基于MI地磁传感器的低成本惯性组合导航装置设计
2022-06-21彭宏伟梁列全温梓呈童桂超
彭宏伟,梁列全,温梓呈,周 璇,童桂超
(1.上海创感传感技术有限公司,上海 200125;2.广东财经大学 信息学院,广东 广州 510320;3.华南理工大学 机械与汽车工程学院,广东 广州 510641)
0 引 言
组合导航是提高导航系统整体性能的有效技术手段。INS/GPS组合导航是当前最常见的组合导航技术,由GPS导航系统和惯性导航系统(Inertial Navigation System, INS)集成,它将两种导航技术进行优势互补,在民用和军用领域得到广泛应用。
INS/GPS组合导航精度的提高近年来引起了诸多研究人员的广泛关注。然而,GPS短期失效环境下,低成本的惯性导航器件测量误差会迅速累积,导致导航精度迅速下降。改进滤波算法能够在一定程度上改进导航精度,但时间复杂度较高,且难以保证GPS失效时的导航精度,常用算法包括粒子滤波算法、自适应滤波算法、人工智能算法、人工神经网络算法、模糊逻辑算法等。另一种方法为通过选择易于集成的传感器为系统提供辅助导航信息,以改善GPS卫星信号断续情况下的定位精度,提高系统稳定性。例如,Du S等采用里程计数据改善组合导航精度;黄剑雄等人对视觉/惯导无人机组合导航算法展开研究,提出了自适应渐消卡尔曼滤波算法以降低视觉位姿信息滞后带来的影响;徐士厚等利用电子罗盘和里程仪的输出对INS/GPS数据进行修正;郭美玲等使用轮速传感器、加速度计、横摆角传感器、方向盘传感器和惯性传感器构成组合导航系统;蒋长辉等引入雷达和气压计的速度数据和高度数据修正INS/GPS的累积误差,这些方法均在不同程度上提高了系统的定位精度。
地磁是地球的固有属性,地磁信息分布广泛,获取方便,同时,地磁信息是具有大小和方向的向量,可以视为导航信息的可靠来源。现有的地磁检测传感器分别基于3种不同的电磁效应,即磁感式(Magneto-Inductive)传感器、霍尔传感器和磁阻式(Magneto-Resistive)传感器。霍尔地磁传感器和MR地磁传感器均存在精度不足、功耗较高、温度特性不稳定等问题。而搭载MI元件的传感器在精度、温度特性、磁滞性能等方面比另外两种传感器表现更优秀。磁感式地磁传感器具有霍尔地磁传感器1万倍以上的灵敏度。为此,本文选择MI地磁传感器RM3100作为地磁检测传感器。
