倒立摆的线性系统理论课程案例探索
2022-06-21孙军伟,王延峰
孙军伟,王延峰
摘 要: 在线性系统理论课程教学中,结合控制类研究生专业基础性课程建设的要求,将倒立摆案例教学引入到整个线性系统理论教学体系中。给出线性系统理论的建设原则,总结倒立摆课程案例的建设优势,制定多级倒立摆课程案例的建设内容。倒立摆教学案例的引入,有望引导学生积极参与分析、设计和讨论,提高学生运用所学线性系统理论知识解决控制工程应用问题的能力。
关键词: 线性系统理论; 倒立摆; 课程案例; 控制工程
中图分类号:G643.2 文献标识码:A 文章编号:1006-8228(2022)06-108-04
Case exploration of linear system theory course of inverted pendulum
Sun Junwei, Wang Yanfeng
(College of Electrical Information Engineering, Zhengzhou University of Light Industry, Zhengzhou, Henan 450002, China)
Abstract: In the teaching of linear system theory, combined with the requirements of basic course construction for graduate students in control, the case teaching of inverted pendulum is introduced into the entire linear system theory teaching system. It gives the design principle of linear system theory, summarizes the advantages of inverted pendulum course case construction, and designs the content frame of multi-level inverted pendulum course case construction. The introduction of inverted pendulum teaching cases is expected to guide students to actively participate in analysis, design and discussion, and improve students' ability to solve control engineering applications by using the theoretical knowledge of linear systems.
Key words: linear system theory; inverted pendulum; course cases; control engineering
0 引言
《教育部關于做好全日制硕士专业学位研究生培养工作的若干意见》(教研[2009]1号)中,着重突出了招收硕士研究生必须具备“较强解决实际问题的能力”。《教育部关于加强专业学位研究生案例教学和联合培养基地建设的意见》(教研[2015]1号)中,也着重说明了在硕士研究生培养阶段,教学案例分析有举足轻重的地位。《教育部关于专业学位研究生教育发展方案(2020-2025)》(学位[2020]20号)中,强调建设创新型国家的一条重要途径就是发展专业学位研究生教育[1]。
