Keystone变换实现方法研究
2022-07-07张翔宇王国宏
张 亮,张翔宇,王国宏
(1.海军航空大学信息融合研究所,山东烟台 264001;2.中国人民解放军94326部队,山东济南 250000;3.海军航空大学航空电子与指挥系,山东青岛 266041;4.中北大学信息与通信工程学院,山西太原 030023)
1 引言
现代雷达多使用大时宽带宽积信号,以同时获得高距离分辨率和远作用距离,带宽的增大意味着采样频率的提升,提升采样频率利于改善信噪比(Signal to Noise Ratio,SNR),但也给雷达信号处理带来目标距离走动校正难题[1~4],特别是目标处于高速机动或雷达工作于长时间积累模式时.雷达相参积累中,通常利用Keystone 变换[5](Keystone Transform,KT)消除目标距离走动.KT 核心思想是构造虚拟慢时间,去除快时间频率与慢时间耦合关系,当目标存在速度模糊时,还需估计模糊数进行相位补偿,上述过程针对目标仅存在径向速度的情况,当目标存在加速度、加加速度等高阶项时,涉及高阶KT[6,7],核心思想相同.围绕KT 去耦合问题,文献[8]最早提出利用辛格插值实现,但该方法计算复杂度较高.文献[9]提出基于时间尺度(Time-Scaling,TS)的KT 去耦合方法,文中称其为scaling 原理,该方法数值计算中为实现1个快时间频率单元回波去耦合,需要进行2 次chirp 乘积、2 次chirp 卷积,计算量同样较大.针对该问题,文献[10]联合Chirp-Z 变换(Chirp-Z Transform,CZT)和快速傅里叶逆变换(Inverse Fast Fourier Transform,IFFT),提出“CZT+IFFT”去耦合方法,该方法为实现1个快时间频率单元回波去耦合,仅需要2次chirp乘积、1次chirp卷积和1次IFFT,由于1 次chirp 卷积需要进行2 次快速傅里叶变换(Fast Fourier Transform,FFT)和1 次IFFT,因此计算量低于文献[9]方法,但文中仅给出了方法步骤,未提供充足的理论解释和应用条件分析.除上述方法外,还有基于离散傅里叶变换(Discrete Fourier Transform,DFT)和IFFT 的“DFT+IFFT”方法,文献[11]从工程实现的角度论证得出“DFT+IFFT”方法与文献[10]方法实现过程相同.傅里叶变换作为一种经典的积分变换,以其为纽带揭露了自然界除时间外的另一个基本物理量,频率.科恩认为“尺度是一种像频率一样的物理属性”,而链接时间与尺度的纽带为梅林变换(Mellin Transform,MT)的特例尺度变换[12](Scale Transform,ST).ST 具备尺度不变性,该特点可用于计算回波快时间频率单元信号尺度版本,实现KT去耦合.
针对上述问题,本文运用时间尺度和尺度估计(Scale-Estimation,SE)两个基本概念,提出3种KT 实现方法,其中,第1 种方法是对现有“CZT+IFFT”方法的修正,另外2 种方法均利用梅林变换实现,区别在于不同的实现思路.
2 Keystone变换
2.1 基本原理
设窄带雷达载频为f0,发射线性调频(Linear Frequency Modulation,LFM)脉冲信号,脉宽Tp、带宽B、调频斜率为ρ=B/Tp,雷达探测范围内1 个点目标向站飞行,初始距离R0、径向速度vt.设目标反射系数为1,雷达接收射频目标回波为:

式中:t为快时间,tm=mTr为慢时间,rect[·]为矩形窗函数,m=0,1,2…M-1,M为相参积累个数,Tr为脉冲重复周期,τm=2R(tm)/c为回波时延,R(tm)=R0-vttm为目标与雷达径向距离函数,c为光速.回波下变频得到:

沿快时间进行脉冲压缩,得到:

式中:sinc[·]为未归一化的辛格函数.当τm大于雷达1个距离单元对应时延,目标将出现距离走动.为校正距离走动,对脉压后回波沿快时间做傅里叶变换,得到:

式中:f为快时间频率,与慢时间耦合.构造虚拟慢时间[8~10],即tom=,带入式(4):

