三维激光扫描技术在建筑物立面测绘中的应用
2022-06-27万建鹏叶素倩
万建鹏,叶素倩,陈 敏
(1. 广东省核工业地质局测绘院,510800,广州;2. 广州开发区土地开发储备交易中心,510700,广州)
0 引言
建筑立面图[1-2]是建筑物在与其立面平行的投影面上所得的正投影图,精确绘制的立面图可以清晰地反映建筑物的外部特征,是城市市容规划改造、古建筑外部装修重建等工程中施工设计的关键依据。传统测量方法[3-4]一般通过全站仪极坐标单点测量的方式,对建筑物各个立面的特征点进行数据采集,局部区域还需借助皮尺、测距仪等工具进行人工测量,存在耗时长、费用高、效率低、精度无法保证等缺点,给立面测绘增加了很大难度。无人机航测[5]虽然能快速获取建筑物三维信息,但在数据采集、数据处理、数据精度上都存在相关问题,且精度难以保证。三维激光扫描技术是通过激光扫描获取大面积点云数据的测绘技术,又称为高清晰测量技术,经过近年技术的高速发展,在变形监测[6]、建筑工程[7]、文物保护[8]等领域的应用越发广泛。三维激光扫描仪通过激光脉冲发射高密度、带有反射率信息的海量点云,在不接触被测目标情况下,实现了三维点云数据的快速采集,在内业处理中通过软件可在点云中快速提取目标的线、面、体等空间结构信息,重构出实体目标的真彩色的三维模型。基于三维点云数据的建筑物信息提取方法克服了传统立面测绘方式的缺点,能在复杂空间中对各类规则与不规则的建筑实体进行快速作业,具有时间短、数字化、精度高、智能化等的突出优点,更快、更便捷地获取建筑物立面的制图数据,为城市规划、建筑物保护等后续实施工作提供基础测量数据。
1 三维激光扫描技术
1.1 工作原理
目前市场上三维激光扫描仪的产品种类较多,在工程应用中各具特点,本文基于FARO Focus仪器展开研究。FARO Focus系列三维激光扫描仪是美国FARO公司近年来研发的新型仪器,其测量原理是通过激光束发射传递到镜头中央,通过镜头的高速旋转将激光发散到目标物体,接触物体后及时将激光位移数据反馈回扫描仪,得出激光和物体之间的距离,再利用调制技术和角度编码器测量镜头和扫描仪两者旋转的角度,获得各激光点的三维坐标。Focus系列扫描仪的主要技术参数如表1所示。
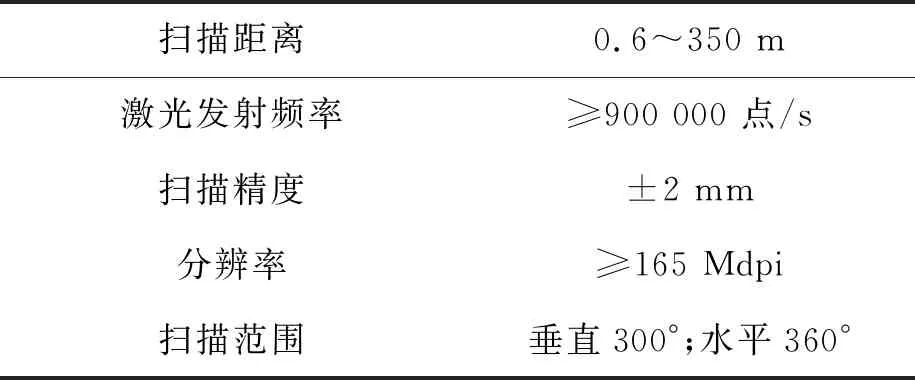
表1 Focus系列扫描仪的技术参数
1.2 技术路线
采用FARO三维激光扫描仪进行建筑物立面测绘技术路线如图1所示,其主要分为测量前资料的收集与技术方案编写、外业数据采集、内业点云数据处理、立面图绘制以及精度评定等。
