反安定面展弦比对近距耦合鸭式布局导弹气动特性影响的数值研究
2022-07-01吕代龙陈少松徐一航邱佳伟
吕代龙,陈少松,徐一航,邱佳伟
(南京理工大学 能源与动力工程学院,江苏 南京 210094)
近距格斗型空空导弹是现代夺取制空权的主要武器,具备大过载、大离轴角等基本特点。随着战术性能指标要求的提高,对导弹的高效灵活性也提出更大的要求。而在鸭式布局导弹的鸭舵前方添加一组反安定面,构成双鸭式布局,其产生的近距耦合效应可以改善导弹大攻角的气动性能,为提高近距导弹的机动性和操纵性、特别是大攻角和过失速机动能力提供了重要的有利条件。
上世纪80年代开始,国内外学者针对飞机鸭翼的近距耦合现象进行了一系列的研究。文献[1-4]通过简化鸭式布局模型的低速风洞实验表明,小迎角范围内鸭翼涡对机翼前缘涡的下洗可以减小其实际迎角,抑制机翼涡的发展。FINKLEMAN对平板三角翼鸭式布局中鸭舵对主翼面的涡系干扰进行了模拟。随后TUNCER和PLATZER对翼身组合体鸭式布局在大攻角下有无鸭翼对比,通过求解N-S方程进行了数值模拟,可以得出鸭翼涡可以显著延迟主翼涡的破裂。王保兴通过分析“魔术”R550导弹气动特性的特点,得出了双鸭式气动布局能够获得更大的机动性和更快的响应速度的结论。刘沛清等通过水洞实验对近距耦合效应进行了研究,直观地显示了流动现象;之后刘沛清等通过数值模拟研究了涡系干扰的流动机理。
目前,国内外关于近距耦合气动特性的相关研究主要集中在飞机上,针对而双鸭式布局导弹近距耦合气动特性的相关研究相对较少。通过气动分析,双鸭式布局的近距耦合效应与展弦比、反安定面的安装位置及两鸭舵的距离有关。由于大攻角下鸭舵涡系干扰机理的复杂性,实验测量较为困难,因此本文采用数值计算方法,对不同展弦比、马赫数和攻角条件下的双鸭式导弹布局近距耦合气动特性进行研究。
1 计算方法与研究对象
1.1 研究对象与网格划分