MI/GPS/INS组合导航装置在多种传感器数据采集过程中可能会引入各种干扰噪声,直接影响导航系统的测量精度。为此,本文提出了MI/GPS/INS组合导航方法,以提高GPS间歇性失效时的导航定位精度。
1 MI/GPS/INS组合导航装置硬件设计
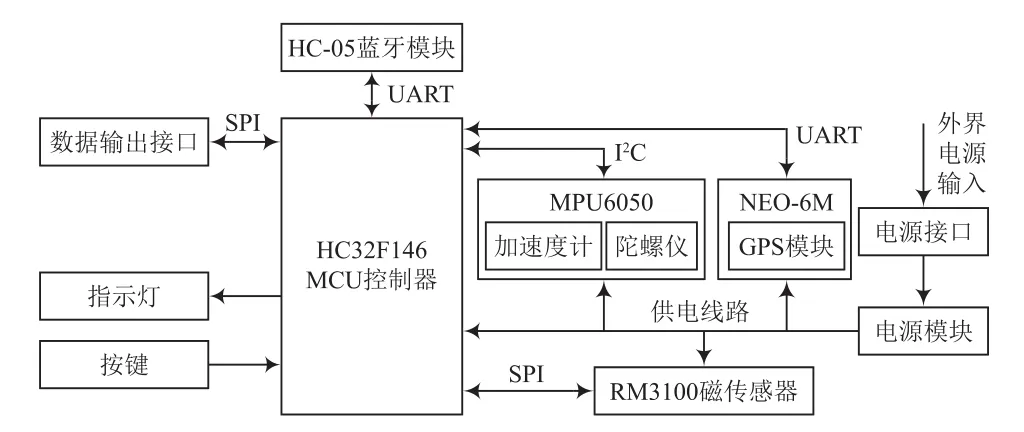
图1 硬件结构框架
2 组合导航方法
MI/GPS/INS组合导航方法指利用MI传感器修正惯性导航装置的积分误差,以提高GPS失效时的导航精度。组合导航方法流程如图2所示,分为数据采集、数据滤波、数据校正、四元数解算、数据融合等步骤,最终可输出的参数包括姿态欧拉角与轨迹坐标两部分。
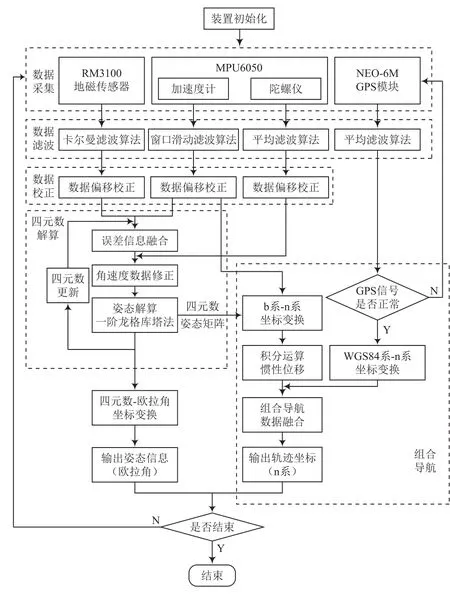
图2 组合导航方法流程
2.1 数据采集
本装置采集的数据包括GPS数据、加速度计数据、陀螺仪数据和地磁数据。GPS数据采集频率与惯性导航、地磁数据的采集频率难以同步,GPS采集频率较低。当GPS采集间隔或失效时,地磁数据作为惯性导航数据的辅助数据,输出惯性导航数据,当新的GPS数据采集完成时,融合惯性导航数据和GPS数据输出轨迹坐标。
2.2 数据滤波
环境温度变化和装置运动对加速度计的干扰较大,经对比实验发现,滑动窗口平均滤波算法与卡尔曼滤波算法相比,加速度计数据的滤波效果相差不大,选用计算量较小的滑动窗口平均滤波算法改善加速度计和陀螺仪采集的数据。
地磁传感器误差主要来自地磁场的随机干扰,且磁场方向和大小不确定,一阶卡尔曼滤波算法对高频和随机干扰噪声的滤波效果较好,且响应速度较快。因此,地磁传感器数据采用卡尔曼滤波算法降低干扰。
2.3 数据校正
加速度计在静置状态时存在重力加速度;地磁传感器对工作环境的硬磁干扰十分敏感,且地磁传感器、惯性测量模块(加速度计和陀螺仪)的安装位置存在一定距离,地磁传感器的三轴坐标系与惯性测量单元坐标系的零点不在同一点上,因此,需要对地磁传感器、加速度计以及陀螺仪进行零点偏移校正,校正数值通过初始标定试验得到。
(1)加速度计初始标定方法
1.3 标准溶液的配制 根据需求,分别吸取适量的各腹泻性贝类毒素标准溶液于5 mL棕色容量瓶中,用50%甲醇水溶液稀释并定容,配制成标准储备液。用空白基质液稀释储备液配制成各个不同浓度的标准工作液。各类标准溶液避光保存于-12 ℃。
