基于NLM的电能表视觉检测方法的研究
2022-06-22闻梓涵李彦彰王维佳
闻梓涵,李彦彰,胡 琪,陈 梦,王维佳
(1.三峡大学 电气与新能源学院,湖北宜昌 443002;2.国家电网武汉市供电公司,武汉 430000;3.国家电网瑞昌市供电公司,江西瑞昌 332200;4.国家电网合肥市供电公司,合肥 230000;5.中国启源工程设计研究院有限公司,西安 710000)
引言
我国经济的不断发展使人民生活水平上升,随之对于水、气、电等资源的需求量逐渐增大。目前,电能表的查抄方式主要有人工抄表、无线发射式仪表、IC卡预付费抄表等。传统的人工抄表方式存在很多缺陷,比如成本高、精度低、实时性不足、可靠性差等。无线发射式仪表和IC卡预付费抄表虽然安装简易,智能化程度高,但是,设备成本造价比较高昂,仪表数据传输可能出现故障。如果用户不愿更换新型仪表,那么就无法满足现行系统的要求[1]。所以,近年来也出现了很多基于图像识别的抄表系统。
本研究针对基于图像识别的远程抄表系统中的服务器图像处理模块进行了算法改进,采用NML算法和极大值抑制优化,实现了对图像信息更多的细节处理,从而对后续识别模块提供了更好的预处理效果,可以提高整体装置系统的运行识别效果。
1 系统组成
基于图像识别的抄表系统包括网络摄像头、处理器MCU、路由器、服务器。网络摄像头是装设在现场电表箱柜中,在补光装置的辅助作用下实时拍摄表具图片,并将图像数据传至MCU;MCU利用其内部Flash接收图片数据,再将缓冲区的压缩数据发送至路由器;路由器与终端服务器通过网络协议定时访问,远程传输数据信息;服务器再进行图像解压、预处理、识别及后续的数据显示,系统结构原理如图1所示。
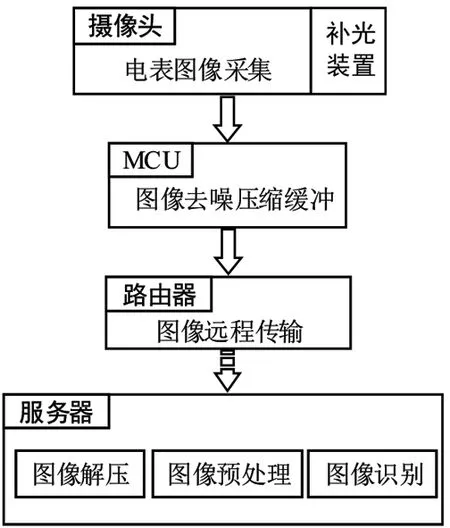
图1 远程抄表系统结构原理图
2 图像处理分析
2.1 传统Canny边缘检测算法
在图像处理过程中应用最广泛的是边缘检测Canny算法,相比于Sobel检测、LOG算子等都有着较为优良的性能,对此Pellegrino[2]做出了试验验证。
2.1.1 高斯滤波
Canny算法的第一步是对灰度图进行滤波平滑处理,采用对信噪比和定位精度乘积最优化逼近的高斯滤波器对影像去噪,其中二维高斯分布的函数表达式为:

式中,σ为标准差,用来控制图像的平滑效果,其值越大平滑越明显。σ值设定较大,适用于强噪声干扰,但会导致定位精度降低,边缘位置偏离;σ值设定较小,检测精度较高但会造成过渡平滑。传统Canny算法中σ值固定,无法兼顾去噪效果和保留图像细节的要求。
2.1.2 计算梯度的幅值与方向
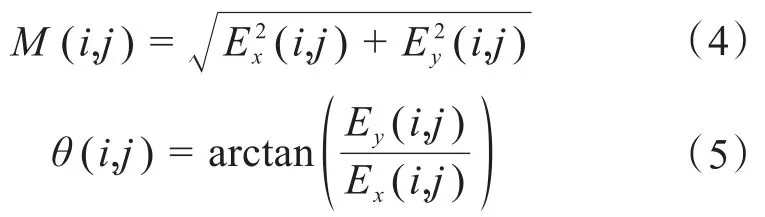
在高斯平滑后,需要对滤波后的图像E(i,j)计算梯度信息,在2×2邻域范围内计算一阶偏导的有限差分是传统Canny算法所使用的计算方法[3]。分别对x、y两个方向进行梯度运算:

得到梯度幅值M(i,j)与梯度方向θ(i,j):
2.1.3 非极大值抑制
非极大值抑制过程的目的是将模糊的边缘变得清晰,从而更加精确地定位。它的基本流程是先排除梯度强度为0的点,然后将剩下的每一个像素点的梯度值与相邻像素点的梯度值比较,保留极大值,保证沿其邻域内的梯度幅值最大,认为其他幅值较小的像素点不作为边缘点。
2.1.4 双阈值选择和边缘连接
经过非极大值抑制之后,图像仍有很多的噪声点。传统Canny算法中应用了一种双阈值技术,即设定一个阈值上界TH和阈值下界TL,如果图像中的像素点大于阈值上界则认为该点必然是边界点,如果像素点小于阈值下界则认为该点必然不是边界点。而介于阈值上下界的像素点被称为边界候选点,需要进一步处理,寻找该点附近邻域内有没有大于阈值上界的点,如果有,则该点也是边界点,如果没有,则该点不是边界点[4]。
2.1.5 传统Canny算法中存在的缺陷
与其他经典边缘算法相比,Canny算法具有优良的检测效果,但其中也存在许多缺陷。高斯平滑中设定的标准差σ固定,其值较大时会增大计算量和边缘信息丢失,反之会产生伪边缘,对噪声的抑制差。在梯度计算方法中,没有考虑更多的方向,造成对噪声敏感,可能检测出很多伪边缘点,致使随后利用非极大值抑制获取单像素边缘也存在一定问题。基于以上问题,针对性地做出了相应的优化改进。
2.2 改进的Canny边缘检测算法
随着视觉技术的进步,诸多学者提出了对Can-ny算法的改进方案。黄慧等[5]提出用平滑聚类滤波代替高斯滤波。芦碧波等[6]提出用双边滤波处理图像。本研究使用NLM代替高斯滤波,同时加入3×3邻域Sobel算子计算梯度和45°、135°方向进行非极大值抑制,通过试验得到了较好的效果。
2.2.1 非局部均值滤波
针对均值滤波、中值滤波、高斯滤波在除噪过程中无可避免地使图像边缘细节和纹理信息被滤除,Buades等提出了NLM算法,它使图像中的冗余信息得到了有效利用,在滤除噪声的同时最大程度地保留了图像的细节特征[7]。NLM利用自然图像中的每个小块都存在关联性,与均值滤波是对邻域内的所有像素求和再平均的方法不同,它先在整幅图像中寻找相似的图像块,再根据图像块的相似度大小来赋予其不同的权值,以此来实现图像去噪。
假定一幅离散的噪声图像为g=g{g(i)|i∈Ω},其大小为N×N,Ω代表图像邻域,i为像素索引,对噪声图像进行NLM处理后可表达为:

这是一个加权平均的过程。式(6)中分母的存在是为了使其归一化,Ωi表示中心像素为i、大小为q×q的搜索区域;ω(i,j)代表赋予噪声图像g(i)的权值,数学形式为:

式(7,8)中:h代表控制滤波平滑程度的滤波系数;N(i)和N(j)分别代表以像素中心点为i、像素中心点为j的图像块,图像块的大小都是p×p;d(i,j)表示图像块N(i)和N(j)之间的高斯加权欧式距离,“⊗”用来表示两个矩阵之间的点乘;Gα是高斯矩阵。使用高斯加权欧式距离的好处是:噪声可能会影响两个图像块之间的相似性计算,采用高斯核函数卷积类似于先采用高斯滤波来滤除噪声,这样后期计算相似度会更准确。
NLM采用的是指数函数的减函数,那么滤波系数h就会对加权核函数的衰减作用有着决定性的作用。如果h取值较大,求取的权值ω(i,j)就会趋于一致使滤波作用等效于均值滤波,去噪的效果由于边缘细节丢失会变得比较模糊;若h取值较小,对噪声的滤除作用不大,图像中会有大量噪声存在,去噪效果不好。h与噪声标准差σ成正比,通常将其取为噪声的标准方差,即h=σ。
2.2.2 非极大值抑制计算改进
传统Canny算子只考虑到水平和垂直两个方向,因此对噪声干扰十分敏感,容易检测出伪边缘,效果不好。李俊山[8]、冯永亮[9]等提出用3×3窗口计算,并加入45°和135°方向,减少了噪声的干扰,但效率低下,计算相对复杂。结合张志鹏[10]、范晞[11]等提出的算法,在四个方向上采用Sobel算子计算梯度幅值和方向,对得到的4个方向梯度求和作为新的水平和垂直轴的梯度值,再求得该像素点的梯度幅值与梯度角度。对应公式如下:

改进后的梯度计算考虑了更多方向上对中心点像素的影响,使定位更加准确,丢失现象少了很多。
相比于传统非极大值抑制方法,本文给出了不同的抑制条件,将中心像素点的边缘强度与沿其梯度方向的其他两点边缘强度对比,如果大于或等于两点中任一像素点的边缘强度,就保留为候选边缘点,否则删去。这样进行多方位比对,不但可以排除更多的伪边缘,还能保留阶梯状边缘和细化屋脊状边缘。
3 试验结果及分析
对文中的改进算法做了试验验证,对比传统Canny算法针对电能表图像处理的试验效果。分别在自然图像下检测了细节边缘的丰富程度。试验环境采用Python3.8编程,Pycharm编译器运行,numpy库等辅助运算实现,电能表图像由湖北宜昌市住宅小区实际获取,试验对比结果如图2~6所示。

图2 原图像
比较图3和图4可知,经过滤波处理后,NLM在去噪的过程中保留了更多细节。对比图5传统Canny边缘检测,图6中本研究的检测算法检测出更为明显的边缘信息,检测出的数字形态更多,主体的轮廓性更加连贯,下部编号的点化细节更加突出,提高了定位的精度,整体效果有了明显提升。

图3 高斯滤波

图4 非局部均值滤波

图5 传统Canny边缘检测

图6 本研究边缘检测算法
4 结束语
在基于图像识别的远程抄表系统中,针对服务器中图像处理边缘检测算法部分,在传统Canny算法的基础上,采用NLM代替高斯滤波进行去噪平滑,以此来保存更多的边缘细节和提高定位精度;然后对梯度计算和非极大值抑制部分做了优化改进,抑制了伪边缘的产生。经试验证明,对现场电能表提取出的图像边缘更加完整丰富,有效检测出了图像的真实边缘,显示了更多的电表数据信息。