本文设计了4种鸭式布局模型进行对比分析,具体模型如图1所示,其中C1、C2和C3模型的反安定面展弦比分别为0.3、0.6和0.9。两鸭舵与弹体呈“×”字型布局,模型直径为为165 mm,模型长为17。由于4种模型只在反安定面部分有差别,故只给出C0模型全弹示意图,其中RC表示鸭舵,FC表示反安定面。图2为鸭舵的详细示意图,以C1模型为例,其中攻角与舵偏角都以轴正向为参考正向。计算选取参考长度为,参考面积为,参考坐标系取弹体系。远场静压101.325 kPa,静温288.15 K。
图1 模型示意图
图2 鸭舵示意图(C1模型)
采用ICEM软件对模型进行网格划分,计算域的长度参考导弹长度,轴向长度为20,径向长度为30,纵向过渡比为12,壁面第一层网格高度由≈1确定,网格量约为600万。以C1和C0模型为例,三维六面体网格如图3所示,(a)为C1模型,(b)为C0模型。
图3 模型网格(C1与C0模型)
1.2 计算方法
本文采用CFD方法来计算弹体周围流场的三维可压缩非定常Navier-Stokes方程:

(1)
式中:为控制体,∂为包围控制体的封闭表面,为控制体表面的面积,为守恒变量矢量,为对流通量矢量,为黏性通量矢量。采用雷诺平均N-S方程为流动控制方程。空间离散采用二阶迎风格式,对流通量应用Roe通量差分分裂。非定常计算采用双时间步法,其中物理时间描述实际运动,内迭代时间使计算收敛,二者皆采用隐式迭代求解。为了提高计算效率,定常状态的计算结果作为非定常结果的初始条件以加快收敛。
1.3 湍流模型的选择及计算的准确性
选取C1模型,舵偏角为10°,远场边界为压力远场边界条件,模型边界设置为壁面无滑移边界条件,来流工况为=20、攻角为0°~45°,采用S-A模型、-模型、Transition SST模型和LES模型4种不同的湍流模型进行对比。选取各计算模型的RC4法向力系数和全弹俯仰力矩系数,仿真结果见图4。为了与文献[11]所研究的切尖三角翼实验数据进行对比,该结果选取的参考面积为鸭舵面积,仿真结果与实验数据趋势大致吻合。可以看到在计算攻角范围内,Transition SST模型比其他两种模型更加吻合LES模型,因此本文选择Transition SST湍流模型进行后续计算。
