一种车载免置平全站仪概略位姿求解方法
2022-07-12曹娟华朱洪涛吴维军
曹娟华,朱洪涛,吴维军,4,魏 晖,殷 华,朱 敏
(1.南昌大学机电工程学院,南昌 330031; 2.江西制造职业技术学院,南昌 330095;3.江西科技学院汽车工程学院,南昌 330098; 4.江西日月明测控科技股份有限公司,南昌 330029;5.江西农业大学软件学院,南昌 330045)
引言
以全站仪为核心的轨道测量仪基于三维坐标法测量和控制轨道,俗称绝对测量[1],能较好地控制轨道绝对位置、线路线形及长波平顺性[2],但短波测量精度有限且测量效率偏低;以陀螺仪为核心的轨道检查仪基于惯性轨迹法测量和控制轨道,俗称相对测量,无法测量线路坐标,不能较好的控制线路长波平顺性,但中短波测量精度好、测量效率高[3]。将绝对测量和相对测量进行多源信息融合,同时控制轨道绝对位置和长短波平顺性,并兼顾测量效率,是当下轨道测量技术研究和发展的主要方向[4]。安博格的惯导小车和江西日月明的快速绝对测量小车正是同时具备坐标法测量和惯性轨迹法测量的典型产品,是“相对+绝对”复合测量的典型代表,在卫星定位测量还未达到高速铁路毫米级测量精度要求的前提下,是轨道精测的主要手段和方法。
车载全站仪免置平设站是“相对+绝对”复合测量的核心和关键,其设站精度和设站效率是评价“相对+绝对”复合测量的重要指标[5]。根据CPⅢ控制网的精度:平面相邻点相对点位中误差为±1 mm、高程相邻点高差中误差为±0.5 mm[6-7],综合考虑全站仪的测量精度指标(以Leica TS16为例):理想环境下一测回测角精度为1″,测距精度为1 mm+1.5 mm/km[8]。为满足高速铁路线路高平顺性精度和高定位精度对设站的要求,工程上通常需要观测8个CPⅢ控制点,特殊情况下还需要增加观测点数量或采用多测回观测等措施提高设站精度[9]。手动控制全站仪进行8个甚至更多CPⅢ控制点的观测,必然造成设站效率偏低、仪器适用性差等问题的存在。前期以小车当前测量里程和线路设计线形为依据,以线路方位角和坡度角估计小车姿态,进而估计车载免置平全站仪的姿态和位置,从而实现基于1个CPⅢ控制点的自动设站[10],极大地提高了全站仪免置平设站及“相对+绝对”的复合测量模式的测量效率。
随着我国铁路大提速战略的实施,既有线提速成为缓解铁路运输压力最为有效的途径。借鉴高速铁路坐标法控制轨道的成功经验,在既有线提速改造或既有高等级有砟线路的日常养护维修中引入坐标测量和控制,有利于更好地对线路线形和线路中长波进行控制,有利于线路在更长时间或周期中保持稳定[11]。在既有线线路测量引入中“相对+绝对”的复合测量模型,具有现实的意义和需要。然而,由于路基沉降、列车轮轨不均衡作用力影响、养修作业方式与习惯等原因,轨道三维坐标漂移,线路最初带坐标的设计线形早已不复存在,基于线路设计线形的车载免置平全站仪位姿估计方法自然也就无法使用[12]。对不依赖线路线形的车载免置平全站仪概略位姿求解方法进行研究,以少量的观测数据求解其概略位置和姿态,并以此为基础推算出下一个CPⅢ待测点的大概方向,实现程序控制下的自动规划、自动换盘、自动旋转、自动照准及自动测量,即设站自动化,可一定程度地弥补由于多余观测和多测回观测带来的效率上的损失。通过该方法的研究,对完善“相对+绝对”复合测量模式在不同工况下的应用,对提高既有线路养护水平有重要意义。
