关于不同建模软件模型拼接测试
2022-06-19时斐李真程圆娥
时斐 李真 程圆娥

摘要:倾斜摄影测量技术是国际测绘遥感领域近年发展起来的一项高新技术,以大范围、高精度、高清晰的方式全面感知复杂场景,通过高效的数据采集设备及专业的数据处理流程生成的数据成果直观反映地物的外观、位置、高度等属性,为真实效果和测绘级精度提供保证。本文通过几款三维建模软件同一场景下不同内容的建模测试,对于不同建模软件建模拼接提出了相关的问题和设想。
关键词:建模软件 背景 环境 数据
1 测试背景
三维建模在测绘行业、城市规划行业、旅游业,甚至电商业等行业的应用越来越广泛,且越来越深入[1]。而目前市面上三维建模软件繁多,各有优劣,下面列举几款市面上比较主流的建模软件。
1.1 ContextCapture软件
ContextCapture是Bentley公司于2015年收购的法国Acute3D公司的产品。ContextCapture生成的三维模型效果较为理想,人工修复工作量较低,但是软件比较复杂,不易上手,且价格较高。
1.2 瞰景Smart 3D软件
瞰景Smart 3D软件是一款国产自主研发实景三维建模软件,具有空三能力强、建模效率高、自主国产、安全可控等优点。
1.3 Pix4Dmapper软件
Pix4Dmapper软件是瑞士Pix4D公司的全自动快速无人机数据处理软件,是集全自动、快速、专业精度为一体的无人机数据和航空影像处理软件[2]。
1.4 大疆智图
大疆智图是一款提供自护航线规划、飞行航拍、二维正射影像与三维模型重建的PC应用软件。一站式解决方案帮助行业用户提升航测内外效率,将真实场景转换为数字资产。