图4 湍流模型气动特性计算结果
1.4 无关性验证
本文对C1模型划分了3套网格进行网格无关性验证,分别为400万,600万和800万,来流为2.0,攻角为10°,计算结果如表1所示。选取了两组时间步长,其无关性验证结果如表2所示。表中:为全弹法向力系数,为全弹轴向力系数,、分别为全弹法向力系数与全弹轴向力系数相对差值。根据计算结果可知,600万网格量的结果与400万网格量相差较大,而与800万网格量的结果十分接近,仅相差1%之内;时间步长为5×10s和1×10s的结果最大相差2.7%。因此选用600万网格量,5×10s的时间步长进行计算可以满足计算对网格密度和时间精度的要求。
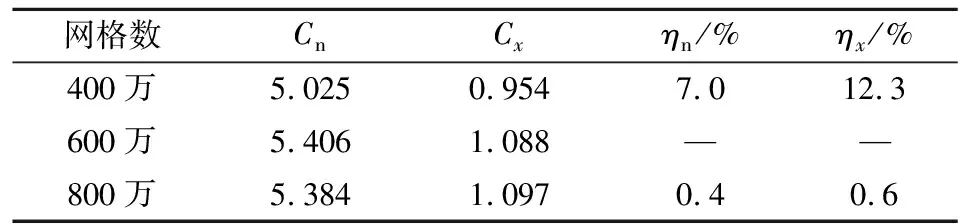
表1 网格无关性验证

表2 时间步长无关性验证
2 亚音速条件下近距耦合效应
图5为4种模型鸭舵的法向力系数在=0.5条件下随攻角的变化曲线。可以看出,在不同的攻角范围内,双鸭式布局涡系之间干扰的机理也不同。本文为了研究计算结果的方便,根据亚音速下流动特征将攻角计算域分为了小攻角(≤15°)、中大攻角(15°<≤30°)和失速攻角(>30°)3种情况。
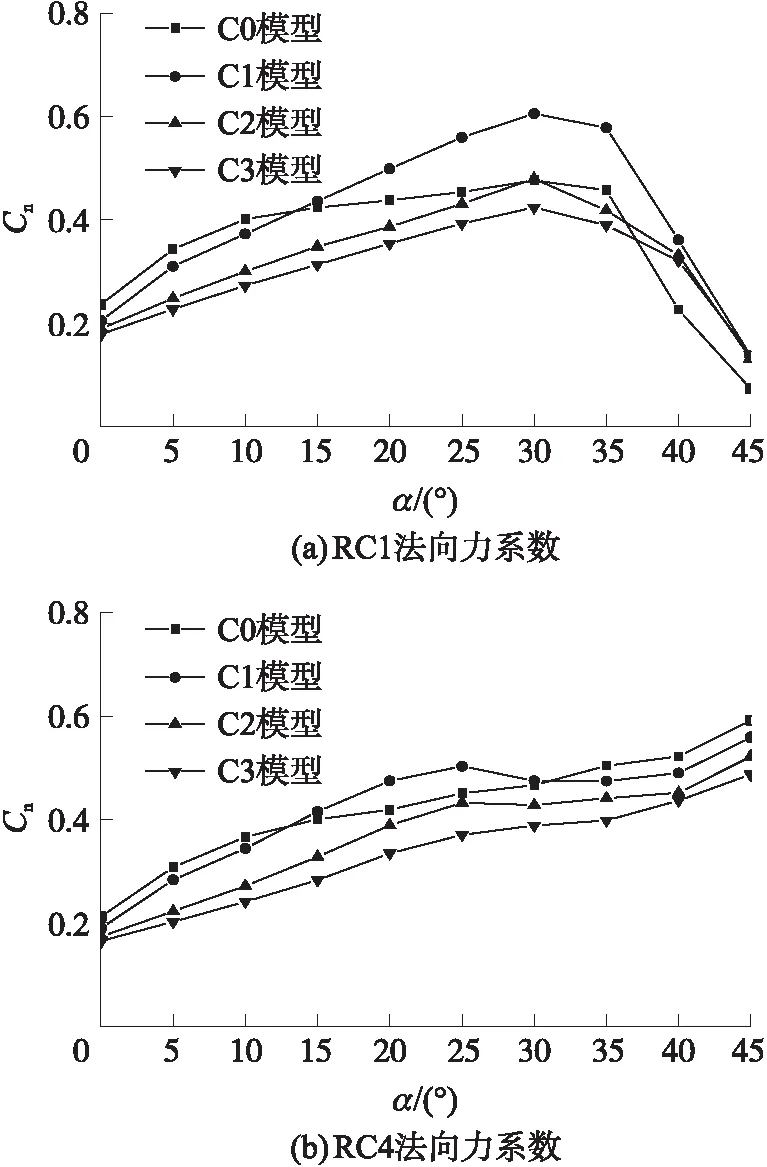
图5 Ma=0.5时鸭舵舵面法向力系数
对比图5(a)中4个模型可以看到,当≤15°,3种模型的RC1法向力系数都较C0模型小,这表明在小攻角范围内双鸭式布局对法向力的提升起到了抑制的作用。在中大攻角范围内,只有C1模型的法向力系数与C0模型相比变大,特别是在30°攻角附近其提升了27%左右;在失速攻角,舵RC1开始发生失速现象,3种模型的法向力系数逐渐都开始比C0模型大,其中C1模型的提升效果最好。从图5(b)中可以得到,与舵RC1相比,RC4的提升效果较弱,在中大攻角范围内,只有C1模型的法向力系数优于C0模型,而C2与C3模型都未对法向力产生积极的作用。
2.1 小攻角范围内流动分析
