从旋回进距角度分析 “东方德班”轮碰撞事故
2022-06-22齐建伟
齐建伟


摘 要:集装箱船舶逐步大型化的发展速度之快在不断挑战全球范围内的许多码头、狭水道、航道等水域的上限,300 m以上的超大型集装箱船舶满足了IMO等相关组织的操纵性衡准要求,但是其不同装载情况下的操纵特性仍然处在不断摸索中,势必需要不断提高船舶操纵人员的随机应变能力和扎实的船舶操纵技术。本文以“东方德班”轮高雄港碰撞事故为例,对空船情况下的超大型集装船舶的受限水域内掉头和大角度转向做了一定思考和分析。
关键词:东方德班;空船;舵效;纵距;旋回
0 引 言
超大型集装箱船舶空船不同压载情况下航行,船舶的舵叶(转向系统)和螺旋桨(推进系统)中只有舵叶或者两者同时露出水面,导致船舶操纵要素发生极其恶劣的突变,如果船舶驾引人员不能够引起足够重视,仅仅依靠经验引航,往往会带来极其严重的后果。文中有些数据来自“东方德班”轮同型船舶“A船”。
1 “东方德班”轮高雄港碰撞事故概况
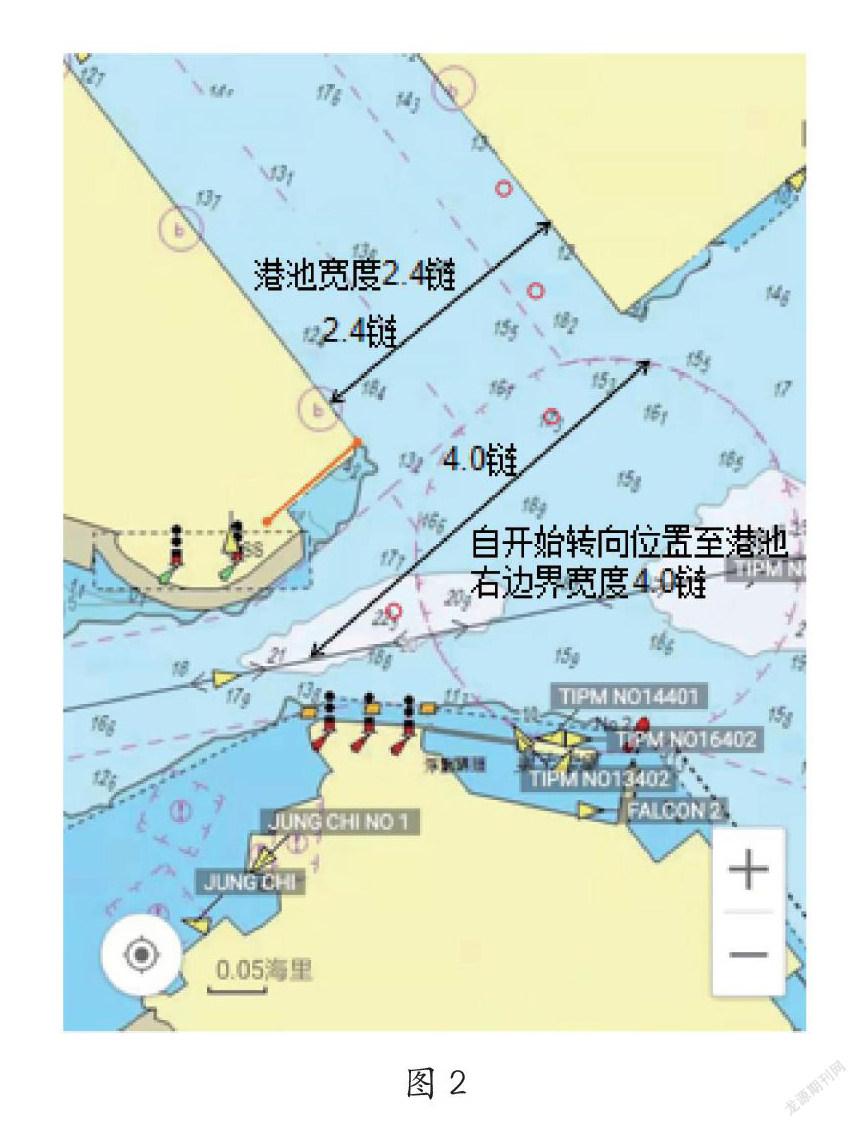
2021年6月3日,大型集装箱船舶“东方德班”轮驶入中国台湾高雄港池向左大角度转向过程中,碰撞码头集装箱专用桥吊,致使一台桥吊完全倒塌,另一台严重受损,并且擦碰了码头上靠泊船的船艏部。“东方德班”轮船长316 m,宽46 m,事故发生时的吃水8.8 m,进港时空载,南风3级。
11:20,正横过高雄港VTS塔台,余速为6.3 kn左右。
11:23,航速5.6 kn,船舶已经向左转向,驶往高雄阳明集装箱码头。
11:31,正横接近码头前沿不到两倍船宽,船位明显距码头前沿过近,VTS发现船位偏移,用高频多次呼叫警告,船舶无应答。
