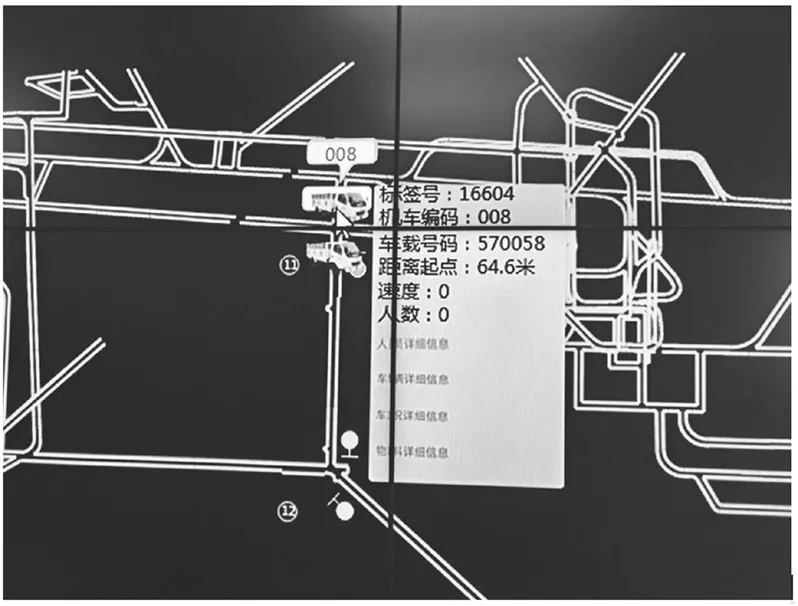
图5 辅运系统效果图
3.5 无人驾驶
无人驾驶是实现智慧矿山建设的一次创新实践,针对井下复杂工矿环境实现井下无轨胶轮车自动驾驶。试验车辆以线控底盘测试车为胶轮车原型,模拟无轨胶轮车线控系统和传感器布局,研制自动驾驶域控制器、车载传感器等一系列装置,选取路线为井下中央变电所到井口,总长度4300 m 左右,包含两个弯道,最大坡度7°,路线中共有21 个读卡器实现信号全覆盖。其布置如图6。

图6 无人驾驶读卡器布置图
实际测试时,安全员坐在主驾驶全程不做任何操作,仅以意外状况下人工介入为目的。首先,运行车辆的实时定位数据可以有效保证车辆会车安全,如在交叉路口,车辆以系统提供的实时位置数据为参考,同时感知其他车辆或装备的相互位置,综合裁决车辆下一步操作,避免车辆碰撞;其次,无人驾驶车辆依赖井下位置服务系统提供定位数据,实现自身精准定位,结合车辆安装的激光雷达、毫米波雷达等主动式定位装置和井下高精地图实现导航和无人驾驶。试验结果显示:测试车辆完成整段路程自动驾驶,实现了车速自动控制、爬坡、避障、绕弯等操作,最终抵达目的地,达到预期效果。
3.6 多系统融合
位置服务系统同时涵盖支持多系统融合,目前已与安全监控、语音广播、无线通讯等系统融合联动。当采掘工作面出现气体超限、人员超限或是其他紧急情况时,系统自动启动联动模式,区域作业人员的标识卡出现蜂鸣警示,警示灯会根据实际情况以不同方式闪烁,并联动相关区域语音广播发出报警。系统还具有双向呼叫功能,作业人员可向地面监控主机发送求救信号。定位标识卡可在2~5 s内正确报警,经过随机多轮多地点测试,联动状态稳定,效果良好,广播和定位标识卡反应及时,满足相关联动要求。
4 结语
位置服务系统涵盖了人员定位系统的核心需求,包括人、车、传感器和各类装备的实时位置监测管理,为矿井抢险救灾提供可靠的位置信息,有效提高救灾效率,降低事故的人员伤亡率。系统为煤矿智慧矿山建设、人机安全协同作业、机器人巡检、无人驾驶等领域提供了重要的数据支撑。