1 车载免置平全站仪概略位姿求解
1.1 概略位姿模型
如图1所示,铁路工程独立坐标系O-XYZ下8个CPⅢ控制点[13]坐标为(Xi,Yi,Zi),i=1,2,…,8。全站仪处于非水平状态,其位置和姿态参数(XS,YS,ZS,α,β,θ)未知,公式中涉及大量的三角函数,为非线性方程组,至少需要人工观测4个CPⅢ控制点才可计算出全站仪的概略位置和姿态。
在传统测量方法中,置平是全站仪能够得到正确测量结果的前提。然而,通过人工调平无法获得“绝对水平”,仪器总存在倾斜误差,所以全站仪增加了双轴补偿功能,对水平度盘读数和垂直度盘读数进行倾斜补偿改正,以提高测量精度。全站仪位置姿态是指全站仪独立坐标系(坐标原点及坐标轴方向)相对于工程独立坐标系的空间关系,全站仪倾斜姿态角与双轴倾斜角既有区别又有联系。如何利用现有手段和方法对车载免置平全站仪进行约束,挖掘未被使用的测量信息,构建车载免置平全站仪概略位姿求解模型,减少最少人工观测点个数,是提高设站效率的关键。
(1)构建全站仪虚拟水平测量坐标系o-x′y′z′。设站前,通过Leica全站仪接口协议所提供的TMC_SetOrientation(double HzOrientation)子程序重置坐标方位角Hz[14],对全站仪坐标系o-xyz进行约束,使全站仪坐标系x轴和y轴与全站仪双轴(视准轴方向和水平轴方向)方向重合,即:全站仪倾斜姿态角在数值上等于双轴补偿器测量得到的垂直轴倾斜在纵(视准轴方向)、横(水平轴方向)两个方向的倾斜分量。通过TMC_GetAngle (TMC_ANGLE &Angle, TMC_ INCLINE_PRG Mode)子程序对全站仪双轴倾斜角进行测量,得到全站仪倾斜姿态角,即全站仪坐标系x轴与y轴的倾斜角α、β。构建全站仪虚拟水平测量坐标系,即:在当前全站仪坐标系的基础上,保持坐标系原点和坐标系方位角不变,通过坐标系旋转使x轴和y轴位于水平面内。
如图2所示,在三维坐标系统中,求解全站仪位置(XS,YS,ZS)和姿态(α,β,θ)共计6个参数,最少需要4个观测点数据,通过虚平操作,将估计参数和数据进行降维,只需要2个最少观测点,为更早地实现测量自动化奠定基础。
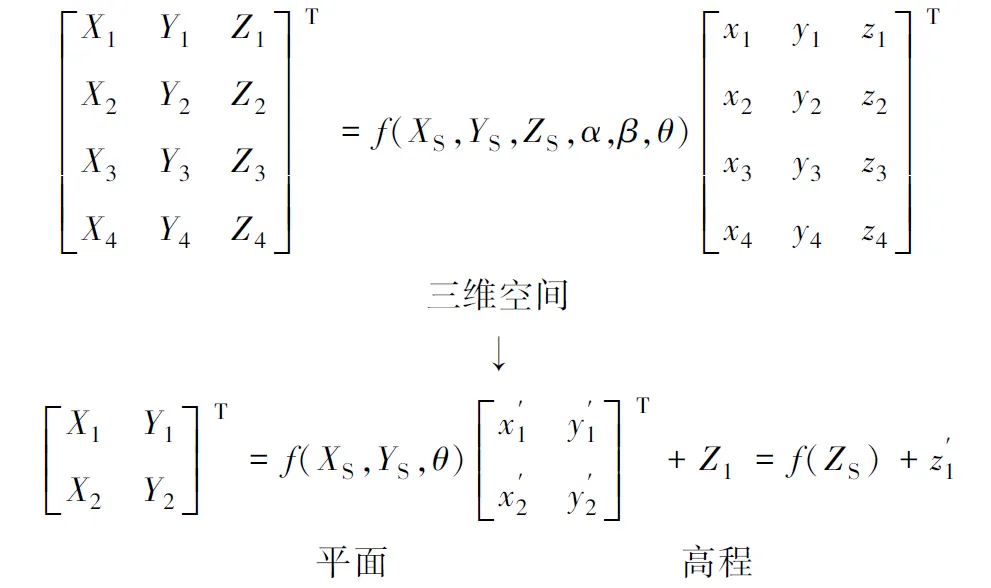
图2 降维原理示意
1.2 概略位姿求解
根据空间坐标变换原理[15],构建全站仪坐标系o-xyz与全站仪虚拟水平测量坐标系o-x′y′z′间的坐标转换函数。将全站仪坐标系o-xyz绕x轴旋转角度α,使y轴位于x′oy′平面内,α角为旋转前y轴与水平面之间的夹角
(1)
将全站仪坐标系o-xyz坐标系绕y轴旋转角度β,使x轴位于x′oy′平面内,此时z轴与z′轴平行,β角为旋转前x轴与水平面之间的夹角[16]