11:38,船舶驾驶台碰撞68号泊位作业的8号集装箱桥吊的吊臂前端,使其坍塌,船舶巨大的惯性继续前冲撞击波及第二座6号桥吊,并挤压靠泊船船艏左舷。
事故发生状况如图1、图2所示。
2 “东方德班”轮碰撞事故的操纵要素分析
2.1 “东方德班”轮事故发生时的引航员概况
通过有关信息资料了解到事故发生时的船舶引航员是一位曾经效力于中国台湾阳明集装箱公司的船长,后来又在高雄港从事引航员工作多年,因此对于集装箱船舶操纵有其先天优势,对于水域环境又极其了解。
2.2 “东方德班”轮向左转向前的速度控制
据“东方德班”轮同型船舶“A船”资料得知,此种船型的主机最小转速(minimum rpm)为30 rpm,对应的船速为7.5 kn,如图1所示“东方德班”轮向左大角度转向前只有6 kn左右速度,因此引航员已经采取了减速措施,但是事故依然发生了。
2.3 “东方德班”轮事故引发的操纵要素分析
如图3所示,为了分析出此次事故发生时操纵要素方面上的主要原因,经过抽丝剥茧,这样更加容易分析出事故发生时操纵要素方面的主要原因,此次事故可以簡要看成是“东方德班”轮向左做旋回运动时纵向上的船舶旋回进距(纵距)超出水域限制而导致的船舶碰撞事故。
3 船舶舵效和船舶旋回纵距的关系
3.1 舵效的定义和意义
船舶的浮态对舵效的影响极大,船舶吃水、横倾、纵倾状态时对舵效影响各不相同。舵效是指:“船舶在各种不同状态下,用舵设备操纵船舶所表现的综合效果。”衡量舵效好坏的舵效指数:ω=K/T*δ
其中,ω:舵效指数;K:船舶旋回指数;T:船舶追随性指数;δ:舵角。
舵效指数越大船舶的舵效越好,从舵效指数中可以知道在一定舵角时舵效考察的是船舶的旋回性和追随性两个方面。
3.2 狭义舵效与船舶旋回纵距的关系