图6为15°攻角时4种模型舵RC1的流线图。可以看出,与C0模型相比,C1模型上表面压力系数降低。这是由于FC1产生的翼尖涡流向RC1的上表面,挤压了原本流线的流动通道,流动速度增加,使其流过上表面时压强降低。而C2模型与C3模型产生的翼尖涡在流向RC1上表面时逐渐靠外,对原本流线的挤压作用减弱,相较于C1模型上表面压力系数有所提高。同时可以看到,流经FC1的部分流线流向RC1的下表面,使RC1上表面涡量减小,环量减小,降低了C2模型与C3模型的RC1法向力系数。
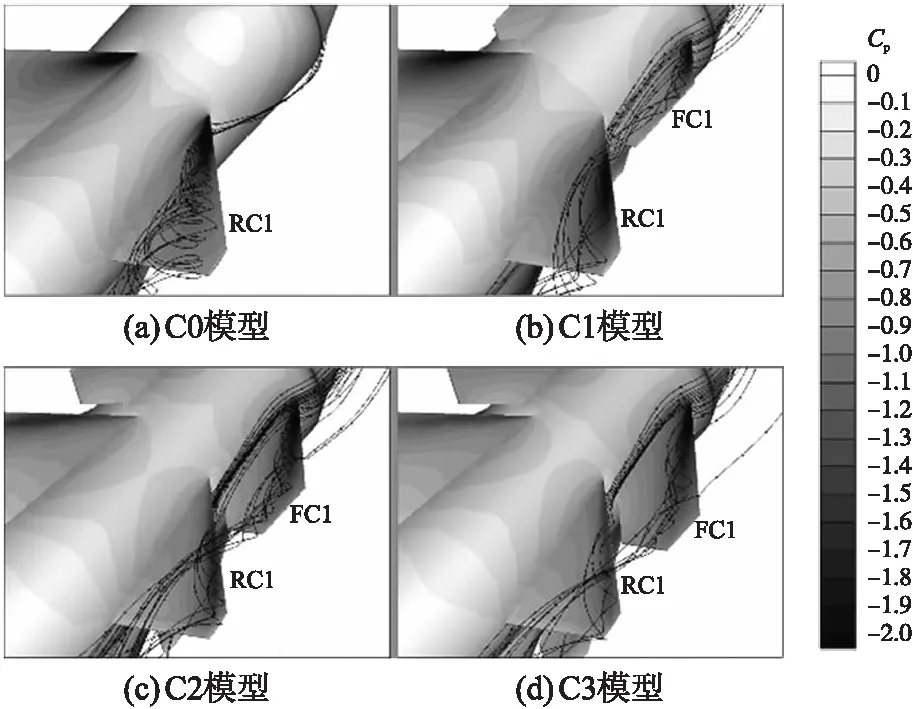
图6 15°攻角RC1空间流线分布
2.2 中大攻角范围内流动分析
图7为30°攻角时舵RC1的上表面压力系数分布云图。与C0模型相比,其他3种模型RC1的上表面压力系数都降低,而C1模型RC1上表面的压力系数最小,效果最好。对比图8流线图可以看到,C1模型中舵FC1产生的FC1涡与舵RC1产生的RC1涡产生了卷绕耦合,涡量增加,使环量增加,法向力提高。C2模型与C3模型的FC1也同样产生了FC1涡,但未与RC1涡在RC1上表面区域产生有效的卷绕耦合。可以看到随着反安定面展弦比的增加,FC1涡逐渐向外移动,与RC1涡进行卷绕耦合的范围也逐渐向后移动。图9为RC1上表面涡量图,可以清晰地看到涡系间的融合现象。由于C2模型与C3模型FC1涡在RC1外侧的挤压,使RC1涡的流动通道变窄,继而流动速度增大,降低了其上表面的压强系数。
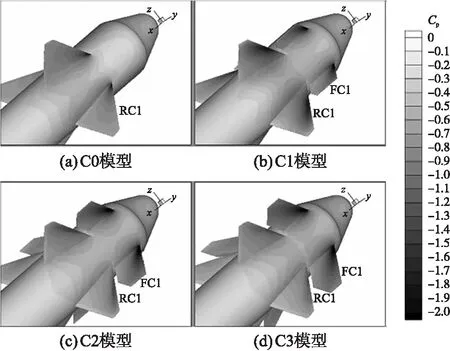
图7 30°攻角背风面压强系数
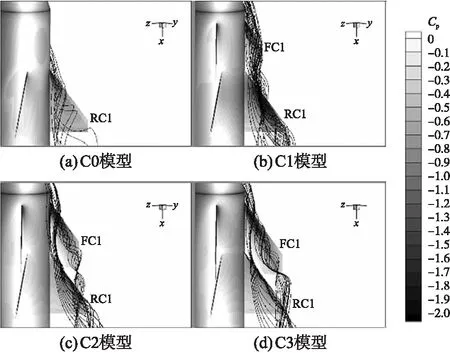
图8 30°攻角RC1空间流线分布
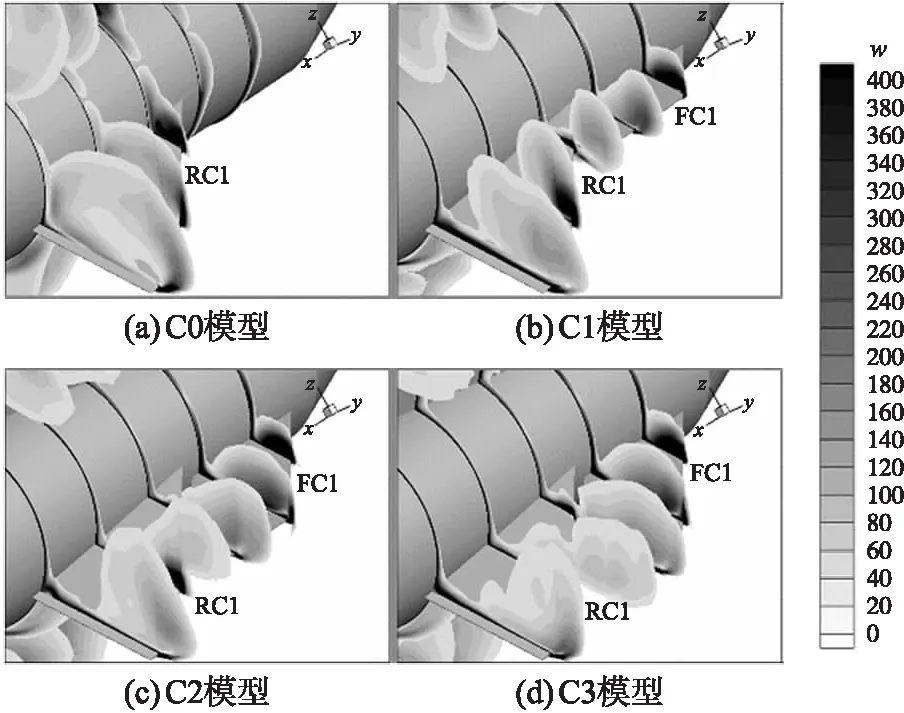
图9 30°攻角RC1上表面涡量
2.3 失速攻角以后的流动分析