(3)
设全站仪所在位置为P点,在工程独立坐标系下的坐标为(XS,YS,ZS),P点与CPⅢ控制点间的空间几何关系、相关变量如图3所示。
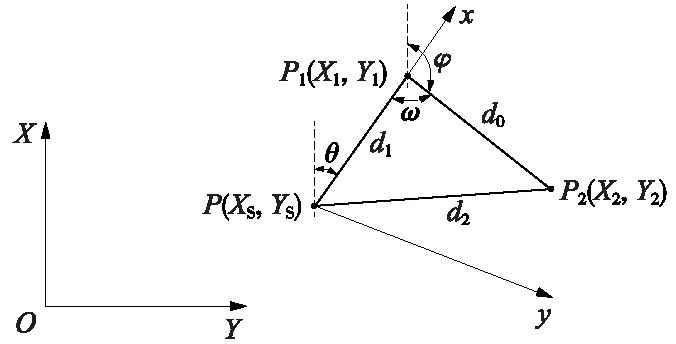
图3 二维平面站点坐标计算示意
φ=arctan(Y2-Y1,X2-X1)
(4)

(5)
基于边P1P的方位角和P1点的坐标,求解全站仪站点坐标

(6)

(7)
同时,全站仪站点高程可通过P1、P2点的高程和测量垂距进行求解,为提高精度,也可采用公式(8)进行加权法计算[17],其中k1,k2为权值,与其测量精度成正比,具体计算可采用P1、P2点测距值的倒数。
(8)

(9)
2 概略位姿精度分析
全站仪能否顺利找到后续待测CPⅢ控制点,以实现设站的自动化,主要取决于站点概略位姿的解算精度能否满足要求,属于精度评定的范畴[18]。对概略位姿精度进行估计,也是本文算法研究的一项重要内容。
设第i个CPⅢ控制点的测量距离为si、水平角为γi,天顶距为φi,则测量坐标(xi,yi,zi)
(10)
(11)

σα和σβ为全站仪双轴倾斜角α和β的测量中误差,对全站仪双轴倾斜角α和β进行重复测量。每次测量前将全站仪旋转到任意角度,通过程序AUT_MakePositioning(0,π/2,0,0,0)将全站仪转到0度方向,即,将全站仪坐标系x轴和y轴旋转到双轴所在的位置,通过TMC_GetAngle(Angle,0)子程序测量α和β,共计10次,倾斜角α和β的测量值如表1所示。
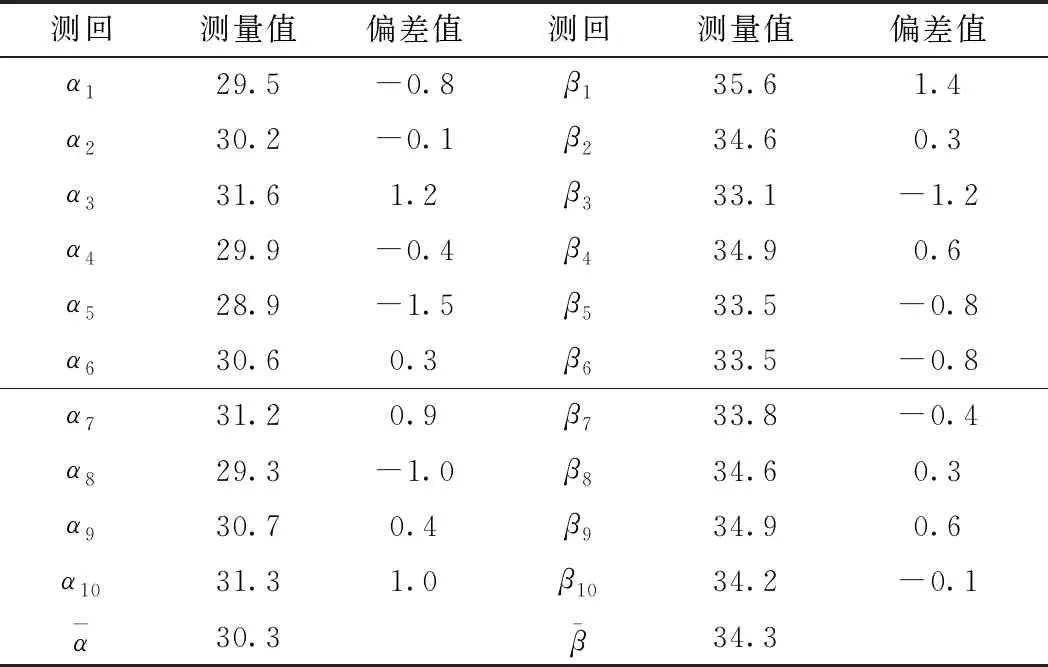
表1 倾斜角α、β测量值 (″)
采用白塞尔公式计算倾斜角α、β的测量中误差σα和σβ
(12)
(13)
(14)
基于全站仪站点概略位姿计算下一个CPⅢ待测点方向,综合考虑站点点位误差、方位角误差及全站仪倾斜角误差,得到关于待测点照准方向角误差的不等式

(15)
式中,ΔP为站点点位误差;Δθ为设站方位角误差。

(16)
根据偶然误差的概率分布规律,取3倍中误差作为待测点方向误差的极限误差U[20],应有
(17)