“舵效”根据具体航海环境的不同,航海人所关注的意义也不尽相同。为了解释本次碰撞事件,只考量舵效指数ω和船舶旋回指数K之间的关系,称为“狭义舵效”,“狭义舵效”越好,旋回圈越小,K值越大。本文所考虑的舵效的含义是大舵角(满舵)的旋回进距(纵距)的大小。
4 “东方德班”轮旋回进距较正常状态下增加超出水域限制是事故主因
4.1 “东方德班”轮旋回纵距增加的主要原因
4.1.1 实际舵面积比的突变
(1) 舵面积比的定义和意义
舵面积比是指船舶在正舵状态下的舵叶侧面积在中纵剖面上投影的面积与设计水线下船舶侧面积在中纵剖面上投影的面积的比值。对于特定船舶“东方德班”轮的舵面积比是固定不变的。相同船型,不考虑其他因素,对于排水量相同的船舶舵面积比越大,则单单从旋回进距来考虑的狭义舵效越好。
(2) 实际舵面积比及其意义
由于船舶吃水的不同会导致船舶实际舵面积比产生变化,称为实际舵面积比。随着平均吃水的降低,水线下船舶侧面积在中纵剖面上投影的面积是在不断减小的,水线下舵叶侧面积在中纵剖面上投影的面积却不变,因此在舵叶露出水面之前,舵面积比是增加的,狭义舵效是不断增强的。
(3)实际舵面积比的反转和突变
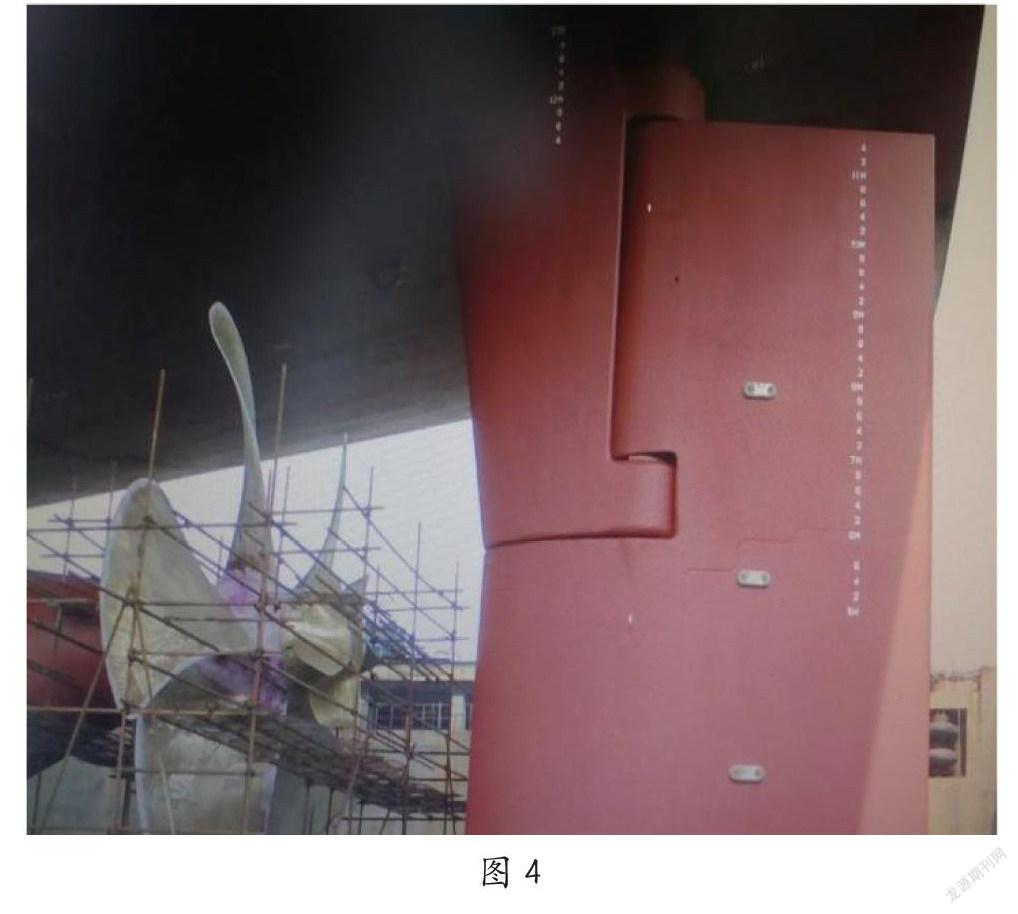
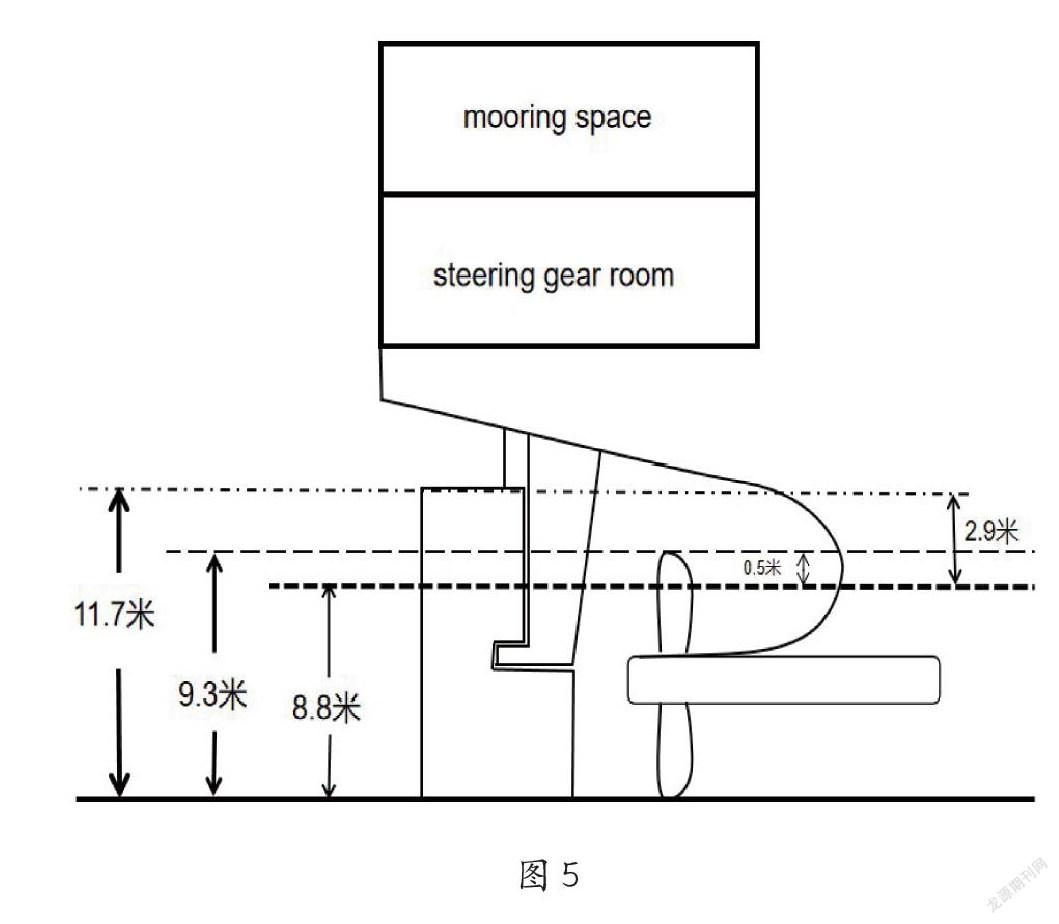
随着平均吃水的降低,从舵叶露出水面开始动态舵面积比却发生了突变。从舵叶露出水面开始,随着吃水的继续降低,则水线下船舶侧面积下降幅度远不及水线下舵叶侧面积下降幅度,导致动态舵面积比发生反转而剧降,从而舵效也发生反转而剧降。如图4和图5所示,“东方德班”轮事故发生时尾吃水约8.80 m,舵叶露出水面约2.90 m。此种条件下“东方德班”轮的舵效是会出现剧烈降低的,导致其旋回进距陡增。