1.3 三维数据采集
作业前应对设备进行检验,仪器部件是否齐全,运转是否正常,电池容量、内存容量是否充足,当环境条件较为恶劣时,要提前对仪器进行预热,避免逆光拍摄。作业时,扫描应均匀布设,设置在视野开阔、稳定的安全区域,合理的测站可减少数据的冗余,利于后期数据处理,开始作业时要根据站点到目标的距离,精度要求设置好扫描仪的扫
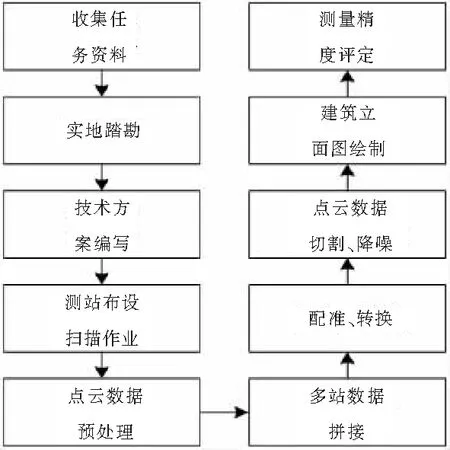
图1 技术流程图
描范围、采集分辨率才开始扫描,每站间的点云重叠率≥20%,区域分块扫描时,相邻点云数据的重叠度≥10%。标靶布设是确保多站数据完整拼接的基础,在每站扫描仪的有效视场内标靶布设要合理,避免盲区的建立,盲区会加大后期建模难度,其精度也会下降,要减少重复扫描区域,重复区域过多,既增加扫描工作量,又增加后期点云处理以及建模的工作量。
1.4 数据处理
数据处理主要包括点云拼接、坐标转换、降噪抽稀、数据裁剪等工作。
1.4.1 点云拼接 由于测区范围过大,只在一个测站无法获取研究对象全部点云数据,需要将不同测站的点云数据进行拼接,每站采用3个同名点进行点云拼接,一般以作业时布设的靶球为同名点。
1.4.2 坐标转换 通过测得的标靶的三维坐标值,采用七参数法将FARO三维激光扫描仪扫描得到的点云网格中的三维数据转换为实际控制测量系统的三维坐标。
1.4.3 降噪抽稀 作业时由于存在环境因素的干扰,使获取的点云数据中存在异常,可采用软件自带的滤波算法或人眼识别手动进行点云数据降噪处理;点云数据冗余既增加了软件展现负担,又对目标特征的提取没有太大帮助,可对点云数据进行抽稀处理,但应以满足制图要求为原则,根据局部特征可采取均匀抽稀或保留特征进行抽稀。
1.4.4 数据裁剪 在软件中可将目标范围内点云数据识别出来,确定边界范围后,运用软件裁剪功能将点云数据进行裁剪,或根据对建筑物不同立面测绘的需求,运用软件的分割功能,将点云进行分割,得到可制图的点云数据。
1.5 成果输出
得到可以进行制图的点云数据后,一般可将点云数据运用相关插件直接插入到AutoCAD中,运用其强大的绘图功能,根据GB/T 50104—2010[9]建筑制图标准相关要求,对建筑立面图的绘制进行立面图形的绘制。根据项目要求,对建筑物的外部特征进行重点或侧重点描绘,绘出整体轮廓。再对成果进行精度评定。
2 工程实例