加速度计用于测量载体的加速度。理论上,三轴加速度计采集的数据在空间上组成圆球,而圆球的球心为坐标轴的零点,球半径为重力加速度的数值9.8 m/s。加速度计零点漂移通过基于六位取样法的单轴零点校正算法进行校准。校正所用算法如式(1)所示:
式中:,,为灵敏度;,,为测量值;,,为偏移量。
(2)陀螺仪初始标定方法
静止条件下,陀螺仪理论上三轴输出均为0,实际测量会有偏移,通过平均偏移参数校正法进行校正。
(3)地磁传感器初始标定方法
根据地磁传感器原理,理论上磁场数据同样在空间上构成球心在零点、球半径为的球。但实际上,存在软硬磁干扰以及传感器加工误差,得出的磁场数据组成椭球,因此通过校正椭球成为球形,就能完成地磁传感器的零点校正。地磁传感器的初始标定方法采用空间八字环绕法获取,采用各轴数据最大、最小值的平均校正三轴数据。地磁传感器校正前后对比如图3所示。
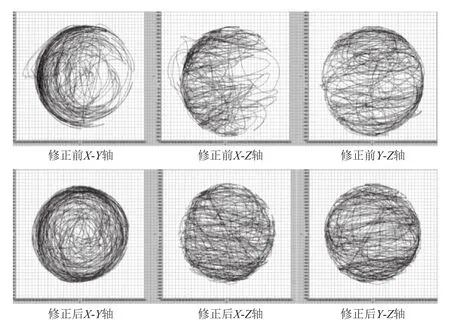
图3 地磁传感器数据修正前后对比图
2.4 四元数解算
2.4.1 四元数法
载体的姿态解算是实现惯性导航的核心技术之一,通过姿态解算可以通过得到的载体姿态和导航参数计算所需参数。
目前常用的坐标系包括载体坐标系(b系)、WGS84坐标系(GPS坐标)和东北天坐标系(n系)。载体坐标系主要反映载体方向;惯性导航传感器数据一般是基于载体的坐标系。不同坐标系之间的数据必须转换到统一坐标系下才能融合。
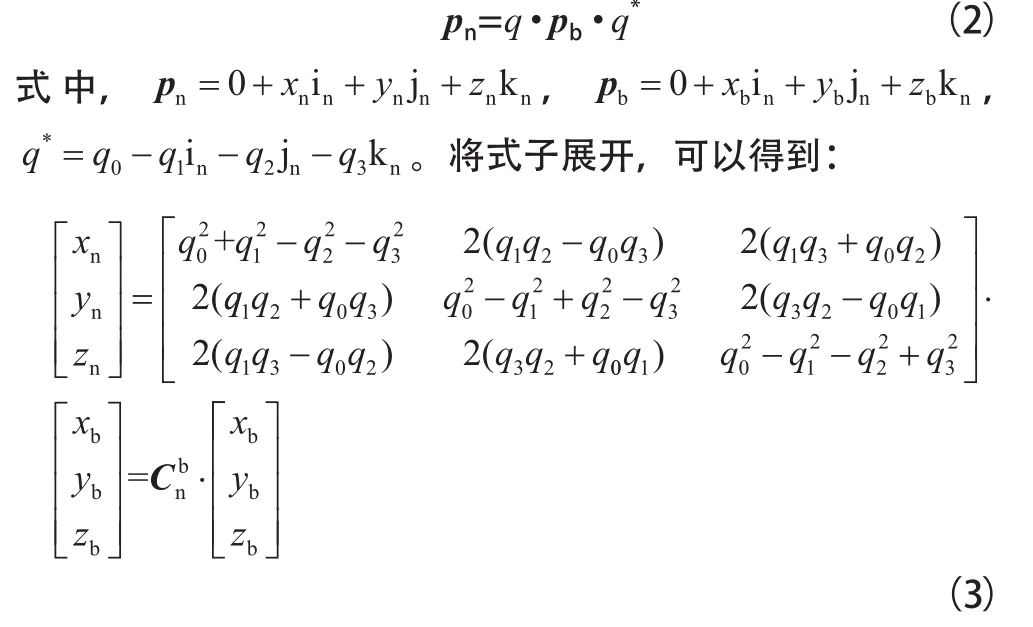
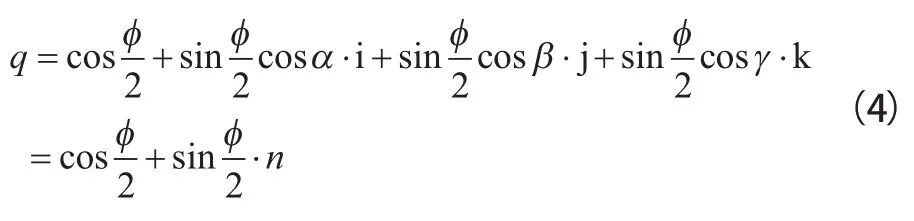
描述载体坐标相对地理坐标系方位关系的常用表示方法主要有3种,分别是欧拉角法、方向余弦法以及四元数法。欧拉角法又称为三参数法,该方法由于不能用于全姿态飞行运载体而难以广泛用于工程实践,且实时计算困难。方向余弦法又称为九参数法,该方法避免了“奇点”现象的出现,但方程计算量大,效率较低。四元数法又称为四参数法,其由1个实数和3个复数组成,数学形式可以写成=+i+j+k,其中 i=j=k=-1,,,,为实数。对于任意在载体坐标系下的三维向量,可以通过四元数法将其转换为地理坐标系下的三维向量,如式(2)所示:

2.4.2 四元数解算
将上述方程写成矩阵的形式:
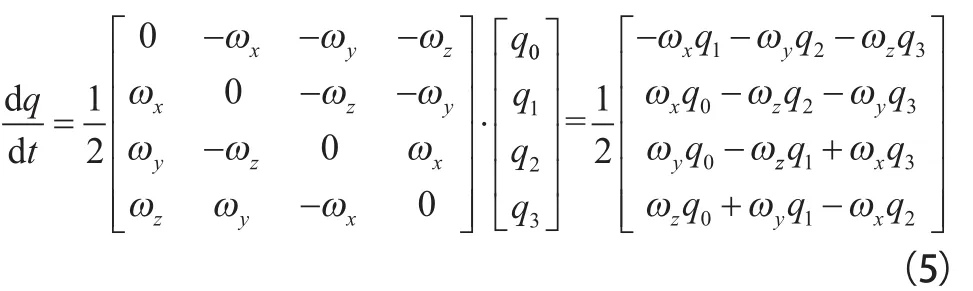