4.1.2 舵压力的突变
进港航道内或港池内航行船速下降,舵速下降,势必导致舵压力相较于船舶中高速行驶时变小,这是船舶驾引人员正常认知范围内的。但是由于船舶吃水的继续降低自螺旋桨露出水面开始螺旋桨的推力发生突变剧降,势必作用在舵叶上的舵压力剧降。如图4和图5所示,“东方德班”轮事故发生时螺旋桨露出水面约0.5 m,螺旋桨相同转速下的舵压力突变导致舵效陡然减弱,从而导致“东方德班”轮旋回进距也随之陡然增加。
4.2 “东方德班”轮旋回进距增加的次要原因
4.2.1 空气吸入现象
舵的上缘高于水面且舵速较大时极易发生舵的背面吸入空气、产生涡流的现象,此现象使舵力下降,舵效降低,旋回进距增加。
4.2.2 风流影响
“东方德班”轮事故发生时南风右舷侧风力3级,向左侧转向舵效变差。如图2所示岸壁岬角处水域容易形成剪刀流,极易导致船舶舵效降低。
4.2.3 浅水效应
航道和港池内水深变浅,惯性类流体动力和黏性类流体动力均增大,船舶旋回阻尼力矩增加,舵效变差,旋回进距增加。
4.2.4 吃水差的影响
空船载况尾倾增大,旋回初径增加,旋回进距也将随之增加。对于Cb=0.8的船舶,若尾倾增大量为船长的1%,旋回初径将可增加10%左右;对于Cb=0.6的船舶,若尾倾增大量为船长的1%,旋回初径将可增加3%左右。通过与“东方德班”相同船型的“A船”资料所知,此种船型的Cb约为0.67,近似得知“东方德班”轮尾倾增大量为3.16 m,则旋回初径可增加3%~10%。
5 超大型集装箱船在受限水域的掉头或大角度转向方法探讨
5.1 电子海图的船位预测与加速旋回两者相结合的航法
船舶数据化、智能化和高速传输等相关技术的发展进步使船舶用电子海图的功能不断优化,其中的预测船位功能(ship position prediction)非常适用于大角度转向或者旋回中对于可用水域范围的预估。
