永磁电磁混合Halbach阵列电动悬浮的稳定性控制
2022-06-22张昆仑
罗 成 ,张昆仑 ,王 滢
(1.西南交通大学电气工程学院,四川 成都 611756;2.西南交通大学磁浮技术与磁浮列车教育部重点实验室,四川 成都 611756)
永磁电动悬浮原理为利用永磁体与非磁性导体之间的相对运动在导体中感生涡流,该涡流与空间磁场相互作用产生所需的悬浮力.该系统结构简单,能实现自稳.但永磁电动悬浮由于自身的欠阻尼特性,使得系统在受到外界扰动时易产生振动,且较长时间内不能稳定,严重情况下甚至发生安全事故[1-3].
对于永磁电动悬浮稳定性的研究,国内外学者主要通过增加系统无源阻尼或有源阻尼的方式提高系统悬浮稳定性.郑杰通过解析法证明了在线圈式永磁电动悬浮系统中添加无源阻尼线圈可增加系统阻尼,但线圈轨道的等效电路计算模型不适用于电感难以计算的导体板轨道[4].文献[5-6]通过实验平台直接测量了添加无源阻尼板后的永磁电动悬浮系统电磁阻尼值,并根据测量数据对系统阻尼进行了分析.文献[7-8]提出将电磁铁Halbach阵列与永磁体Halbach阵列同时并行安装于车体,通过电磁铁对EDS (electrodynamic suspension)系统悬浮力进行调节,实现系统阻尼主动控制.但电磁铁与永磁体之间存在磁场耦合,空间磁场难以准确计算.Han等[9]提出了一种电磁永磁间隔排列构成的混合磁阵列,其通过电磁铁可对空间磁场及电磁力进行主动控制,但存在线圈安匝数过大且较难得到精确的解析计算结果.文献[10-12]研究了一种电磁EMS (electromagnetic suspension)和永磁EDS混合磁悬浮系统.其通过永磁EDS提供悬浮力的同时,利用电磁EMS对悬浮力进行动态调节,达到系统阻尼主动控制的效果,但该混合磁浮系统的结构及电磁EMS的控制系统都较为复杂.
基于以上研究,本文对一种永磁电磁混合Halbach阵列电动悬浮系统的稳定性控制进行了研究.首先利用电磁场理论推导出系统悬浮力2D解析式,并对其进行了有限元验证;其次设计了基于气隙反馈的PID控制器;最后基于所设计的控制器,仿真分析了系统在受到外界扰动时的动态悬浮性能,证明了所设计的悬浮控制器可使系统快速实现动态稳定.
1 悬浮力计算
本文所研究的永磁电磁混合Halbach阵列电动悬浮示意见图1.图中:lm为永磁体长度;h为永磁体高度; δ 为线圈所占宽度;w1及w2分别为永磁体和导体板横向宽度;l1及l2分别为阵列和非磁性导体板长度;τ为极距;v为相对速度.为方便阵列模块制造,设h=lm+ 2δ.