四元数更新:
求出每个时刻的角速度ω,ω,ω就可以更新四元数。
2.4.3 加速度计与地磁传感器误差计算
陀螺仪可以测量三轴角速度,但陀螺仪依赖积分,而且存在漂移,所以不能只用陀螺仪测量的数据作为四元数更新的依据。本装置通过加速度计以及地磁传感器的数据融合校正陀螺仪的角速度,实现精确的姿态表示。加速度计和地磁传感器的误差计算包括数据归一化、坐标变换以及误差计算。加速度计利用地球重力加速度来修正误差。载体仅受重力时,重力加速度为g,而对于加速度计所测量的三轴加速度,通过坐标变换可以获得合加速度,但由于加速度计的测量误差,导致测量值与实际值存在偏差,因此通过四元数姿态值估算加速度分量。地磁传感器的误差校正方法原理:地磁线方向从地理南极指向地理北极,地理坐标系下地磁矢量可以分解至轴和轴,轴方向(东西方向)分量为0。从地磁传感器获得的磁场数据通过坐标变换换算为地理坐标系下的磁场矢量,这两组数据代表相同磁场,但由于测量误差,这两个磁场值不能完全重合,因此利用向量积描述该误差,并且通过反馈误差不断减小该误差,使得传感器数据不断逼近实际值,实现补偿矫正。
2.4.4 误差数据融合与角速度数据修正
加速度计数据在载体坐标系下测得,地磁传感器数据在地理坐标系下测得,上述2个误差向量的叉乘可以求出向量之间的夹角,即欧拉角。然后利用加速度计和地磁传感器测量误差的叉乘值修正四元数解算的陀螺仪角速度。
2.5 组合导航
载体轨迹通过计算每个采样时间点的坐标位置,经连接后形成轨迹。坐标位置数据来源于两方面,一是加速度测量得到的地理坐标系下的加速度,根据牛顿第二定律,通过积分可以得到位移,但由于加速度计自身的精度问题,使得载体自带加速度,在两次积分的作用下,随着时间的推移,位移误差累积导致加速度输出不可靠,故论文采用四元数姿态矩阵在线更新、修正加速度累积误差;二是GPS的卫星定位信息,可以提供绝对位置信息,但GPS相对刷新速度较慢,且当GPS间歇性失效时,缺乏定位信息。因此,根据不同情况对两组数据进行融合,提高定位精度。
惯性导航坐标位置更新步骤:加速度各轴分量的坐标变换、加速度积分、速度积分、惯性导航数据更新;GPS坐标更新步骤:GPS数据采集、坐标系变换、GPS数据更新。
当GPS采样时间到后,判断GPS导航信息是否正常,若GPS导航信息不正常,则输出惯性导航轨迹;若GPS导航信息正常,则采用二阶互补滤波对GPS位移数据和惯性位移数据进行加权融合,并通过两组位移的差值作为反馈,调整位移大小,最终输出组合导航轨迹。