图10为40°攻角时舵RC1的上表面流线图。此时鸭舵已处于失速状态,C0模型的流经RC1的流线已经出现了杂乱无章的运动,表明流动涡已经产生了破裂。C1模型在两舵间近距耦合效应的作用下,虽然融合涡在根弦后半部分开始出现破裂的迹象,但是仍然保持着一个涡的流动形态,也没有出现较强的分离涡,使RC1上表面的压力系数降低。而从C2模型与C3模型可以看出,随着展弦比的增加,流动涡在FC1上表面开始分离,涡强逐渐减弱,并逐渐向上缓慢移动,在流至舵RC1后,挤压了流动通道,使原本分离的RC1涡重新贴合舵面,导致压力系数在图10中②处减小。而在图10中①处可以看出压力系数增加,这是由于FC1阻碍作用,使该处流速减小,压强系数变大。流经RC1的FC1涡强随着展弦比的增加逐渐减小,对原本流动通道的挤压作用也减弱,继而对上表面压强系数的减小程度同样降低。
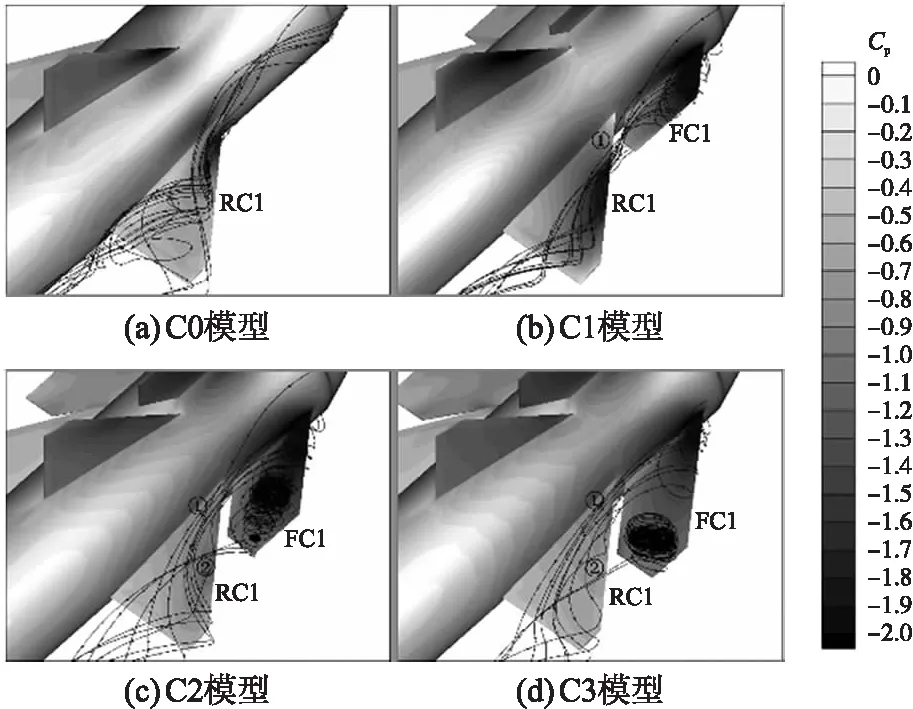
图10 40°攻角RC1空间流线分布
综上所述,亚音速条件下,小攻角范围内以涡系的相互挤压作用为主。其中反安定面展弦比为0.3时,=15°左右开始对鸭舵升力起到正贡献。在中大攻角范围内展弦比为0.3时两鸭舵涡变为卷绕合并作用,提升了鸭舵升力。随着展弦比的增加,融合涡逐渐向外移动,受到反安定面涡的挤压作用变强。在失速攻角范围内,反安定面对鸭舵产生了有利的影响,抑制了流动分离,并随着反安定面展弦比的增大效果逐渐降低。
3 超音速条件下近距耦合效应
图11为4种模型的鸭舵法向力系数在=2时随攻角的变化曲线。同样为了研究计算结果的方便,根据超音速下的流动特征将攻角计算域分为中大攻角(15°≤<30°)和大攻角(≥30°)两种情况。
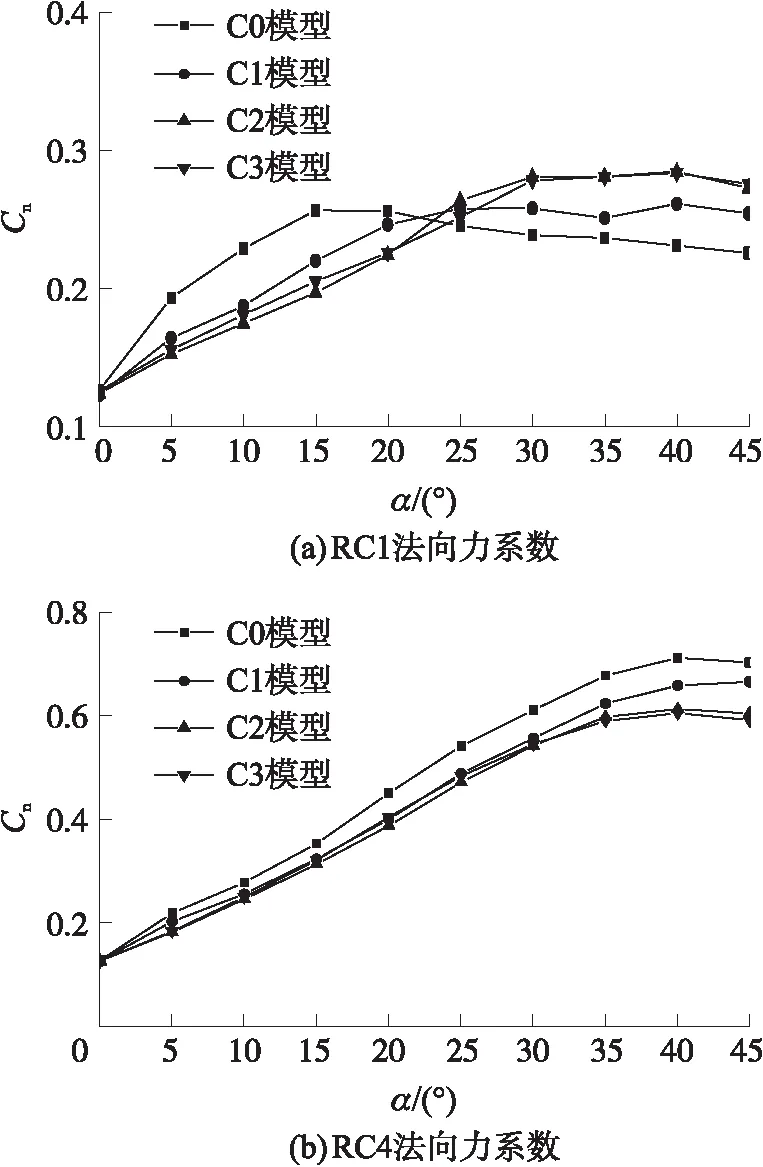
图11 Ma=2时鸭舵舵面法向力系数
对比图11中的RC1法向力系数曲线可以看出,鸭式布局在0~15°攻角范围内随攻角增大,之后逐渐减小;而双鸭式布局在30°左右达到最大值,这说明双鸭式导弹布局可以有效的延迟流动分离,增大实际攻角。在0~25°范围内鸭式布局的值较大,在25°攻角之后,双鸭式布局的值相对较大,其中C3模型提升效果最好,为20%左右,这表明双鸭式布局产生的近距耦合效应在大攻角下能够提升鸭舵舵面法向力,且效果随反安定面的展弦比增加。而对于RC4法向力,双鸭式布局对其有小幅度的降低,未对法向力产生积极的影响,其中C1模型较于其他模型法向力系数降低的少。