怎样才能不断地提高专业学位研究生的创新能力,是对培养团队的最大考验。探索与其他学术型专业硕士学位研究生不同的人才培养教学模式,更有效的适应和解决教育工程工作难题,是一个非常值得深入研究的重点课题。
在现代的控制理论中,线性系统理论是基础,其具有联系基础理论和应用理论之间的纽带作用[2]。该课程教学内容丰富、涉及领域的知识范围宽、对理论性和信息工程学的实际应用能力要求高,在培养我国大学生专业体系的知识观念、创新意识思维和综合科研实践能力三个方面都起到了重要指导作用。所以许多国家在一些重点高等院校和重要科研机构把线性系统理论课程设置为研究生专业基础和本科生的专业必修课。
该课程中包含有相当数量的系统数学理论推理、抽象概念,且各类数学计算较为复杂,学生在学习过程中普遍反映此课程的学习难度大。虽然学校配备了一些模拟仿真教学实验,但由于部分学生只是机械地模仿复制学校实验室的做法,对该校各门学科课程基础知识的整体理解和实际应用方式缺乏整体感官上的认识,所以会产生课堂教学与课外实践相互脱节的情况。
针对这些实际问题,引入了以倒立摆的案例分析教学法对程案例进行教学改革[3],教师根据线性系统理论课程的具体教学大纲、目标及教学要求,采用一些实际的相关工程技术案例,引导广大学生积极参与案例分析、设计和专题讨论,使广大学生将所学理论知识在实际工程案例中也能得到有效应用,从而不断培养广大学生参与分析和设计解决实际相关工程技术问题的综合能力。
1 线性系统理论案例的建设原则
《教育部关于加强专业学位研究生案例教学和联合培养基地建设的意见》(教研[20151]号)中,对案例教学作出了明确说明:案例教学是把学生放在教学的中心,将案例当作核心,给出具体的案例场景,在实际场景中学习,完美的结合实际与理论,引导学生发现、分析、解决案例中的问题,进一步发展到能对理论知其然,知其所以然地步的一种教学方式[4]。
“线性系统理论”课程中所涉及到的概念、方法、理论和总结在控制理论其余的课程中都具备一定的指导作用。变通的使用课程中所授知识是学生完成后续科研工作的基础。以倒立摆系统为对象进行案例设计,实现倒立摆系统的极点配置和LQR最优控制,能更加深入地去掌握并了解本课程在各种典型系统状态空间的建模、对系统进行诸如可配置极点等分析的应用,进一步提升研究生的实际问题分析能力和解决问题能力。线性系统理论案例构建过程遵循如下原则。
1.1 线性系统理论案例的真实性
培养实践技能是对控制类专业学位硕士研究生的基础要求,其培养的重要目标是重视理论基础、理论实践。线性系统工程理论实践案例只有充分反映线性控制系统工程的理论真实性,才能真正使学生在毕业后的实际案例操作过程中把握相关工程的控制设计规律,更好地接近控制工程的实际,从而才能获得事半功倍的培养效果。
1.2 线性系统理论案例的代表性
线性系统案例的内容是判断案例体系建设成败与否的基础和关键,案例体系建设之初必须精选出相应的案例主题,注重其对于案例体系建设的内容。结合我国经典的控制体系和软件控制流程,选取了一些具有国际代表性和示范意义的案例,使得这些案例能够在大学生们进行控制的过程中起到启发、诱导和促进的作用,还能将成功的案例和解决方法自觉地运用于实际生产生活。
1.3 线性系统理论案例的完整性
对于专业学位研究生课程的教学既要十分注重对学生的理论和实践相互结合的综合素质培养,还要充分培养他们夯实自己的理论功底,鼓励他们在理论、算法上进行了大胆的尝试、创新。没有坚实的专业知识背景及其理论所做的支撑,没有坚实的课堂教学专业知识基本背景和其教学理论的支持。学生在学习、工作、成长等方面,很容易感到落后而丧失信心。因此,对于工程学专业的学生来说,在强调其理论和实践能力的同时,还需要重点研究其基本理论知识。案例也需要考虑理论分析的完整性、逻辑性、准确性和开拓性。