3 实验与结果分析
论文设计了室内和室外两种导航实验,室外导航实验和室内导航实验分别用于验证GPS信号正常和失效时,论文提出的组合导航方法的导航精度是否优于惯性组合导航的精度。
3.1 室外导航实验
室外导航实验进行了2组,分别选择某大学内部教学楼外某路径的2个方向进行,每组实验分为2次,一次仅采用GPS导航,另一次采用论文的组合导航装置。第一次实验的路径长度为200 m,实验沿路径的西边缘向南行走,轨迹如图4(a)所示;第二次行走实验的路径长为150 m,实验沿路径的北边缘向东行走,轨迹如图4(b)所示。红色线为仅采用GPS导航的行走轨迹,蓝色线为组合导航轨迹。
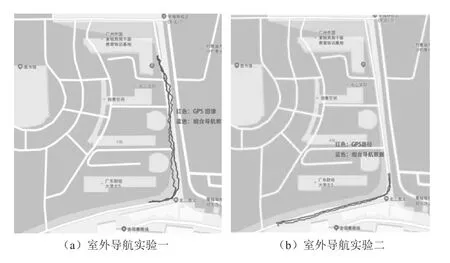
图4 室外导航实验轨迹对比图
从图4可以看出,论文研制的组合导航方法的导航轨迹比GPS导航更平滑,更接近实际的行走轨迹。因此,当GPS导航有效时,论文研制的组合导航装置导航精度高于单一的GPS导航。
3.2 室内导航实验
室内导航实验主要验证GPS失效情况下的导航效果,分别选择教学楼室内走廊150 m和半室内走廊200 m进行实验。实验1在室内走廊进行,室内为全封闭环境,GPS信号微弱,室内走廊边线用黑色线标出,红色代表实验时真实行走轨迹,蓝色代表组合导航装置的输出轨迹。室内走廊宽度2.35 m,实验时步行速度大约为1.2 m/s,实验时间约为125 s。行走先向南,而后转向西,如图5中蓝色箭头所示。实验2的室外走廊是一条连接不同教学楼的连廊,属于半室外环境,GPS信号时断时续。

图5 室内组合导航轨迹与真实行走轨迹对比图
从图5可以看出,无论是GPS完全失效环境还是部分失效环境,组合导航的蓝色输出轨迹都能准确跟踪真实的红色行走轨迹,验证了论文研制的组合导航装置的有效性。
4 结 语
本文设计的磁感式地磁辅助组合导航方法包括数据滤波、数据标定、四元数解算以及数据融合算法等,与其他类型地磁辅助导航方式相比,本方法无需地磁图先验信息,且原理简单、计算量小,有效解决了系统的零点漂移、环境干扰和误差累积等问题。实验结果表明,该方法有效融合了多传感器信息,无需地磁图先验信息,在GPS短期失效或断续连接时的导航精确度较高,有效抑制了常规惯性导航误差。