如此繁多的三维建模软件,各有优劣,那是否可集各家之长,把最终的成果拼接在一起,以达到一个最理想的模型效果,减少后期人工修模的工作量,为此进行了一系列的测试[3]。
2 测试环境及数据
2.1 测试环境
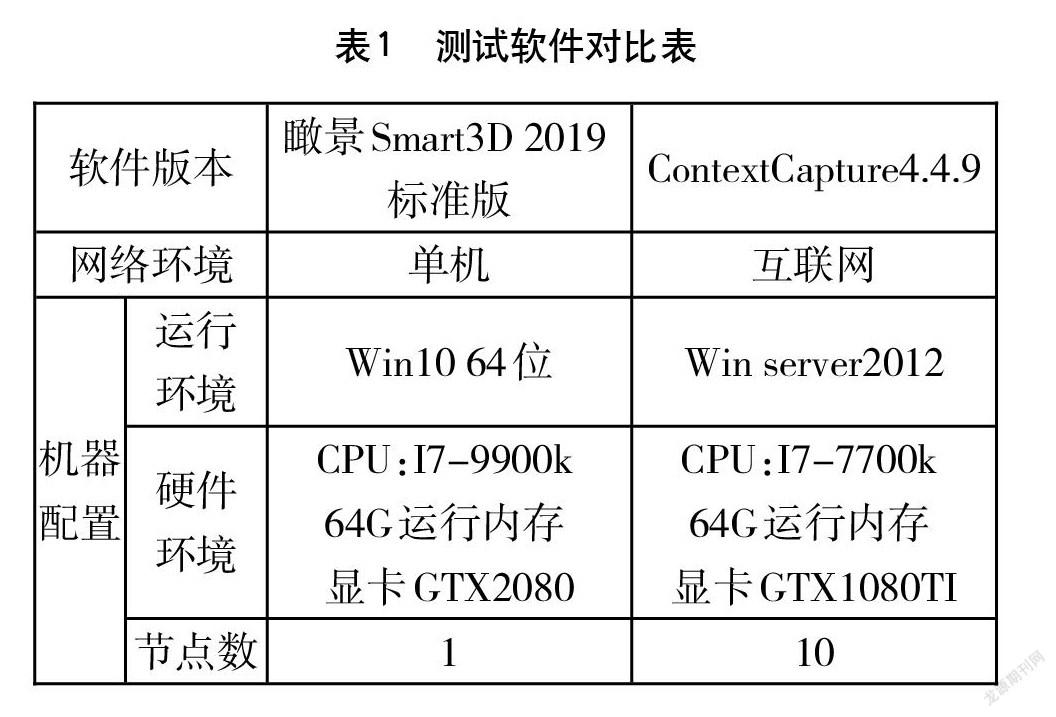
本文选取了2款算法较为接近的软件,即瞰景Smart 3D软件和ContextCapture软件(下面简称CC)进行测试。测试软件对比如表1所示。
2.2 测试数据
本文选取了无锡雪浪小镇作为这次测试数据的采集地点,利用大疆精灵4RTK对雪浪小镇周边0.75km2的区域进行航拍,飞行高度100m,航向重叠度75%,旁向重叠度70%,获取照片6259张。
3 测试
3.1 测试A
3.1.1 测试内容
首先利用CC和瞰景Smart 3D这2款建模软件,对从无锡雪浪小镇采集回来的数据同时建模,并且对建模时候的模型分块原点坐标、模型输出坐标系、模型分块大小等具体参数进行了统一设置,模型生产后将2款软件构建的模型进行重合查看。
测试内容:CC和瞰景Smart 3D对同一场景建立的模型能否重合。
模型分块大小:160m。
选取模型块数:4。
模型分块原点坐标:X为244274,Y为3485436,Z为0。
模型输出坐标系:CGCS2000/3-degree Gauss-Kruger CM 120E(EPSG:4549)。
3.1.2 测试结论
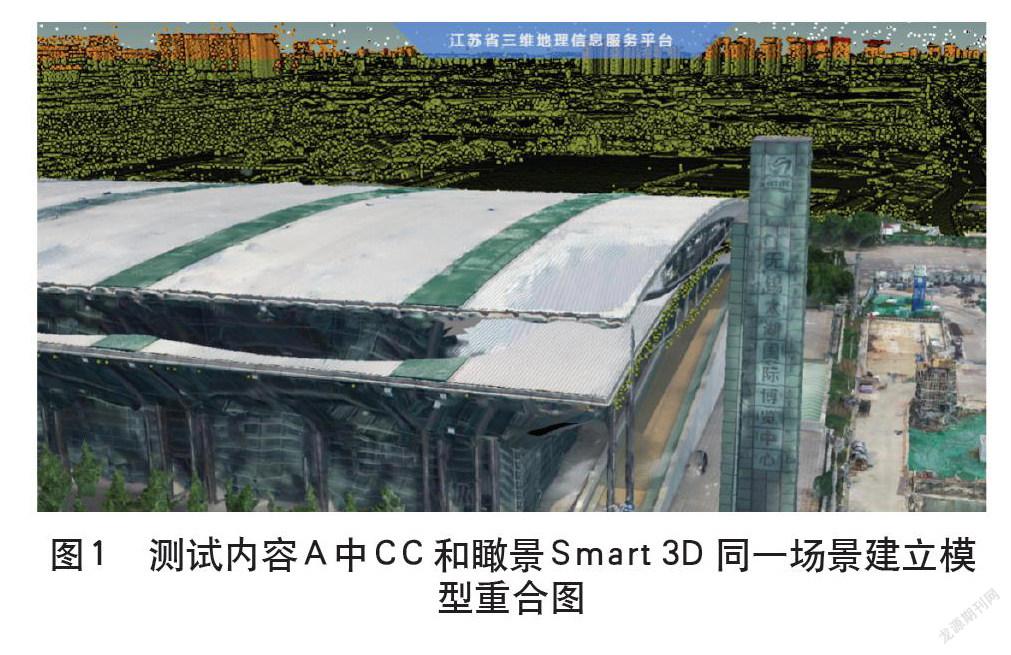
2款软件建立的模型不能重合,水平方向存在1~2m的误差,高程方向存在7~8m的误差,在导入测试区域点云信息后发现,瞰景Smart3D软件建立的模型与点云精度偏差较小(见图1)。
3.1.3 测试结果疑问
为什么高程会出现如此大的偏差,是不是高程坐标系出现了问题?