3 免置平自动设站的实现与试验

(18)
其中
R=


(19)

(20)
3.1 线路试验
仪器:Leica TS16全站仪1台,快速绝对测量小车1套,Leica GPR121棱镜8套。
温度:18~26 ℃; 气压:1 004~1 008 hPa; 湿度:56%~77%;
3.2 试验步骤
(1)快速绝对测量小车在轨道上停稳,进行相关初始化设置(重置全站仪方位角,读取双轴倾斜角)。

(3)计算下一个CPⅢ待测点的相关信息,控制程序自动旋转并照准该CPⅢ待测点,得到该CPⅢ控制点的旋转误差ΔAh和ΔAv。
(4)重复步骤(3),完成自动设站,得到所有CPⅢ测点的旋转误差ΔAh和ΔAv。
(5)推动小车1~2 m并重新打开刹车停稳,选择不同的起始点进行手工照准和测量,重复步骤1~4,完成10次设站并记录所有测点的旋转误差ΔAh和ΔAv。结果数据如表2所示。
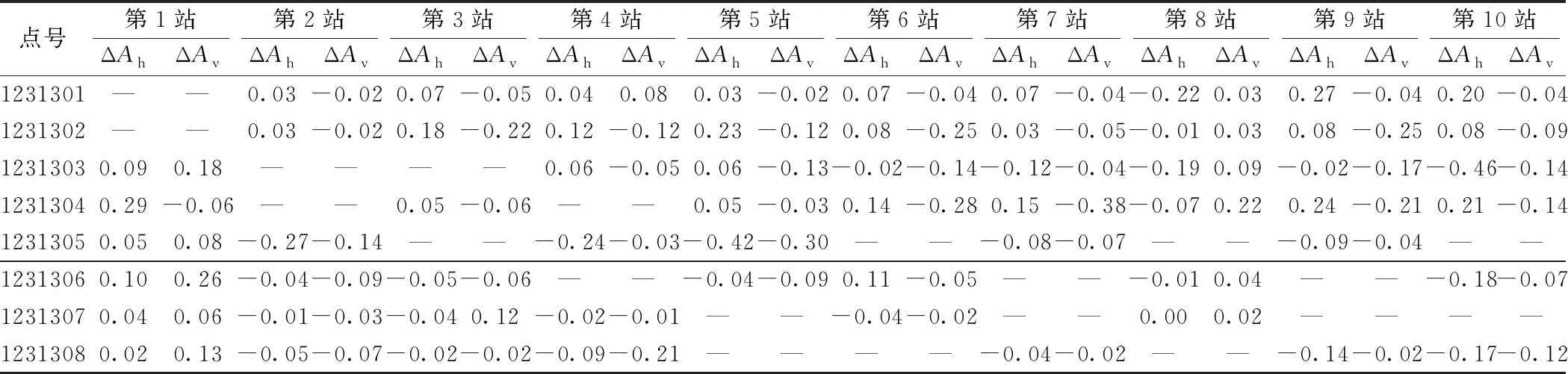
表2 旋转误差ΔAh和ΔAv (°)
首先,从试验过程上看,程序在后续设站中均能准确地找到待测目标,可见站点概略位姿求解方法提高了设站的自动化程度及设站的效率。其次,从各测站的数据上看,旋转误差ΔAh和ΔAv均小于0.5°,可见旋转误差远小于全站仪4°的ATR窗口搜索范围,说明该方法能够获得较高精度的全站仪站点概略位姿。
4 结论
通过虚平降维及空间坐标转换,提出了一种不依赖线路设计线形,基于2个CPⅢ控制点的免置平设站概略位姿求解方法,提高了复合测量模式在不同工况下的适用性,特别是在设计线形已不复存在的既有线养护维修中尤为重要。通过理论精度分析和线路试验得到以下结论。
(1)通过对全站仪双轴倾斜补偿和姿态倾斜角等的分析,使全站仪倾斜姿态角与双轴倾斜角重合并完成测量。基于全站仪虚拟水平测量坐标系,实现概略位姿估计参数和观测数据的降维,进而构建概略位姿求解模型,达到基于2个CPⅢ控制点进行免置平全站仪概略位姿求解的目的。该方法构思精巧,原理清晰。
(3)线路试验表明,全站仪在自动设站过程中能准确地找到待测目标,旋转照准误差ΔAh和ΔAv误差均较小,不超过0.5°。本文所提出的车载免置平全站仪概略位姿求解方法,提高了设站的自动化程度和设站效率,完善了“相对+绝对”的复合测量模式在不同工况下的应用,提高了既有线路运营维护中的线路测量效率。