沿快时间频率做逆傅里叶变换,得到:

对比式(3)可知,目标距离走动被校正,沿tom做FFT可实现相参积累,上述过程适用目标径向速度不模糊情况,当目标存在速度模糊时,还需对式(4)补偿模糊数,再构造虚拟慢时间去耦合.
2.2 典型实现方法
现有KT 实现方法中,“CZT+IFFT”方法计算量最低.该方法最早由文献[10]提出,文中给出了操作步骤,但未提供充足的理论解释.设离散序列x(n)长度为N,n=0,1,2,…,N-1,其CZT为:

式中:k=0,1,2,…,K-1,K为Z 平面频谱采样点数,A为起始抽样点,W为一个与伸展率和抽样点角度差有关的复标量.“CZT+IFFT”方法要求K=N、A=1、W=exp(-i2πγ/N),γ为CZT比例系数,式(7)可简化为:

“CZT+IFFT”方法中的IFFT为IDFT快速算法,计算式(8)的IDFT,得到:
得到:


式(12)即为“CZT+IFFT”方法基本原理.该方法在数值计算中并不完美,因为CZT 是一种特殊的Z 变换,式(8)可理解为计算x(n)在单位圆上的N点频谱采样值,间隔为2πγ/N.当γ<1 时,采样区间位于单位圆内,如果式(12)中的频点(2vt/λ)·(f+f0)/f0位于采样区间外,计算CZT会导致频点丢失,后续的IFFT自然也没有意义;当γ>1 时,采样区间超出单位圆,出现了频率混叠.为避免频率混叠应调整Z平面采样点数,取:

式中:fix[·]表示向零取整,然后在X(k)后补零,补零长度为N-K,再计算IFFT,本文将其命名为修正的“CZT+IFFT”方法.需要注意的是,该方法同样无法解决可能的频点丢失问题,由于减少了Z 平面采样点数(γ>1),受噪声影响会相应增大.另外,至于何种情况下会发生频点丢失问题,具体与目标不模糊多普勒频率和(f+f0)/f0数值有关.由于目标不模糊多普勒频率通常是未知的,因此(f+f0)/f0数值越小,CZT 采样区间也越小,发生频点丢失的概率也越大.
3 Keystone变换实现思路
时间尺度(TS)与尺度估计(SE)是关于尺度的2 个基本概念,文献[9]最早将TS引入KT(文中称其为scaling原理),本节进一步引入SE,给出2种KT实现思路.
3.1 时间尺度与尺度估计
所谓TS[12],即连续信号x(t)到y(t)的映射过程,可表示为:

式中:TSα[·]为TS表示符号,α∈R+为尺度因子自变量,是为保持TS前后信号能量相同,即:

式(14)可理解为利用TS 操作,对原始信号进行拉伸或者压缩,以获得原始信号尺度版本,具体拉伸或者压缩程度由尺度因子决定.很明显,当0 <α<1 时,TS后的信号时域扩张,当α>1 时时域收缩.设连续信号z(t)=TSα1[x(t)],α1为尺度因子确定值.所谓SE,即z(t)、x(t)已知时对α1的估计,可表示为:


式中:◇为尺度互相关符号,*为共轭转置符号.与时域互相关、频域互相关不同,Φzx(α)自变量为尺度因子,最大值对应的尺度因子即为尺度因子估计.从两个特例分析TS 对信号影响,设x1(t)为单频信号、x2(t)为线性调频信号,复数形式为:
式中:η为x1(t)频率,μ为x2(t)调频斜率,T为时宽.易知:

式中:y1(t)、y2(t)分别为x1(t)、x2(t)时间尺度后的信号.对连续信号做时间尺度,会改变信号幅度、时宽、频率(单频信号)和带宽(LFM 信号).对于幅度的变化,离散化处理中如果要求TS 前后幅度相同,需对TS 后信号进行幅度调整;对于时宽的变化,如果要求采样点数相同,需对TS 后信号补零(α>1)或截取(α<1);对于频率和带宽的增大(α>1),为满足采样定理,应提高采样频率避免混叠.为直观显示,图1以时宽为1s的余弦信号为例,给出了尺度因子为0.5、2时的时间尺度和尺度估计示意图.
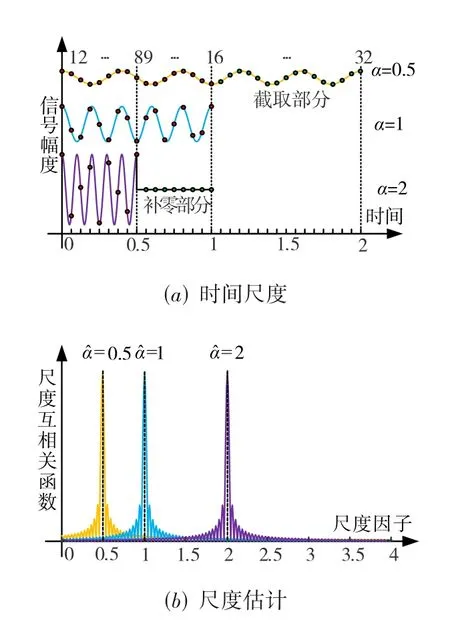
图1 时间尺度与尺度估计示意图
3.2 两种实现思路
取式(4)和式(5)慢时间部分,得到去耦前后回波慢时间信号分别为:

设x(f,tm)、y1(tm) 为连续信号,易知y1(tm) 为x(f,tm)的时间尺度,尺度因子为f0/(f+f0),然后再调整幅度,具体可表示为:

当目标速度不模糊时,利用式(24)去耦合是合理的.当目标存在速度模糊时,将式(22)表示为:

式中:fd为目标不模糊多普勒频率,F为模糊数.去耦后的慢时间信号为:

为实现KT 去耦合,对x(f,tm)进行模糊数补偿(Fuzzy-number Compensation,FC),得到:

再进行时间尺度、调整幅度,具体可表示为:

式(28)即为KT 的第1 种实现思路,将其命名为“FCTS”,该思路最早由文献[9]提出,文中的TS 环节利用两个级联的chirp 滤波器实现.当目标存在速度模糊时,“FCTS”思路面临模糊数搜索问题,传统方法是设定搜索区间,根据目标最大峰值确定模糊数,搜索区间的扩大会导致运算量成倍增加,针对该问题,文献[14]在文献[10]基础上,通过调整CZT 起始抽样点,降低了搜索运算量.在此产生1 个疑问,是否存在无需模糊数补偿的KT实现思路,重写式(25):

进一步表示为:

4 Keystone变换的梅林域实现方法
为得到高效的KT,需要解决TS、SE 快速实现问题.实际上,TS 实现方法有很多种,文献[8~10]中的辛格插值、级联chirp 滤波等方法均可纳入TS 实现方法范畴,不同于上述方法,本文利用梅林变换解决TS 和SE快速实现问题.
4.1 梅林与尺度变换
梅林变换(MT)是一种积分变换,其出现时间较傅里叶变换要晚的多,近年来随着MT 理论的深入研究,已应用于目标识别[15]、尺度不变系统设计[16]等领域,广义MT表示式为:

式中:M{·}为MT 表示符号,F(s)为信号f(t)的MT,自变量s=β-iζ为复数.当β=0.5时,MT 即为科恩提出的尺度变换[12].ST表示式为:

式中:S{·}为ST 表示符号,Df(ζ)为信号f(t)的ST,ζ为尺度,对应傅里叶变换中的频率.令t=eu,带入式(35),得到:

Df(ζ)为的傅里叶变换,可利用FFT 实现[17],即快速尺度变换(Fast Scale Transform,FST).逆尺度变换(Inverse Scale Transform,IST):

IST 可利用IFFT 快速实现,即快速逆尺度变换(Inverse Fast Scale Transform,IFST).FST 数值计算中要求对连续信号f(t)进行指数采样,对于现实的等间隔离散数据需要插值重采样,根据指数采样理论[18],重采样信号长度应不小于NlnN,N为原始信号等间隔采样点数,结合FFT 操作可知FST 计算复杂度为O[(NlnN) log2(NlnN)],总共需要的复乘次数为NlnN+0.5(NlnN) log2(NlnN),IFST 计算过程与FST相反,先计算IFFT 再进行对数采样,计算量与FST相同.
4.2 TS与SE快速实现
设信号z(t)=TSα1[x(t)],为解决TS 快速实现问题,引用ST尺度不变性,即:

式中:Dx(ζ)、Dz(ζ)分别为x(t)、z(t)的ST,两者包络相同、相位不同.计算式(39)的IST,容易得到:

利用上式可得x(t)在某一尺度因子下的TS 后信号.SE同样利用ST快速实现[13]:

尺度互相关函数实现形式与脉冲压缩(时域互相关)快速实现相似,区别在于脉冲压缩是利用FFT、IFFT在频域实现,而尺度互相关函数是利用FST、IFST 在尺度域实现.需要注意的是,式(37)S-1{·}内的自变量为时间t,式(41)中为尺度因子α,两者物理意义不同.式(40)可知,利用ST 实现TS 需要进行1 次FST、1 次复数点乘和1 次IFST,总共需要进行的复乘次数为3NlnN+(NlnN) log2(NlnN),式(41)可知,计算尺度互相关函数需要进行2 次FST、1 次复数点乘和1 次IFST,总共需要复乘次数为4NlnN+1.5(NlnN) log2(NlnN),计算复杂度相同.
4.3 计算复杂度分析
为方便描述,采取“KT-实现思路-使用工具”方式,将现有3 种实现方法和所提3 种方法,依次命名为KTFCTS-SINC[8]、KT-FCTS-Chirp[9]、KT-FCTS-CZT[10]、KTFCTS-MCZT、KT-FCTS-MT 和KT-SETS-MT.设目标模糊数为F,回波信号经下变频、脉冲压缩、快时间FFT 得到M×P的二维矩阵,M为相参积累个数,P为快时间频率点数,偶数,利用上述方法对P个快时间频率单元回波进行去耦合处理,分析算法计算复杂度.
首先,分析现有3 种方法计算复杂度.KT-FCTSSINC 方法,为实现1 个快时间频率单元回波去耦合需要进行M2次复乘,结合模糊数补偿环节可知,该方法总共需要FP(M+M2)次复乘运算,计算复杂度为O[FPM2];KT-FCTS-Chirp 方法,为实现1 个快时间频率单元回波去耦合需要进行2 次chirp 乘积、2 次chirp卷积,需要的复乘次数为FP(5M+3Mlog2M),计算复杂度为O[FPMlog2M];KT-FCTS-CZT 方法,为实现1个快时间频率单元回波去耦合,需要2 次chirp 乘积、1次 chirp 卷积和 1 次 IFFT,计算复杂度为O[FPMlog2M],总共需要的复乘次数为FP(4M+2Mlog2M).
其次,分析所提KT-FCTS-MCZT 方法计算复杂度.该方法在计算1 个快时间频率单元回波CZT 时,区分CZT 比例系数γ≤1、γ>1两种情况,当γ≤1时,需要进行4M+2Mlog2M次复乘运算,当γ>1 时,需要进行M+3K+1.5Klog2K+0.5Mlog2M次复乘运算,K=fix(M/γ)为CZT采样点数,因此该方法总共需要的复乘次数为:

式中:Ki=fix(M/γi)为第i个快时间频率单元回波CZT采样点数,γi>1 为对应的CZT 比例系数.上式可知,KT-FCTS-MCZT方法计算复杂度与KT-FCTS-CZT相同,但需要的复乘次数更少.
然后,分析所提KT-FCTS-MT 方法计算复杂度.该方法为实现1 个快时间频率单元回波去耦合需要进行1 次FST、1 次复数点乘和1 次IFST,复乘次数为(MlnM) log2(MlnM)+3MlnM,结合模糊数补偿环节可知,该方法总共需要的复乘次数为FP(M+3MlnM+(MlnM) log2(MlnM)),计算复杂度为O[FP(MlnM) log2(MlnM)].
最后,分析所提KT-SETS-MT 方法计算复杂度.该方法为实现1个快时间频率单元回波去耦合,需要进行3 次FST、2 次复数点乘和2 次IFST,复乘次数为7MlnM+2.5(MlnM) log2(MlnM),由于无需模糊数补偿,该方法总共需要的复乘次数为
(P-1)(7MlnM+2.5(MlnM) log2(MlnM)),计算复杂度为O[P(MlnM) log2(MlnM)].设F=1,对比可知KT-FCTS-Chirp、KT-FCTS-CZT、KT-FCTS-MCZT方法计算复杂度最低,均为O[PMlog2M],KT-FCTSMT、KT-SETS-MT 方法计算复杂度最高,均为O[P(MlnM) log2(MlnM)],KT-FCTS-MCZT 方法所需要的复乘次数最少,KT-SETS-MT 方法所需要的复乘次数最多.
5 仿真与结果分析
5.1 参数设置
设窄带雷达载频1 GHz,重频10 kHz,相参积累个数为128,发射LFM脉冲信号,脉宽10 μs,带宽20 MHz,采样频率40 MHz;雷达探测范围内1 个高速点目标向站飞行,初始距离8 km,径向速度80 km/s.
5.2 仿真试验1
对所提KT-FCTS-MCZT、KT-FCTS-MT 方法可行性进行验证.脉冲压缩后回波一维距离像如图2 所示,目标存在明显的距离走动.根据式(27)对回波进行真实模糊数补偿,然后沿回波快时间频率做IFFT,结果如图3 所示,目标距离走动得到很大程度改善,但慢时间上仍未完全对齐.

