海岛礁无控制点低空摄影测量研究与应用
2022-07-12吴星华苏希华
邬 金,王 平,王 久,吴星华,苏希华
(1.交通运输部南海航海保障中心,广州 510235; 2.广州海事测绘中心,广州 510235; 3.地瀛仪器科技(上海)有限公司,上海 201612)
1 研究背景
海岸地形测绘是海事测绘的重要内容,我国有18 000 km长的大陆海岸线和14 000 km长的岛礁海岸线,需定期测绘或修测。如此巨大的工作量,无论采用常规海岸地形测绘技术,还是航空摄影测量技术,都无法实现全覆盖、全要素测绘的要求[1]。
随着计算机技术、数码相机测量技术等的发展,使用无人机进行航空摄影测量的技术已比较成熟,无人机航拍影像具有高清晰、大比例尺、小面积、高现势性的优点,因此采用无人机平台进行海岛礁海岸地形测量将是一个很好的尝试,具有很高的实际应用价值。
南海岛礁远离大陆,分布零散,难以到达,所以无法利用常规测量手段实现基础的测绘工作;且一般的岛礁地物目标单一,难以布设控制点,无法获得航空影像所需的控制点数据。
随着北斗 CORS 系统在全国的建设,采用基于 CORS 基站的 POS 辅助的海岛礁无控制点测量方法,是实现南海岛礁测量的有效途径之一。
目前,海岛区域航空摄影作业的主要方式是常规航空摄影。然而,常规航空摄影作业成本高、周期长,受天气及飞机场地等因素制约,难以满足实时获取目标区域地理信息数据的要求。无人机低空摄影测量技术手段具有结构简单、体积小、重量轻、机动性强、无需专业起降机场、超低空飞行、超高分辨率、天气要求低和实施便捷、成本低等特点,能够获取高清晰、大比例尺、高现势性的影像资料,已经成为获取遥感信息的一种重要手段。将无人机航测技术应用于海岸带及海岛礁的测图生产或海图更新是其在海事测绘领域中应用的拓展[2]。
近年来,随着导航、电子、材料等科技的发展,POS系统取得了突飞猛进的发展,并在大飞机航空遥感领域得到了广泛的应用,取得了很好的效果。在航空摄影测量过程中不仅可以大大减少甚至省去外业地面控制点的布设和测量工作,而且可以简化内业数据处理工作流程,改进数据处理工艺,进而达到提升工作效率、减少生产周期、降低生产成本的目的。近年来,随着一些高性能MEMS POS在无人机激光雷达系统得到广泛应用,此类POS在无人机航测中应用还较为鲜见,有必要开展无人机POS航测系统集成相关技术研究和试验,使小型POS系统在低空遥感领域发挥应有的作用,为我国远海岛礁测绘提供可靠的测绘技术保障。
本文结合海岛礁地形,对基于POS辅助的海岛礁无控制点航测技术进行研究,分析基于POS辅助低空无人机航测系统的技术要求,并对此技术开展了测图试验与精度验证,通过实地试验论证基于 CORS 基站的 POS 数据解算和基于精密单点定位技术(Precise Point Positioning,简称PPP)技术的 POS 数据解算2种方法来实现海岛礁无控制测量作业的技术可行性,并分析两者的精度指标,为今后南海岛礁海岸带地形获取工作提供技术依据。
2 POS辅助航空摄影测量技术
本次试验集成了一款高精度MEMS POS系统用于辅助无人机航空摄影测量,该技术实现无(或少)地面控制点,甚至无需空中三角测量工序,即可直接定向测图,从而大大缩短作业周期、提高生产效率、降低成本。由于该技术因其自身具备的特点和优势,已被广泛应用于各类航空摄影测量成图项目。在实际生产中具体应用此技术时一般采用2种方法,即直接定向法(Direct Georeferencing,简称DG)和集成传感器定向法(Integrated Sensor Orientation,简称ISO)[3]。
POS数据解算主要采用基于CORS基站后处理差分技术和基于精密单点定位(PPP)技术。
对于基于后处理差分技术,当摄区离基准站较近时(推荐<20 km,建议最远不超过70 km),这种方法的定位精度可达到2~5 cm;但当站间距增加至200 km时,定位精度将显著下降。差分GNSS的优点是定位精度高,因此被广泛应用在基于DGNSS技术的POS辅助航空摄影测量中。其不足之处在于作业时至少需要一台接收机置于基站上进行同步连续观测。对于人烟稀少、偏远的荒漠、戈壁区域,建设基站存在很大的困难。如果基站远离摄区,其基站的作用也相对降低[4]。