本文以广东某地古村落建筑的保护项目为例,该村属于民间文化遗产重点抢救对象,经过现场探勘和研究,建筑的年代较为久远,墙体结构较为脆弱,采用常规测量该项目无法达到业主方的时间和精度需求,故采用三维激光扫描技术进行立面测量。目标建筑的现状如图2所示。

图2 目标建筑的局部图
2.1 数据采集与数据处理
在现场踏勘得出,本次项目的古建筑群边临灌溉渠,只能在渠道对岸利用三维激光扫描仪进行数据采集,但采集范围不大,主要进行绘制街道一侧建筑群的立面图。项目采用 FARO350地面站式三维激光扫描仪,扫描点云间隔为2 mm,站点间距控制在5~10 m,建筑物间外部细节较为相似,两站之间保持30%以上的重叠度,使每个站点都能扫描到现场设定的靶球。由于扫描仪扫描距离较远,根据现场地势特征,前半部分在对岸高楼通视处布设多个扫描站,后半部分在对岸的地面合适处布设扫描站点。数据采集完毕后,将内存卡中数据导入到FARO配套软件SCENE中,部分站点的测站点云如图3所示。
在SCENE中进行多站点云数据的拼接,软件可自动识别靶球位置进行点云拼接,识别出错也可手动标定靶球位置进行点云拼接。根据建筑物周边的测量控制点,采用全站仪测定起始站或中
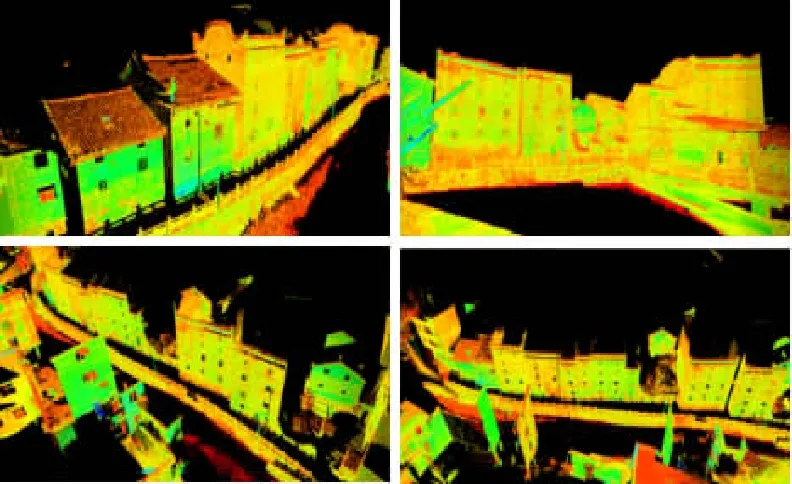
图3 部分站点的测站点云
间3个同名靶球的坐标,经过坐标转换后将控制测量坐标系引入到三维点云中,从而将多站点云数据整合配准到同一个坐标系中,方便在软件中实现点云数据的自动精确配准, 配准过程中控制站间误差在2 mm以内,满足立面线画图的要求。经过处理得到拼接后的建筑物群实景点云数据,如图4所示。
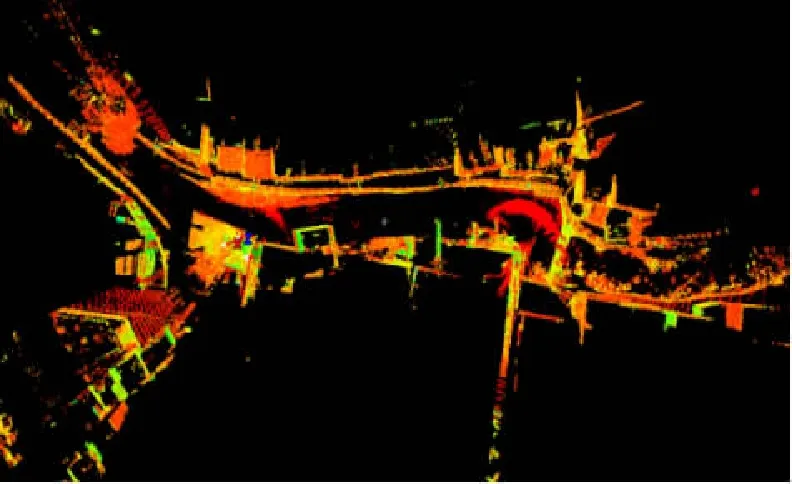
图4 测站点云拼接成果俯视图
配准拼接后得到的点云成果还需要进一步处理,根据工程的精度要求,对拼接的原始点云进行抽稀,减轻存储和数据处理的压力,再对点云数据进行优化,去噪可在SCENE软件中使用其自带的数据平滑功能进行降噪,或结合肉眼识别,使用软件中的框选工具等方法手动剔除非目标信息,再对整体的数据进行裁剪,得到目标区域的完整点云数据,如图5所示。
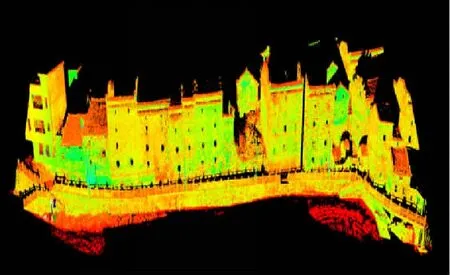
图5 目标区域的点云数据
2.2 立面图绘制
立面图能具体体现出建筑物基本形状和特征的轮廓构成。将三维点云进行处理完成后,将特征点云数据导出至AutoCAD中,结合正射影像图、点云数据的建筑物轮廓线、特征点、线、面等绘制建筑物的立面线画图,实际绘制时,参考实地踏勘拍摄的特征照片进行验证校对,以确保建筑物立面信息的正确性,绘制的建筑立面细节如图6所示。