图2 脉冲压缩后回波
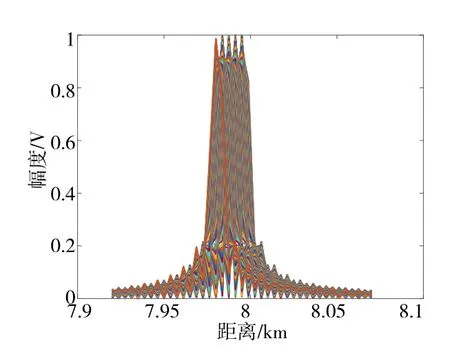
图3 模糊数补偿后回波
对图3 回波沿快时间频率做FFT,再利用所提KTFCTS-MCZT和KT-FCTS-MT方法校正目标距离走动,结果分别如图4、图5所示,目标在慢时间上完全对齐.
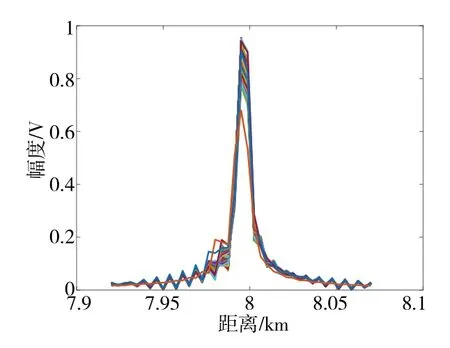
图4 距离走动校正结果(KT-FCTS-MCZT)
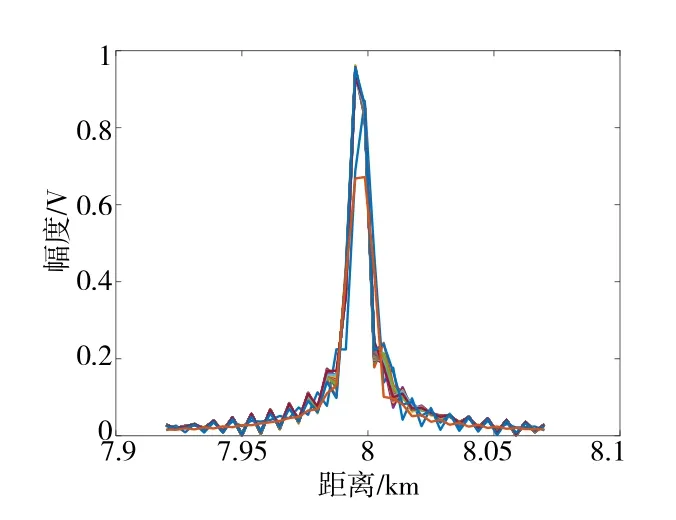
图5 距离走动校正结果(KT-FCTS-MT)
5.3 仿真试验2
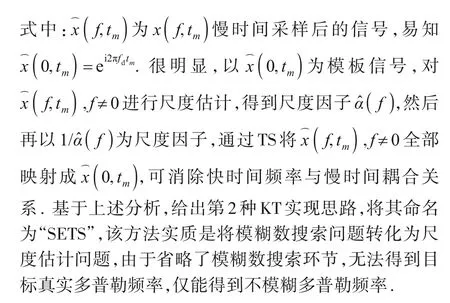
本节对所提KT-SETS-MT 方法可行性进行验证.首先,沿快时间对脉压后回波快时间做FFT,结果如图6 所示,然后以快时间频率为0 MHz 的慢时间信号为匹配信号,对非零频慢时间信号进行尺度估计,结果如图7所示,图中每1列对应1个尺度互相关函数.
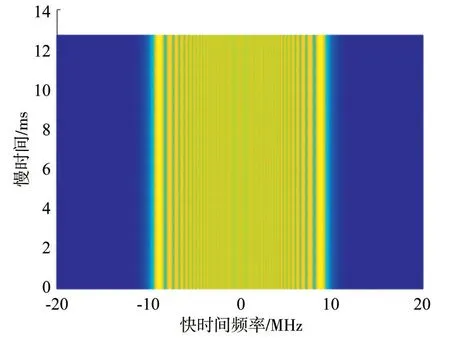
图6 回波快时间FFT
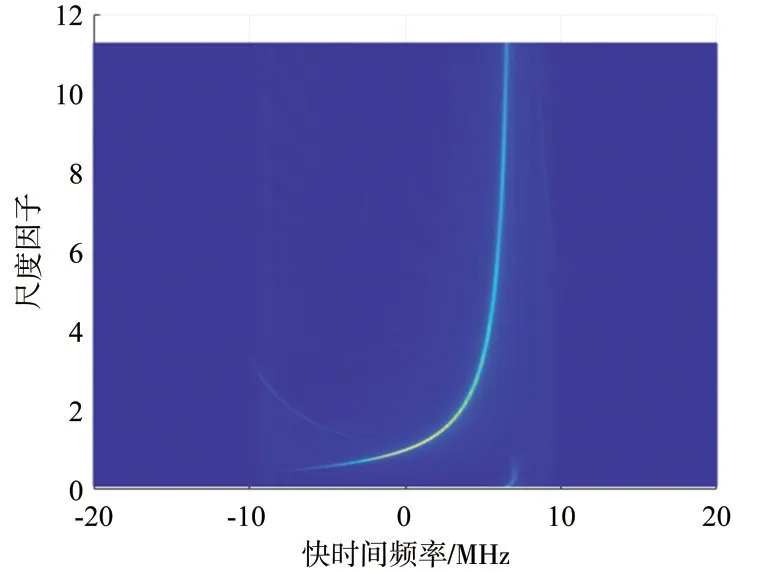
图7 回波慢时间尺度估计
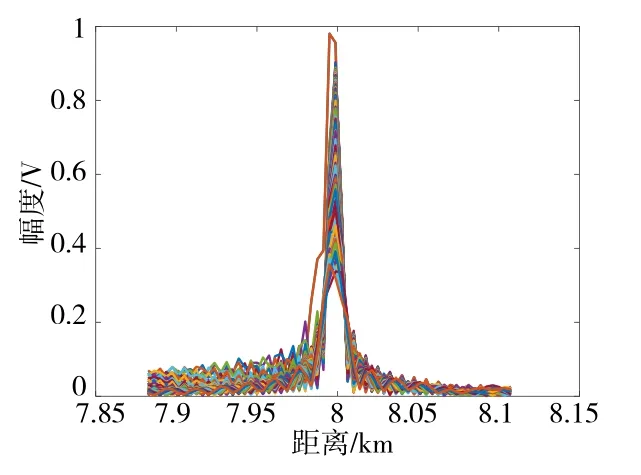
图8 距离走动校正结果(KT-SETS-MT)
5.4 抗噪效能分析
本节对比现有3 种KT 实现方法,对所提3 种方法抗噪效能进行验证.雷达积累脉冲数分别取128、160个,其他参数同5.1 节,信噪比(Signal to Noise Ratio,SNR)取值-20~5 dB,间隔2 dB,运行蒙特卡洛仿真500次,不同脉冲数下的目标检测概率(Target Detected Ratio,TDR)整体效果如图9(a)所示,将SNR 取值范围调整为-20~-15 dB,间隔0.5 dB,局部效果如图9(b)所示.
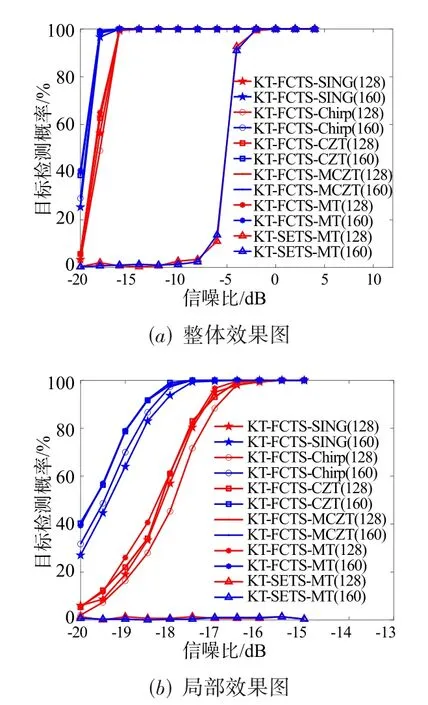
图9 不同脉冲数下的目标检测率曲线
同理设目标径向速度分别为50 km/s、80 km/s,其他参数同5.1 节,不同径向速度下TDR 曲线如图10 所示.进一步设雷达载频分别为0.5 GHz、1 GHz,不同载频下TDR 曲线如图11 所示.由2.2 节可知,KT-FCTSCZT 和KT-FCTS-MCZT 特定参数下存在频点丢失问题,本节使用参数能够确保模糊数补偿后的目标多普勒频率始终位于CZT采样区间内,不会出现频点丢失.