1.4 线性系统理论案例的详细性
为了起到工程案例所具有的示范作用,案例中所需要采用的各种工程问题解决办法都应尽量准确,且其解决办法明确、具体,无歧义。对于具体的控制性问题,在构建案例时不但要详细地分析各个控制量、被控制对象,建立一套被控制量影响的数学模型,而且要详细地给出所需要的控制仪表选型、参数设置、控制量和输出等各个环节的讲解,使得广大大学生按照自己构建的案例不仅能快速地搭建一套具体的控制管理系统,实现具体的控制性问题解决方案,而且还能随时修改控制算法、控制参数,观察其增加和减少控制量的作用和效果。
2 倒立摆课程案例的建设优势
根据线性系统理论课程案例建设遵循的真实性、代表性、完整性及详细性原则,倒立摆系统作为日常生活生产常用且典型的多变量系统,倒立摆入选线性系统理论案例库具有一定的优势。倒立摆系统主要包括系统建模、分析与控制等内容,嵌合线性系统理论课程多个基础章节知识,满足教学案例选择的完整性及详细性原则。具体如下。
2.1 案例选择的实用性
有关倒立摆系统的研究也有很大的实际价值,常见的各种有关重心和支点问题的分析和控制,甚至航天器和各种云伺服电机的分析和控制,都和倒立摆控制问题不谋而合[5]。因此,对其稳定控制系统的研究价值是在实践中存在的,这里有更具应用性的场景,例如,海上钻井平台稳定控制,导弹阵地控制,机器人双腿行走结构等,由此可知,将倒立摆系统作为教学案例非同寻常的实际价值和理论价值。
2.2 控制对象的代表性
倒立摆系统具有明确的原理和较易于实现的设计,倒立摆系统作为多变量系统的代表,可以将多变量控制系统理论中存在的复杂问题,通过在现实的实验室条件下搭建來进行试验来解决和研究。针对课堂教学线性系统理论的实验模型,从实验模型的概念去考虑,倒立摆系统自然会满足需求,还被视为实验模型在数控技术中的应用和推广。
2.3 建设内容的完整性
倒立摆系统可以分为两类,单级倒立摆和多级倒立摆,根据Lagrange方程可以分别建立这两类系统的数学模型;讨论有限时间和无限时间情形的线性二次型最优控制问题,给出线性二次型最优问题的算法、类型、最优解的形式及属性,分析矩阵形代数方程的解法;单级和多级倒立摆系统的最优控制器由线性二次型最优控制理论所给出,进而在控制器的作用下完成倒立摆系统仿真;硬件实现单级和多级倒立摆系统进行实验验证。通过系统建模、控制实现、结果仿真、实验验证等环节,让学生从中感受案例教学的实践性成果。
3 倒立摆课程案例的建设内容
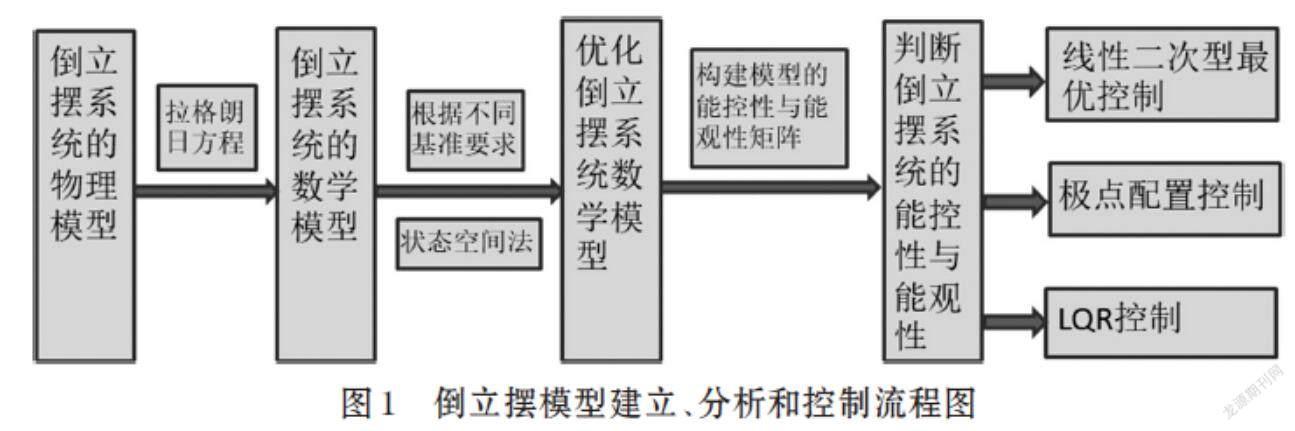
线性系统理论作为线性系统的时域理论,主要是以状态空间方法为主对线性系统进行分析。主要内容包括:系统的数学描述,系统的分析理论,系统的设计理论。倒立摆的模型建立、分析和控制的流程如图1所示。根据线性系统理论的课程内容安排,倒立摆系统课程案例的建设内容如下。
3.1 倒立摆实验器材
单级和多级倒立摆主要包括其机械结构、PCI-8333数据采集卡、驱动电路板、供电电源板组成。倒立摆机械结构有四部分组成。PCI-8333上的中断源实现位置和角度的定时采样;用12位的A/D实现位置和摆杆角度的采样;使用12位的D/A实现控制器控制信号的输出。驱动板能够实现的是数据采集、滤波、PWM脉宽调制的输出及功率放大等。分别采用电源芯片LM1812、LM7912、LM7805、MAX876、LM338,设计相应的电源电路。倒立摆控制系统的控制程序是在VC条件下编译的,模块化程序的引入使得后续开发更加容易。
3.2 倒立摆系统的数学模型建立