近些年来,PPP技术逐渐成熟。在该定位模式下,航摄时无需在地面布设基准站,节省大量的人力和物力,并且简化外业航测流程。由此可见,精密单点定位技术将在航空摄影测量工作中发挥重要作用。
早在2011年,Trimble 公司推出了一种新型的实时差分扩展技术(Real-Time eXtended),这种实时定位服务不依赖基准站就能提供厘米级定位精度。相比其他在线提供 PPP服务的系统,Trimble RTX可实现全星座支持,以此提升了载波相位模糊度求解及其收敛能力[5-6]。
3 基于POS辅助低空无人机航测系统的技术要求
根据目前国内无人机调研来看,对于海岛礁地形条件,固定翼不太适合。对于岛上或陆地起飞情况,推荐采用油电混合动力方式垂直起降固定翼无人机。对于小面积岛礁,则建议采用电动多旋翼无人机。
垂直起降固定翼无人机结合了固定翼无人机和多旋翼无人机的优点,即借用了多旋翼无人机能够不依赖起降场地,可在多种环境中起降的优点,又吸纳了固定翼无人机的长航时、大载荷和较高巡航高度的优势。因此,垂直起降固定翼无人机可以发挥极大的外场作业效率。对于远离陆地、陆地面积小的南海岛礁来说,采用垂直起降固定翼无人机十分必要。
对于船载起飞情况,为安全起见,推荐采用纯电动垂直起降固定翼无人机或多旋翼电动无人机[7]。
机载GNSS接收机应采用动态多星多频测量型GNSS接收机,搭载MEMS POS系统,其姿态精度:侧滚角和俯仰角不应>0.03°,航偏角不应>0.08°。同时应搭载高清数码相机,像素应在2 000万以上[8]。
目前无人机航拍搭载高清相机能够获取0.05~0.2 m分辨率的航空影像,甚至更高,可以满足1∶500~1∶5 000比例尺地形图测绘要求。成果形式、质量、格式等应符合地形图规范要求,以便与海图编绘系统兼容[1,9]。
4 海岛礁航测试验
4.1 试验地点概况
本次试验航摄区域选在舢板洲上,位于广州市南沙东南 113°34′20″E—113°37′20″E,22°42′00″N—22°45′00″N范围内,面积约0.2 km2,岸线长0.45 km。岛上有灯塔、钟楼、码头、国旗等,具有海岛礁代表性地形特点。
4.2 航线设计
测区飞行设计高度约为200 m,根据测区内最高点和最低点高程,实际获取影像的地面采样间隔(GSD)优于2.5 cm,符合设计需求。
利用mdCockpit地面站软件进行航线设计和自动生成航线。其中航高200 m,航飞2架次。地面采样为3 cm GSD,航向重叠度80%,旁向重叠度60%,地面安全高度20 m。由于测区面积小,海水面积大,采用大旁向重叠才能取得足够影像用于空三加密计算。
4.3 POS辅助的无人机航测系统
本次试验采用microdrones md4-1000电动四旋翼无人机平台,集成APX-15 POS定姿定位系统与索尼黑卡Rx1R2高分辨率数码相机集成的 POS相机进行无人机航测试验。其中 POS定姿定位系统指标见表1。
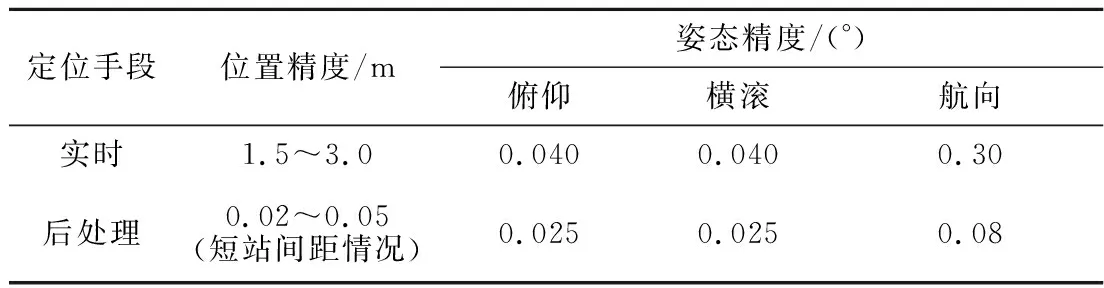
表1 APX-15 POS定姿定位系统指标Table 1 Speification of APX-15 POS system
5 POS数据处理
本项目采用Applanix的POSPac UAV软件对机载POS数据进行处理。POS数据主要由IMU(APX-15L)和GNSS以及卫星星历数据组成,其中POS后处理数据频率为200 Hz。
5.1 基于CORS站后差分技术的POS数据解算
利用POSPac UAV软件对测区内架设的基站GNSS数据,采用后处理差分POS紧耦合算法分别进行正向和逆向双向解算,并对其结果进行联合估算得到最优轨迹。
为便于精度评估,对该数据采用地面基站数据进行后处理差分,定位精度为:平面中误差2 cm,最大2.8 cm;高程中误差3.5 cm,最大4.6 cm。
5.2 基于PP-RTX 技术的POS数据解算
由于传统的PPP算法需等待大约两周才能获取到精密星历和钟差文件,且精度相对较低。所以本次试验决定采用PP-RTX技术,利用POSPac UAV软件进行POS数据处理。
“虽然马上就要离开工作生活了三年的这片热土,离开朝夕相处的学生、同事和朋友们了,但我的生命中已有了与二二二团不可分割的联系,今后无论身在何处,我将永远翘望、牵挂这里的一切。”援疆教师王文娟依依难舍之情溢于言表。□