3.1 中大攻角范围内流动分析
图11表明在超音速条件下,≥30°时近距耦合效果作用最强,所以本节以=30°工况为代表,对比4种模型RC1的表面压力系数分布规律,分析展弦比对近距耦合效应气动特性的影响机理。
为了方便对计算结果进行研究,沿鸭舵展向选取了不同的剖面。如图12所示,其中RC1的展长为,弦长为。图12中给出了沿鸭舵展向的3个不同纵向剖面位置,分别为0.2,0.5,0.8。
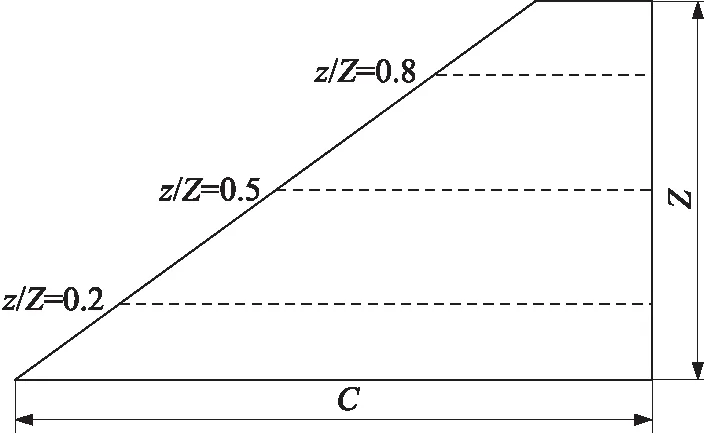
图12 鸭舵展向剖面位置
图13为在=2,=30°条件下4种模型沿鸭舵展向3个纵向剖面位置的上、下表面压强系数的分布曲线。可以看出超音速条件下反安定面对鸭舵上表面的影响作用很小,这是由于当速度达到超音速条件下,反安定面产生的后缘涡的涡强度很小,对鸭舵上表面的气动干扰很弱。
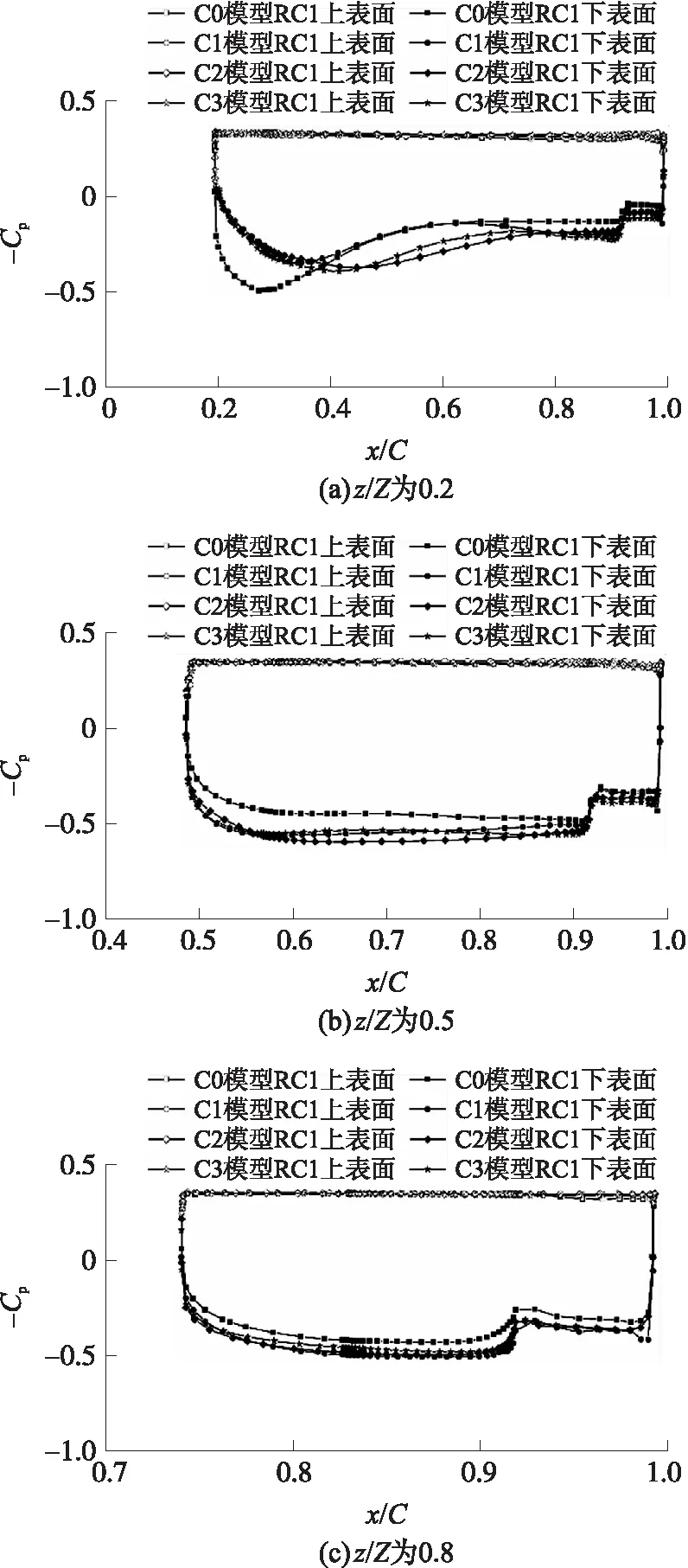
图13 RC1不同展向剖面压力系数曲线
由图13(a)可以看出,双鸭式布局的鸭舵前缘与鸭式布局相比上下表面压差减小,说明双鸭式布局RC1前缘受到反安定面的下洗作用。在=0.4之后,与C0模型相比,其他3种模型的RC1上下表面压差变大,说明在此位置之后,反安定面产生的涡流产生了积极的影响。同时C2模型的下表面压强系数提升效果最好,表明反安定面的展弦比为0.6时对鸭舵的耦合效应相对较好。
综上所述,在超音速条件下,中大攻角范围内反安定面产生的下洗作用降低了鸭舵的法向力;在大攻角范围内,随着展弦比的增加,鸭舵法向力先增大后减小,反安定面在展弦比为0.6左右时耦合效果较好。
4 全弹气动特性影响
4.1 亚音速条件下反安定面展弦比对全弹的气动影响