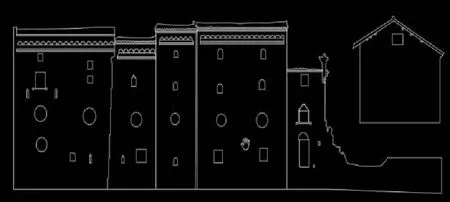
图6 建筑物立面细节
3 测量精度分析
FARO FUCUS系列三维激光扫描仪测距、测角的标称精度较高,但在实际扫描作业过程中,受到环境影响,其测量精度会受不同程度的影响,为验证本次数据采集的精度,选取多站中的9个靶球位置作为校验点,其中靶球位置坐标用全站仪测出,高程用GPS的RTK测量模式测取,将实测的三维坐标(x,y,H)与点云数据中各站标靶位置进行对比,各个检测点平面与高程误差统计表如表2所示。
根据各项的误差△e,用公式(1)可得到平面中误差与高程中误差。
(1)
可得σx=0.025 m,σy=0.026 m,σH=0.019 m,σs=0.037 m,结果满足《GB 50026―2016工程

表2 平面误差与高程误差统计表/m
测量规范》中对建筑立面图平面和高程中误差的限差要求,表明本次三维激光扫描数据采集的成果其精度满足要求。在AutoCAD中进行建筑物立面图测绘,其基础就是符合精度要求的点云数据,当外业采集的点云数据符合精度要求后,为更好地验证立面尺寸信息的准确性,可通过提取立面图中特征线的长度与实地激光测量的长度进行对比,来验证绘制的立面图的误差大小是否满足精度要求。统计结果如表3所示。
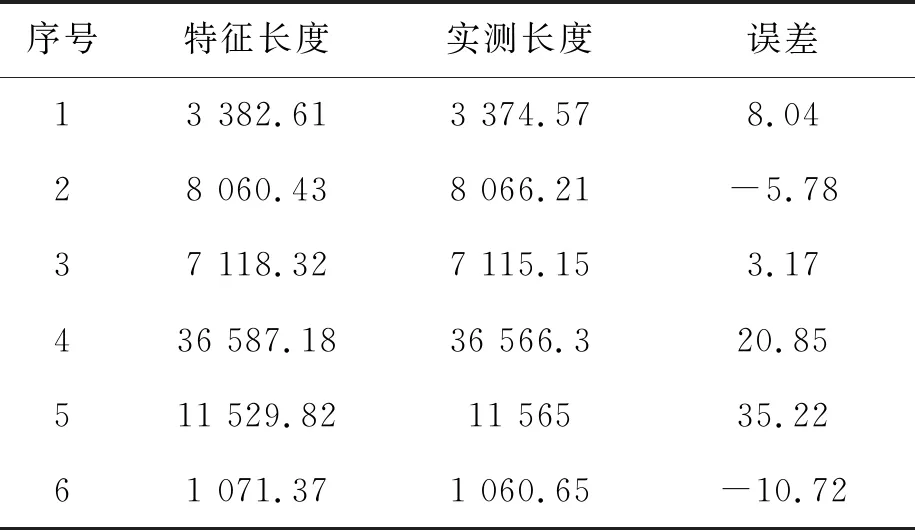
表3 立面图特征相对误差统计表/mm
由误差统计可知,其均误差为8.46,即其边长间距精度为 8.46 mm,按照国标规范要求,非常满足古建筑物保护立面测绘要求的,同时由误差统计表明,误差不随边长尺寸的积累而叠加,因为立面线画图精度是以点云数据为基础的,不同区域点云质量会影响立面图的精度。
4 技术总结
本文探讨FARO三维激光扫描技术在建筑物立面测绘中的应用,阐述了外业作业流程以及内业数据处理步骤,通过广东省某古建筑保护工程的实践为例,对三维激光扫描在建筑物立面测量中的应用展开了实例说明,对外业数据采集和内业数据处理方法进行了总结,对测量成果的精度进行了验证,表明三维激光扫描仪在建筑物立面测绘中能发挥高效率、高精度、更智能、更便捷的特点,很好地满足项目的需求。通过项目的具体实践,进一步掌握了三维激光扫描技术在建筑工程行业中的应用,为工程上相关从业者提供参考范例,同时为将FARO三维激光扫描仪拓展到相关工程领域内的应用打下坚实基础。对类似项目有借鉴意义。