同时对该数据采用PP-RTX算法进行定位的误差分析。分析结果表明平面中误差为2 cm,最大为3.9 cm;高程中误差为3.8 cm,最大为6.1 cm。
5.3 试验成果
本次试验分别利用Pix4D和Inpho软件,采用ISO无控制点和引入单个控制点2种情况分别进行空三处理。
本次试验共布设13个检查点,基于ISO进行POS辅助航测技术精度验证,均匀分布在精度验证区周围。
按规范限差要求,1∶1 000成图比例尺检查点平面中限差≤±0.5 m,高程限差≥±0.28 m。检查点实测成果均满足这一精度指标,说明本文POS辅助航空摄影方案符合要求。
5.3.1 无控制点ISO精度对比
表2给出利用测区内基站进行后处理差分与利用PP-RTX技术进行POS数据处理,在无控制点情况下进行ISO空三解算,从DOM成果中分别提取与检查点对应的点,进行精度对比。

表2 无控POS辅助航空摄影ISO精度对比Table 2 Comparison of ISO precision of POS-aided photogrammetry without GCP
在无控制点情况下,对于POS辅助空三上述2种解算方案,后处理差分处理方案的精度要优于PP-RTX方案。按相关规范检查点精度要求,后处理差分和PP-RTX方案均可满足1∶2 000测图要求。
5.3.2 引入1个控制点ISO精度对比
表3给出了利用测区内基站进行后处理差分与利用PP-RTX技术进行POS数据处理,在引入1个控制点情况下进行ISO空三解算,从DOM成果中分别提取与检查点对应的点进行精度对比。

表3 POS辅助空三(ISO,1个控制点)测量精度对比Table 3 Comparison of survey accuracy of POS-aided aerotriangulation (ISO, 1 control point)
在引入1个控制点情况下,上述2种解算方案精度明显提高。其中PP-RTX方案在条件理想情况下可满足1∶500测图要求。
5.3.3 海岛测量成果
本次试验限于条件,航飞时间基本在试验地点高潮位期间,采用200 m航高2个架次,400 m一个架次,共飞行3个架次,获取268张影像。
本文采用上述基于ISO PPP无控制点方案,生成一系列测区成果图,见图1[10]。
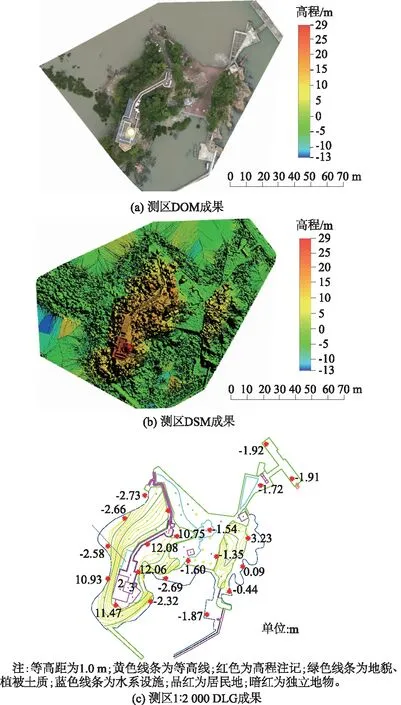
图1 测区成果[10]Fig.1 Results of test area[10]
本次试验区域岛礁面积太小,航测时拍摄的影像大多落在海面上,影像间连接性太差,需要一些人工干预处理来生成DOM。建议进一步开展对于海岛周边水域空三加密(这些像片无法用于正确匹配连接点)对精度影响问题、剔除海面配准错误的连接点等方面进行研究[11]。
6 结论与建议
6.1 结 论
对于特殊困难地形条件(如海岛礁、带状), 基于POS辅助航测应用,可利用高精度POS数据约束空三解算,大大减少连接点数量,减少航带数量,旁向重叠率可低于40%,大大提高作业效率。
本文通过基于POS辅助的海岛礁无控制点无人机航空摄影测量技术研究与试验结果,可得出如下结论:
(1)基于PPP的定位技术与后处理差分精度的POS解算精度相当。这表明对于布测地面基站困难的海岛礁测量项目,在无法设置地面GNSS基站的情况下,可采用PPP技术,通过POS辅助空三,可省掉地面基站的布设、观测和计算工作。能够满足1∶2 000海岛测量规范要求。
(2)当CORS网中GNSS基站距离摄区在70 km范围内,建议采用基于后处理差分技术的POS辅助航测ISO解算方法,定位精度高。
(3)基于MEMS POS辅助无人机航空摄影测量技术具有性价比高、机动性好、作业效率高、成本低等优势。
6.2 建 议
对于船载无人机起降作业方式,建议采用船上具有飞行甲板的船只,确保无人机起降安全。
建议海岛礁岸线地形测量采用基于POS系统的免像控点无人机航空摄影测量技术和ISO方案,按1∶2 000海岛测量规范要求进行施测。
本次试验采用的POS航向精度为0.08°,采用DG直接定向法航测难以满足1∶2 000 海岛测图精度要求,建议进一步开展在较低航高下(如<100 m)的相关精度验证。