图14为全弹的法向力系数在=0.5时随攻角的变化曲线。在20°攻角之后,与C0模型相比,3种模型的法向力系数增加,为了比较3种模型的提升效果,定义法向力增长比为
(2)
式中:Δ为该模型较于C0模型的法向力系数增长量,为该模型的反安定面面积。分别计算>20°的3种模型的值,得到为317,为196,为1.91,即C1模型的单位反安定面面积的法向力提升效果最好。
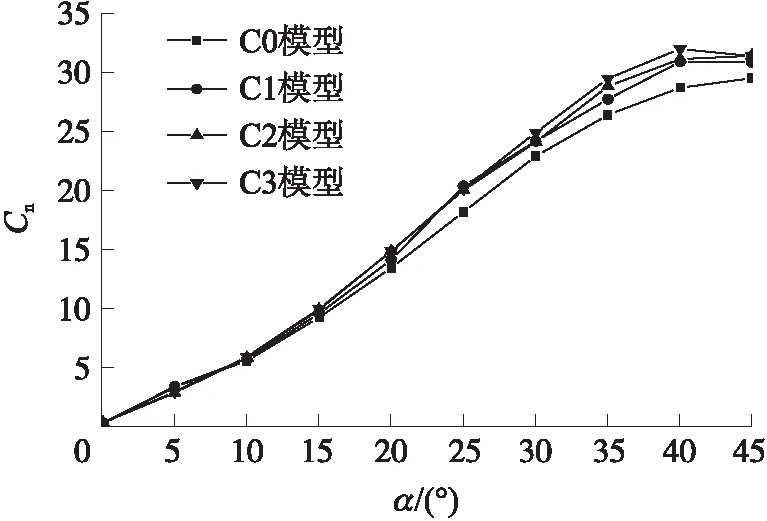
图14 Ma=0.5时全弹法向力系数
由于反安定面使全弹压心向前移动,进而降低俯仰力矩系数和稳定性,提高了操纵性。图15为舵偏角=10°时全弹俯仰力矩系数随着攻角的变化曲线。力矩参考点为距弹头8.5处,可以看出4种模型的俯仰力矩系数变化趋势相同,都随着攻角增大而减小,这说明在攻角增大时,4种模型都产生稳定力矩或有产生稳定力矩的趋势。随着反安定面展弦比的增加,俯仰力矩系数绝对值逐渐降低,全弹静稳定性降低,可以得到C0模型的平衡攻角为12°,3种模型的全弹平衡攻角相比于C0模型分别增加了3°、5°和7°左右。在25°攻角之后,3种模型的俯仰力矩系数比C0模型提升的效果显著,能够有效提升操纵性。
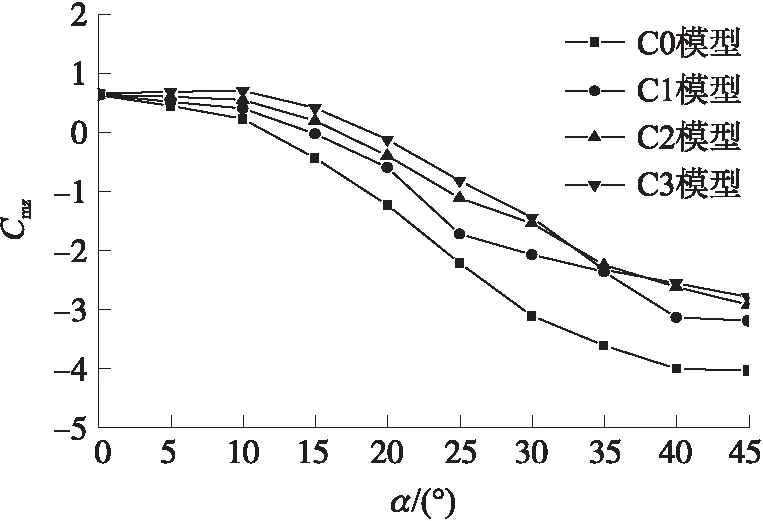
图15 Ma=0.5时全弹俯仰力矩系数
4.2 超音速条件下反安定面展弦比对全弹的气动影响
图16为全弹的法向力系数在=2时随攻角的变化曲线。双鸭式布局模型的全弹法向力相较于亚音速条件下提升较小,根据仿真结果计算3种模型值,得到=049,=091,=074,说明C2模型对法向力的提升效果比其他模型较好。
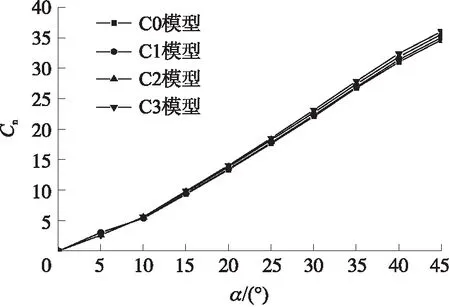
图16 Ma=2时全弹法向力系数
图17为4种模型的俯仰力矩系数曲线。力矩参考点为距弹头8.5处,与亚音速条件下原因相同,同样由于反安定面的存在使俯仰力矩系数绝对值减小。在小攻角时俯仰力矩系数变化不是很大,提升了2%~4%,但随着攻角增加降低的幅度逐渐增大,到45°减小了15%左右;随着反安定面展弦比的增加,平衡攻角逐渐提升,其中C3模型提升了5°左右,这说明双鸭式布局的稳定力矩减小,降低了稳定性,对导弹的俯仰操作有利。