具有代表性的单级倒立摆系统,整个后支架、转子和其他装置安装在固定导轨、发动机底座的钢骨架结构上。在建立模型时,必须忽略机械元件的次要元件。根据拉格朗日方程可以去建立实际所需系统的数学模型;根据不同基准的要求,进一步简化所得到的数学模型,并且也可以使用状态空间表示法来表示系统模型。
3.3 能控性和能观性检验
不同的控制手段和方法去控制不同种类的倒立摆,已经成为最具有历史和挑战性的研究课题之一。对线性时不变系统来说,构造能控性判别阵,可由其秩验证系统的能控性,如若该矩阵具有满秩的特性,则说明系统能控。类似的方法是构造能观性判别阵,并由其秩来验证系统的能观性,如若该矩阵具有满秩的特性,则说明系统能观。
3.4 线性二次型最优控制
线性二次最优控制理论是指技术上最有意义、理论上最综合的线性系统理论,以及系统综合合理性的优化问题,其特点是系统控制的必要性,在这种情况下,首先讨论有限时间条件下的线性二次最优控制,其中给出了线性二次最优问题的形式和属性,然后给出了无限时线性二次最优公式和类型,最优解的形式和属性。将线性二次最优控制问题归结为求解矩阵代数方程,最后讨论了矩阵代数方程的求解方法。
3.5 极点配置控制器设计
為了更好地使单级和多级倒立摆系统的极点达到符合所需要的瞬态和稳态性能指标,需要把单级和多级倒立摆系统的闭环和稳态极点都配置到所期望的位置上,而这种闭环系统的极点配置可由极点配置控制器自行设计的状态回馈控制器来实现。首先,在倒立摆系统的建模中已经检测到验证了系统是一个完全能控而又能观的系统;随后,根据系统的要求,使用状态反馈将闭环极点选择在留有一定余量的位置,再经过大量的数据分析即得到预期的闭环极点;最后,将计算所得的预期期望闭环极点代入特征方程组,从而得到反馈增益矩阵。
3.6 LQR控制器的设计
LQR控制器的设计思想是通过优化线性系统的性能指标函数从而设计出目标极小的控制器[6]。根据系统线性条件下的状态空间方程,使得性能指标函数能够取得最小,进一步得到系统的控制量,利用求解Riccati代数方程计算出对称矩阵和状态反馈阵。在考虑实际系统中存在干扰、模型不确定性以及实际系统存在的限制的情况下,对系统进行了仿真结果的分析与研究,结果证明所设计的单级、二级、三级倒立摆控制器具有良好的鲁棒性能与高度的抗干扰能力。
4 结束语
通过典型的倒立摆线性系统仿真案例的分析和设计,学生不仅能直观地认识、理解倒立摆线性系统基本的构造和实际操作原理,而且能全面且深入地认识理解状态空间的建模、能控能观性判断、李亚普诺夫稳定性理论、极点配置方法和LQR控制器的设计等线性系统的理论实践内容,熟练地选择并使用仿真软件。该实践案例丰富了其教学内容,大大提高了教学质量,提升了本专业学生综合运用所学的理论知识来分析和解决实际工程问题的能力。
参考文献(References):
[1] 张大克,邢化明,张立东,等.基于数学技术培养的研究生数学课程教学改革[J].中国轻工教育,2020(2): 76-79
[2] 吴小娟,黄洋.《线性系统理论》课程多元化教学探索[J].产业与科技论坛,2020,19(4):204-205
[3] 张启敏,马婧英,王战平.案例教学法在现代控制理论课程教学中的应用[J].科教导刊,2020(6):113-114
[4] 杨迎花,王华静,谢运甫,等.有机化学实验教学中课程思政的探索与实践[J].中国轻工教育,2021(1):73-76
[5] 王杰,尹慧琳,伍淑莉.基于强化学习的倒立摆控制问题研究[J].信息通信,2019(5):31-33
[6] 周勇.环形倒立摆系统改进遗传算法的LQR控制研究[J].机械工程与自动化,2020(3):31-32