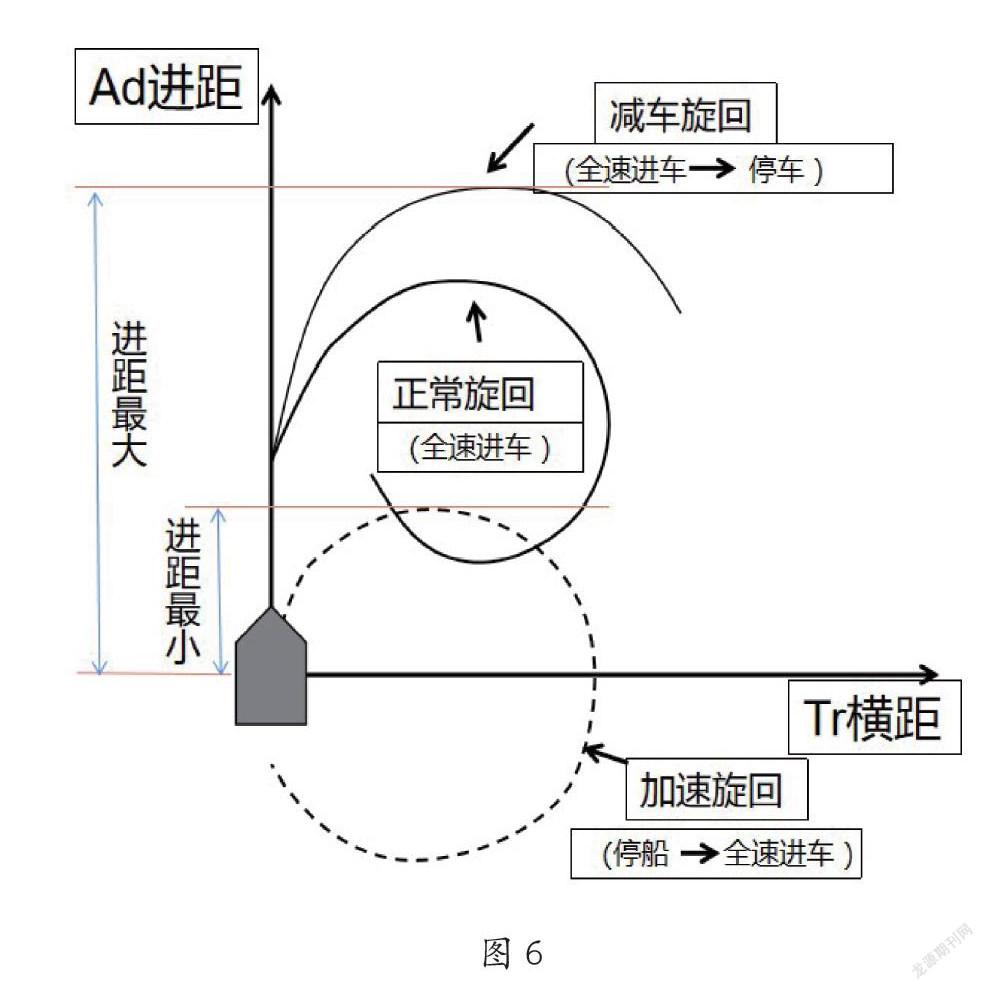
如图6所示的加速旋回能够最大限度地减小旋回进距,受限水域中超大型集装箱船舶在掉头或大角度转向前先减速(可外力减速),减小冲程,储备舵力,以便在后续加车提高舵速,增加滑失比,提高舵效,减小船舶旋回进距,缩小掉头或者大角度转向所需水域。
两者相结合,及时地根据船位预测功能调整舵角和主机转速来增加或者减小舵效,调整船舶进距,使船舶保持安全航速情况下完成受限水域的掉头和大角度转向。
5.2 大船停在安全水域后通过外力协助掉头或者大角度转向
在掉头区或者宽敞水域通过自身倒车或者拖船倒车将大船拉停,之后通过自身侧推器和拖船顶推或拖拉将大船调整到新航向后加车继续航行。“东方德班”轮完全可以在如图3所示的红色虚线警戒区内拉停,通过外力协助完成转向动作后继续加车进港。
6 结 语
超大型集装箱船舶随着平均吃水的减小,舵叶上缘露出水面迎来第一次“狭义舵效“的突变,螺旋桨上缘露出水面是第二次“狭义舵效”的突变,这两次突变都造成船舶旋回进距的陡然增加,再叠加其他因素影响,导致超大型集装箱船舶在受限水域的操纵危险性极高。集装箱班轮船舶的大型化速度和大規模化速度发展远超当今许多国家的港口、航道等的配套设施更新发展速度,使此类船舶在受限水域的航行运动受到极大约束,经验引航与数据引航相结合,技术引航以安全引航为依托,面对新挑战我们仍需不断探索新技术、摸索新方法。
参考文献
[1] 洪碧光, 船舶操纵原理与技术[M].大连海事大学出版社 2007.05.
[2] 房希旺,何欣等.船舶操纵[M].大连海事大学出版社 2012.09.