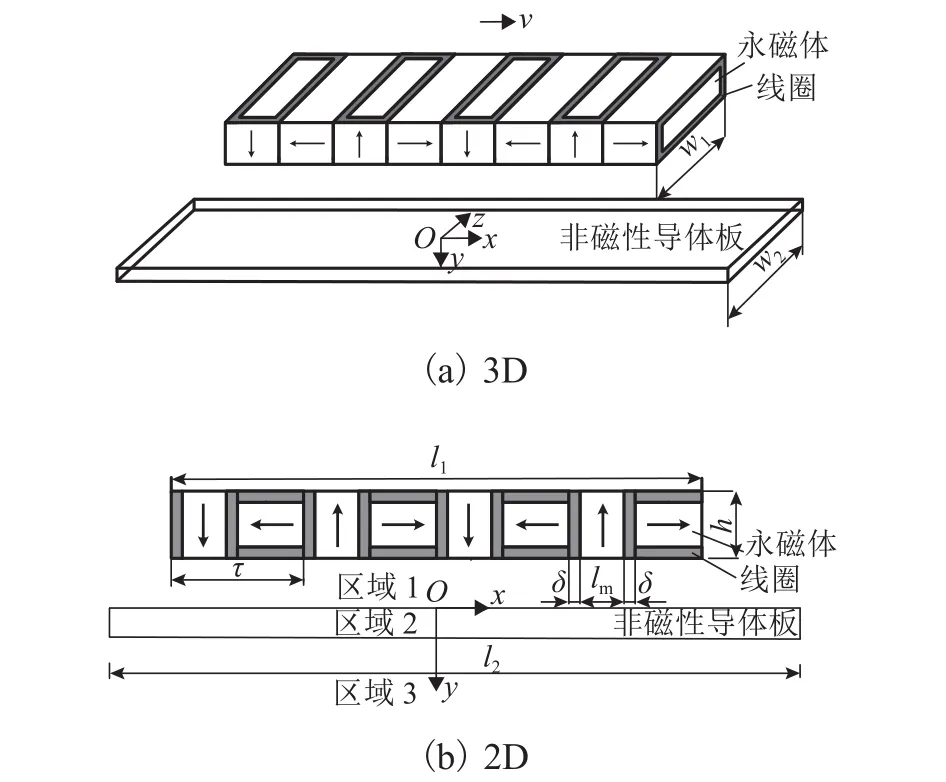
图1 永磁电磁混合Halbach阵列电动悬浮示意Fig.1 Diagram of PM and electromagnet hybrid Halbach array EDS system
1.1 解析计算
如图1所示,由于永磁电磁混合Halbach阵列产生的源磁场含有端部效应和气隙谐波的影响,故需对其进行傅里叶分解,如式(1).
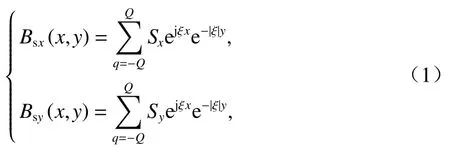
式中:Bsx(x,y)、Bsy(x,y)分别为永磁电磁混合Halbach阵列源磁场傅里叶分解后的x、y分量磁场;Q为谐波次数;ξ=2πq/l2;Sx、Sy为傅里叶系数,如式(2).
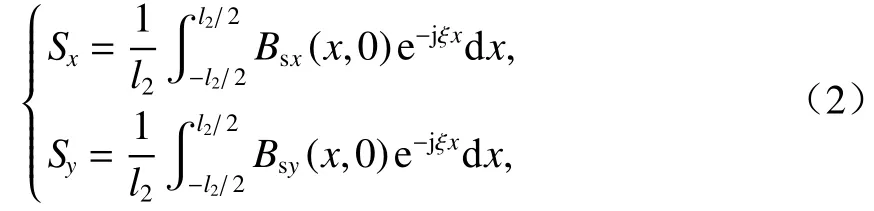
式中:Bsx(x,0)、Bsy(x,0)分别为永磁电磁混合 Halbach阵列在非磁性导体板上表面产生的x、y分量源磁场,由混合阵列永磁体及表面线圈在外部空间产生的磁场进行叠加所得,具体解析表达式可参考文献[13-14].
当车载混合Halbach阵列以相对速度v运动切割非磁性导体板时,在导体板中感生涡流大小[15]为

式中:γ2为非磁性导体板电导率.
利用麦克斯韦方程组及洛伦兹规范,可推导出系统矢量磁位A的方程[16]为

式中:μ0为真空磁导率;Js为感生涡流矢量; ∇2为拉普拉斯算子;ki为传播函数[16],且满足式(5)条件.
式中:ω为角频率(ω=-ξv);γi为气隙电导率(i=1,3);ε0为真空介电常数.
由于二维解析模型中,矢量磁位A和Js仅含有z方向分量.因此,根据式(4),可得到各区域矢量磁位标量为

式中:Aiz为各区域矢量磁位z方向分量.
利用分离变量法求得式(6)的通解后,根据文献[14-15]所得磁场边界条件求得各区域矢量磁位.然后由B=▽ ×A可得各区域感生磁场为(i= 1, 2, 3)
将源磁场与感生磁场求和,可得空间各区域磁场为(i= 1, 2, 3)
根据麦克斯韦张量法,可求得悬浮力[17-19]为
1.2 有限元数值计算
本文采用Ansys Maxwell有限元软件搭建数值计算模型,对推导的永磁电磁混合Halbach阵列电动悬浮系统悬浮力2D解析表达式进行验证,系统参数如表1所示.得到的有限元模型如图2所示.