图10 不同径向速度下的目标检测率曲线

图11 不同雷达载频下的目标检测率曲线
综合图9(a)、10(a)、11(a)可以看出,前5 种KT实现方法抗噪性能相差不大,当SNR 大于-16 dB 时,不同参数下的TDR 均接近100%,而KT-SETS-MT 方法TDR 接近100%的临界SNR 为-2 dB,说明该方法不适用于低SNR 条件,分析原因是因为该方法需要对非零频慢时间信号进行尺度估计,然后再进行TS,由于缺乏峰值对比环节,算法受噪声影响更大.综合图9(b)、10(b)、11(b)可以看出,前5 种KT 实现方法抗噪性能基本相当,但也存在微小差距,总体上看,KT-FCTS-MT方法抗噪性能最优,KT-FCTS-CZT 与KT-FCTS-MCZT抗噪性能次之且基本相同,KT-FCTS-SINC 方法抗噪性能最差.同时可以看出,算法均受载频影响较大,载频越大目标检测效能越好,反之越差,分析原因是因为载频越大,KT 尺度因子越接近于1,即使不执行TS 操作,模糊数补偿后的目标回波慢时间仍能部分对齐,反之载频越小KT 尺度因子动态范围越大,模糊数补偿后的目标回波慢时间对齐数量也越少,目标距离走动校正效果受TS 执行精度影响也越大.
6 结论
围绕Keystone 变换快速实现问题,提出修正的“CZT+IFFT”方法,文中将其命名为KT-FCTS-MCZT.同时,利用梅林变换尺度不变和尺度估计特性,进一步提出2 种梅林域的Keystone 变换实现方法,依次命名为KT-FCTS-MT、KT-SETS-MT.仿真结果表明,窄带条件下,所提3 种方法均能实现雷达目标距离走动校正.KT-FCTS-MCZT 方法计算量最小,但存在频点丢失问题;KT-SETS-MT 方法无需模糊数补偿,但对信噪比要求较高;KT-FCTS-MT 方法抗噪性能最优,但计算量最大.另外,对梅林变换的功能开发和快速算法的改进是下步工作重点.