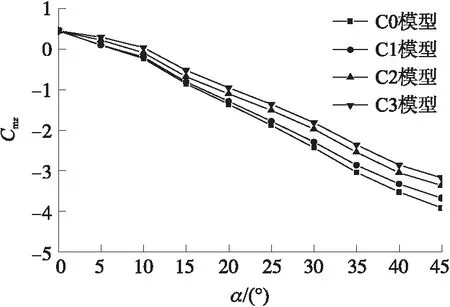
图17 Ma=2时全弹俯仰力矩系数
综上所述,在亚音速条件下,C1模型增加的反安定面单位面积对全弹法向力的提升效果较好,同时双鸭式布局导弹静俯仰操纵性提高,当反安定面展弦比为0.3、0.6和0.9时,全弹平衡攻角分别增加了3°、5°和7°左右,提高了操纵性;在超音速条件下,当反安定面展弦比为0.6时提升效果较好,双鸭式布局模型减小了俯仰力矩,提升了操纵性,反安定面在展弦比0.3~0.9范围内随着展弦比增加,提升效果越好。
5 结论
本文分别对反安定面展弦比为0.3、0.6和0.9的双鸭式近距耦合布局导弹模型与鸭式布局导弹模型在亚音速和超音速下的气动特性进行了数值模拟,得到不同攻角下的气动参数。对4种模型的流动特征进行对比分析,研究两鸭舵近距耦合机理,得出如下结论:
①亚音速条件下,小攻角范围内以涡系的相互挤压作用为主,其中展弦比为0.3时,15°左右开始对鸭舵升力起到正贡献;在中大攻角范围内展弦比为0.3时两鸭舵涡变为卷绕合并作用,提升了鸭舵升力,随着反安定面展弦比的增加,融合涡逐渐向外移动;在失速攻角以后,反安定面对鸭舵产生了有利的影响,抑制了流动分离,并随着展弦比的增大效果逐渐降低。在计算攻角范围内,反安定面展弦比为0.3时提升效果较好。
②超音速条件下,中大攻角范围内反安定面产生的下洗作用降低了鸭舵的法向力;在大攻角范围内,随着展弦比的增加,鸭舵法向力提升效果先增大后减小,反安定面在展弦比为0.6左右时耦合提升效果较好;
③从全弹效果而言,亚音速条件下安定面展弦比为0.3时对法向力的提升效果较好,超音速条件下,反安定面展弦比为0.6时提升效果较好;由于添加了反安定面,全弹压心向前移动,增加了全弹的平衡攻角,提升了操纵性,并在反安定面展弦比0.3~0.9范围内随着展弦比的增加,提升效果增加。