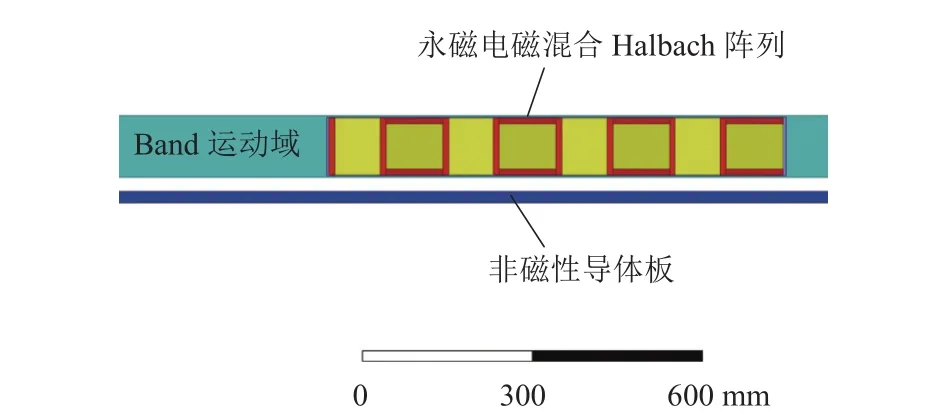
图2 2D有限元模型Fig.2 2D FEM
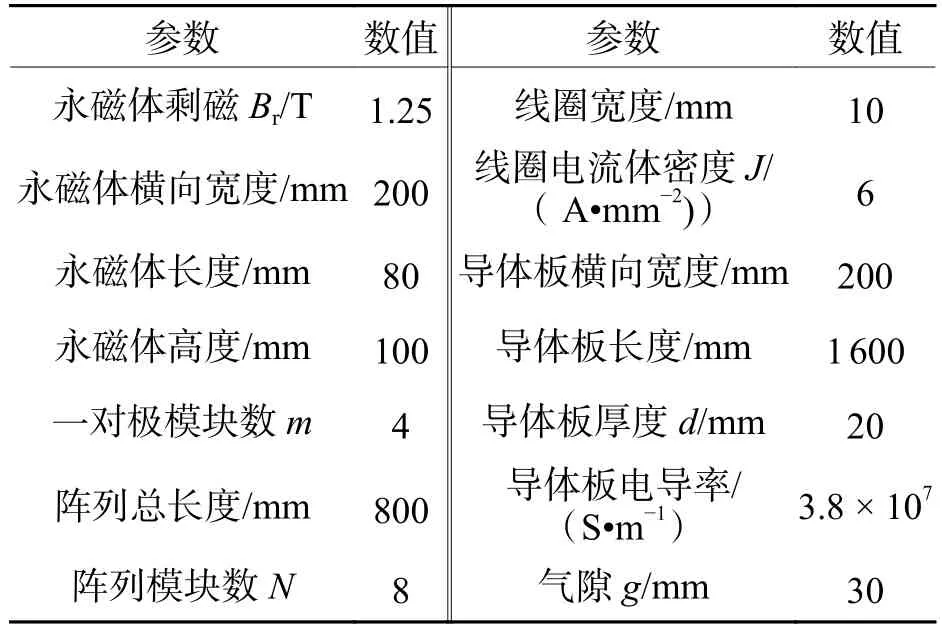
表1 模型参数Tab.1 Model parameters
不同运行速度下,悬浮力解析计算与有限元数值计算结果对比如图3所示.从图中可以看出,悬浮力解析解与有限元数值解吻合良好,验证了悬浮力解析表达式的准确性.
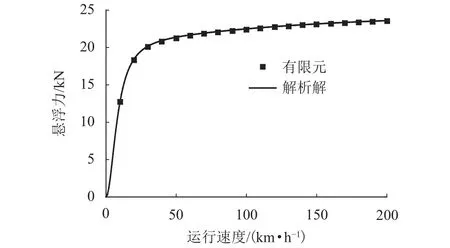
图3 悬浮力随运行速度的变化曲线Fig.3 Variation curve of suspension force with running speed
2 悬浮控制器的设计
2.1 数学模型的建立
当永磁电磁混合Halbach阵列电动悬浮系统稳定运行于平衡点(初始额定电流J0=0,初始额定气隙g0=30 mm,其他参数见表1)时,悬浮力等于车体重量,即

式中:F0为平衡点处悬浮力;G为车体重量.
当系统受到外界扰动力作用时,以垂直向上为参考正方向,可得系统垂向动力学方程为

式中:Fd为外界扰动力.
由于式(11)为气隙和电流的非线性方程,故需对式(11)在平衡点(g0,J0)处进行线性化处理.
对式(9)悬浮力在平衡点处泰勒级数展开,忽略高阶项,得

式中:Δg为气隙变化量;ΔJ为电流变化量;kg、kJ如式(13).
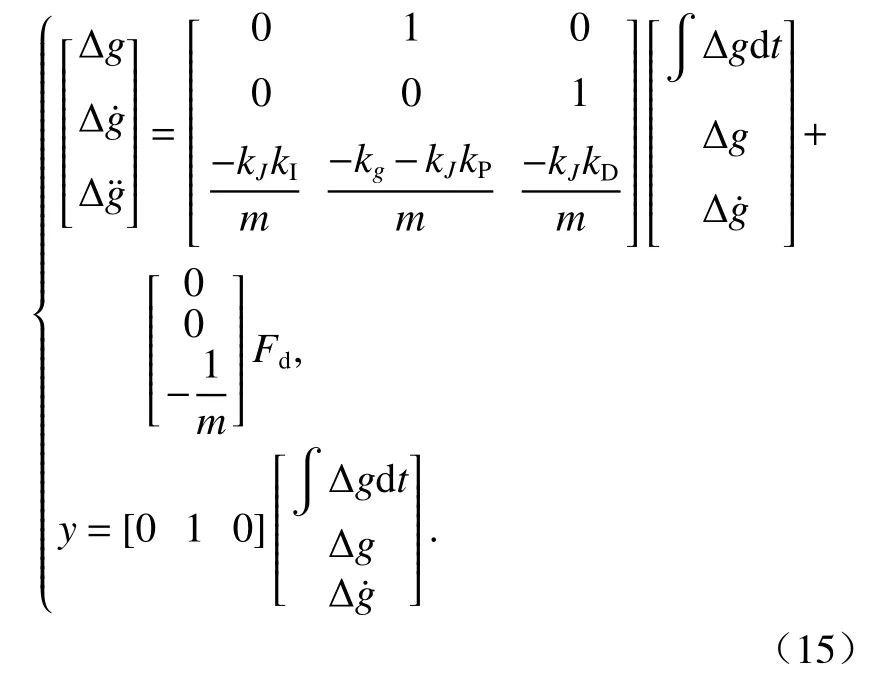
将式(10)和式(12)代入式(11),且结合 Δg=gg0,可得到系统近似线性化数学模型[20-22],如式(14).

式中:kg、kJ及车体质量m可根据J0=0,g0=30 mm及表1参数求得.
2.2 定气隙PID控制器
气隙反馈悬浮控制器的反馈输入量仅为悬浮气隙,可通过气隙传感器实时监测得到.设ΔJ=其中:kP、kI、kD分别为比例、积分、微分控制参数.结合式(14),选择状态变量为可得系统闭环状态方程为
由系统闭环状态方程可得其特征方程为

利用极点配置法,规定超调量不超过0.05,调整时间不超过0.1 s,可以求得期望特征方程为[2,22]

对比式(16)和式(17),可以求得kP=1.587 5 ×1011,kI=6.086 8 × 1012,kD=2.174 × 109.
设计的定气隙PID控制仿真如图4所示.
图4 定气隙PID控制仿真框图Fig.4 Simulation block diagram of fixed air gap PID control
2.3 变气隙PID控制器
定气隙PID控制器可使系统在受到外界扰动时稳定运行于额定气隙位置,但同时电磁铁线圈需通入一定电流来抵消外界扰动.因此,该方法对于散热较困难的永磁电磁混合Halbach阵列电动悬浮系统存在局限性.对于悬浮气隙较大的电动悬浮系统,可考虑通过改变悬浮气隙大小来抵消外界扰动,使得稳态状态下的电流为0.因此,本文在定气隙PID控制器的基础上,设计了变气隙PID控制器.
设计的变气隙PID控制仿真如图5.根据外界扰动力的变化在仿真模型中加入一函数模块,用以计算出跟随外界扰动力变化的初始气隙变化量Δg0,用g0加上Δg0后作为新的额定气隙,将其输入PID函数模块重新计算出相应的PID控制参数.
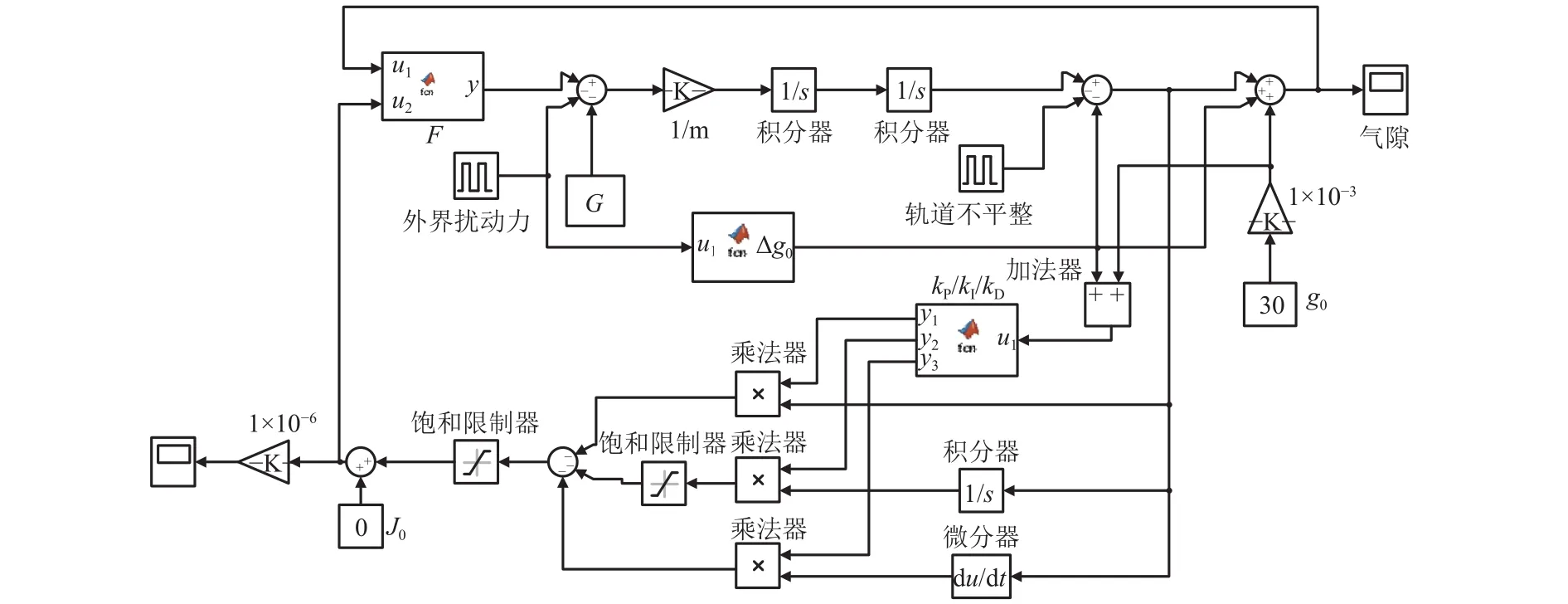
图5 变气隙PID控制仿真框图Fig.5 Simulation block diagram of variable air gap PID control
3 仿真分析
当系统运行速度为200 km/h时,对以下3种工况分别进行仿真分析:1)系统受到外界1 000 N扰动力干扰,作用时间为 0.3~0.7 s;2)系统受到外界 -1 000 N扰动力干扰,作用时间为0.3~0.7 s;3)系统受到轨道1 mm沉降干扰,作用时间为0.3~0.7 s.
3.1 定气隙PID控制
通过设计的定气隙PID控制器,得到系统悬浮气隙及线圈电流密度仿真波形如图6所示.由图可见:当系统受到 ±1 000 N外界扰动力作用时,系统能够迅速稳定运行于30 mm额定气隙,且稳定线圈电流分别为2.12 A/mm2和-2.17 A/mm2;当系统受到轨道1 mm沉降干扰时,系统也会迅速稳定于额定气隙30 mm处,且稳定线圈电流为0.
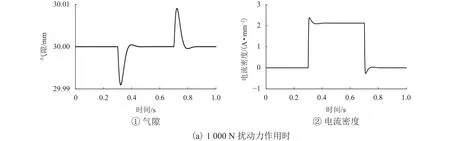
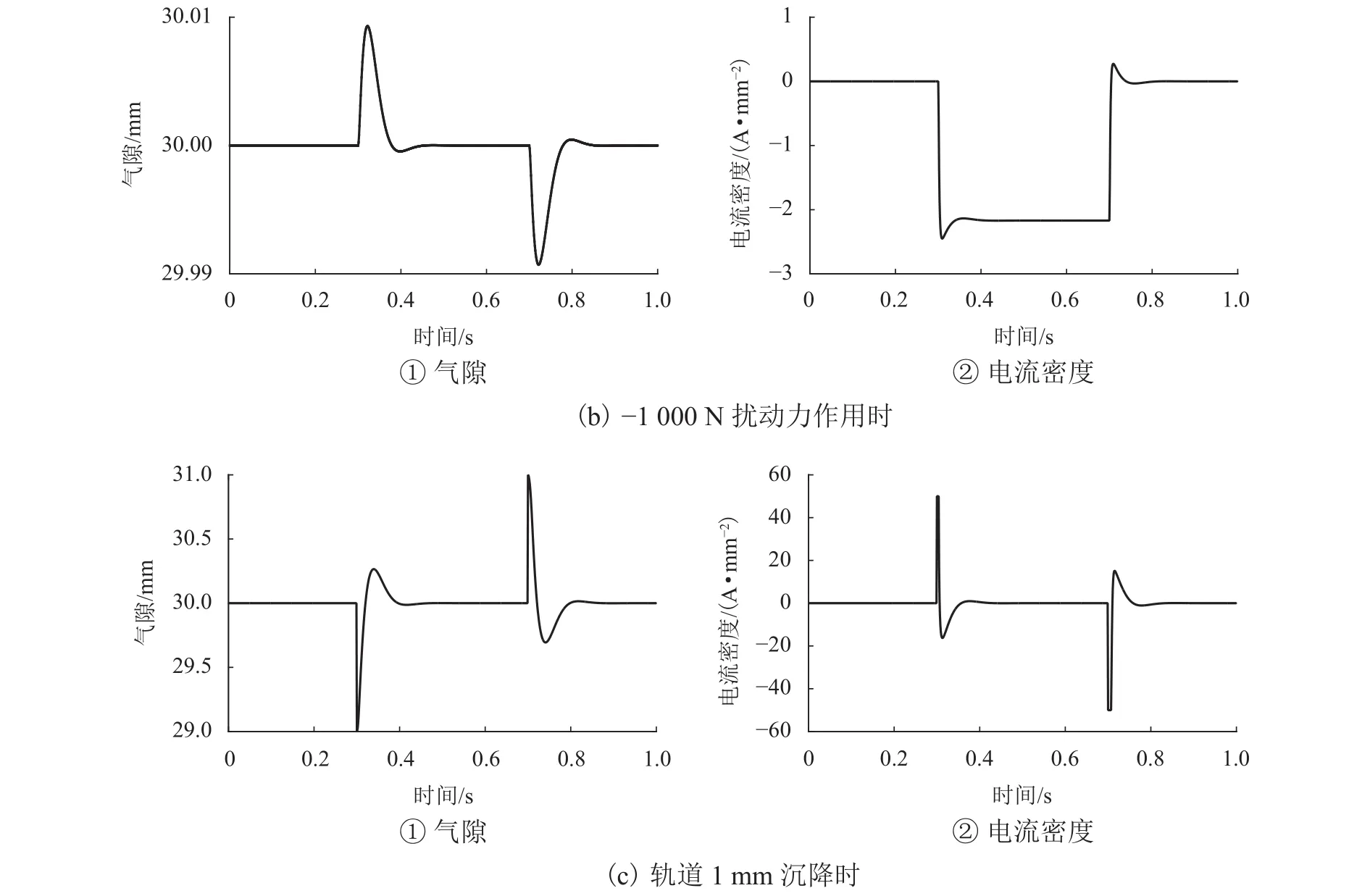
图6 悬浮气隙及线圈电流密度Fig.6 Suspension air gap and coil current density
3.2 变气隙控制
通过设计的变气隙PID控制器得到系统悬浮气隙及线圈电流密度仿真波形如图7所示.由图可见:在系统受到轨道1 mm沉降干扰时,系统响应与定气隙PID控制一致,能迅速稳定于额定气隙30 mm,且稳态线圈电流仍为0; 当系统受到±1 000 N外界扰动力作用时,稳态状态下,系统线圈电流为0,此时系统悬浮于28.5 mm及31.6 mm位置.相比于通过线圈电流来抵消外界扰动力的定气隙PID控制,变气隙PID控制则是通过改变悬浮气隙以产生能够与外界扰动力和车体重量平衡的悬浮力,大大减小了能耗与发热.尤其对于永磁电磁混合Halbach阵列电动悬浮系统,存在散热较困难的问题,变气隙PID控制显得更为适用.
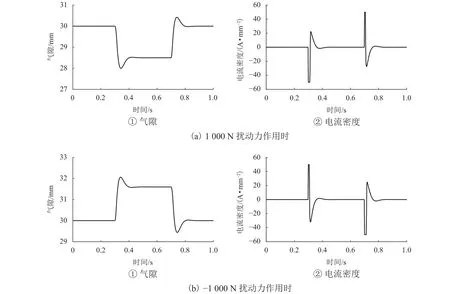
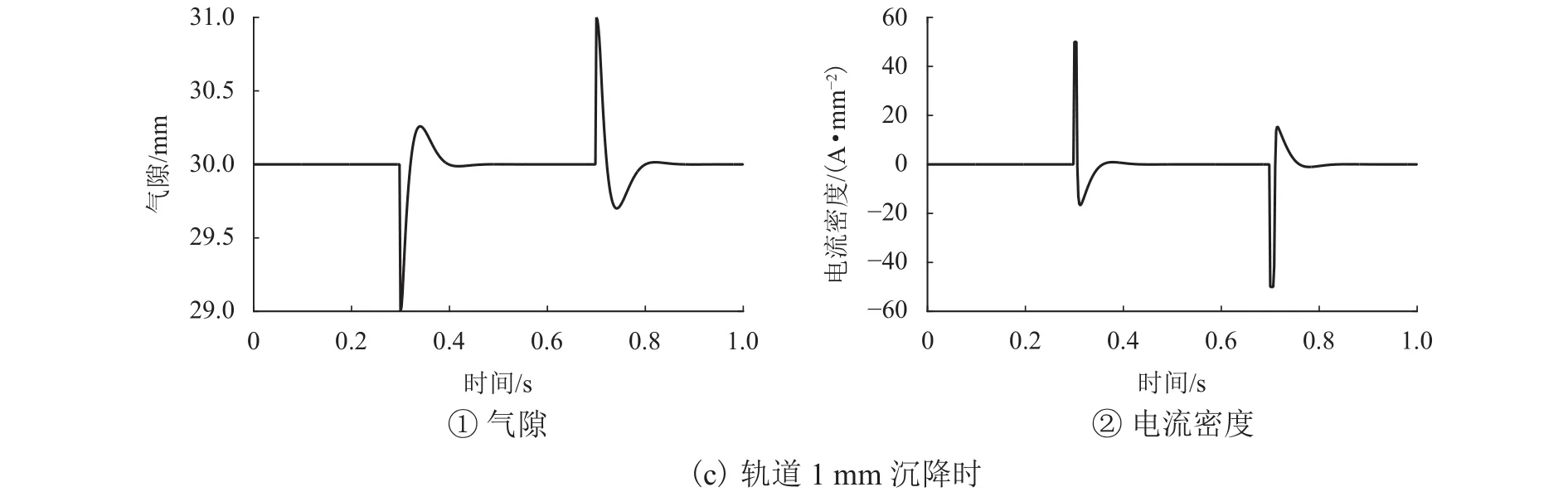
图7 悬浮气隙及线圈电流密度(变气隙)Fig.7 Suspension air gap and coil current density (variable air gap )
4 结 论
本文基于永磁电磁混合Halbach阵列电动悬浮2D悬浮力解析式,设计了两种PID悬浮控制器,并对其进行动态仿真,得到以下结论:
1) 通过设计的两种PID控制器,系统在受到外界扰动时,均能实现动态快速稳定,可解决永磁电动悬浮因欠阻尼特性导致悬浮稳定性差的问题.
2) 当系统在受到 ±1 000 N外界扰动力作用时,定气隙PID控制可使系统稳定于额定气隙30 mm位置,但线圈需分别通入2.12 A/mm2和 -2.17 A/mm2稳态电流以抵消外界扰动力的影响.而变气隙PID控制则使系统分别稳定悬浮于28.5 mm及31.6 mm位置,且稳态线圈电流为0.
3) 相比于定气隙PID控制,变气隙PID控制可有效降低线圈能耗和发热,更适用于发热较困难的永磁电磁混合Halbach阵列电动悬浮系统.