3.1.4 测试结果分析
在查看2款建模软件时发现,在导入照片时CC默认的高程坐標系为EGM96(EGM96模型是美国推出的一种适用于全球范围,并综合利用现有全球大量重力数据所计算出来的高精度大地水准面模型[4],但是因其发布年代较早,并且缺乏中国地区重力数据,所以高程转换精度较低),而瞰景Smart3D软件在导入照片的时候默认没有选择任何高程坐标系。为了验证这个怀疑,再次进行了测试B。
3.2 测试B
3.2.1 测试内容
重新用2款建模软件进行建模,在导入照片时对高程坐标系进行了统一设定(设定为EGM96),其余设置与测试A相同,再次进行建模,建模完成后放置一起进行重合查看。
测试内容:导入照片时候的高程坐标系对模型的影响。
导入照片时候的高程坐标系:Smart3D为EGM96,CC为EGM96。
模型分块大小:160。
选取模型块数:4。
模型分块原点坐标:X为244274,Y为3485436, Z为0。
模型输出坐标系:CGCS2000/3-degree Gauss-Kruger CM 120E(EPSG:4549)。
3.2.2 测试结果
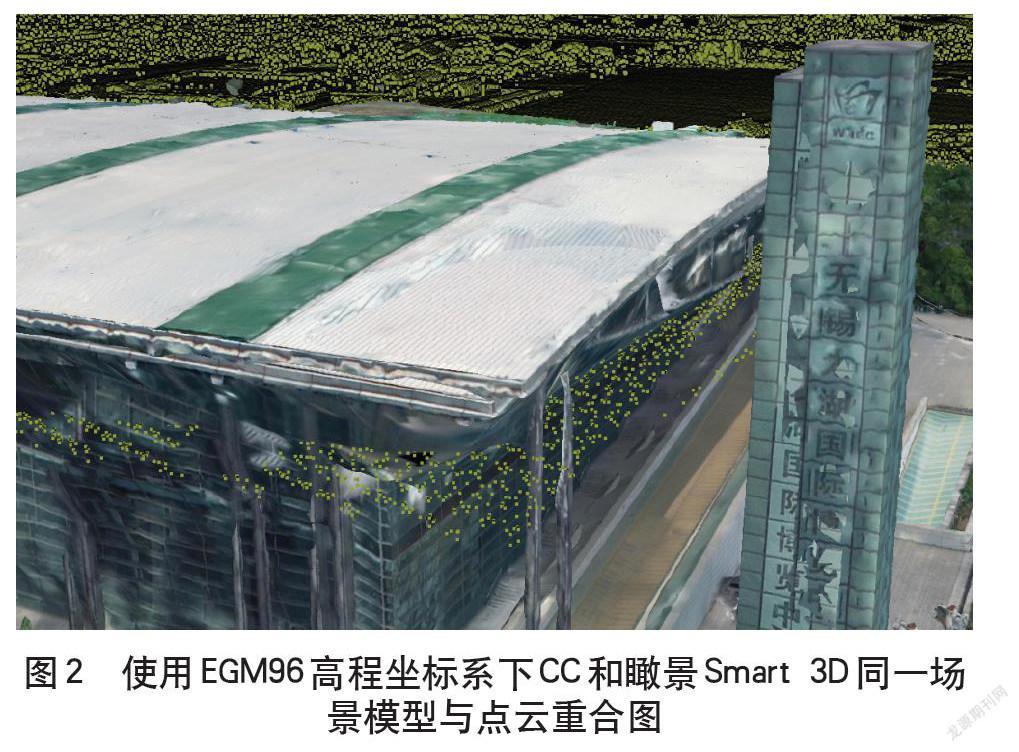
当2款软件导入照片时使用相同的高程坐标系后,生成的模型基本可以重合,水平和高程误差都在1~2m左右,但是导入测试区域点云数据后发现,点云与模型存在较大高程差异[5](见图2)。
3.2.3测试结果疑问
明确了EGM96会导致模型高程出现误差,那在导入照片的时候有没有方法能更改高程坐标系?带着疑问进行了测试C。
3.3 测试C
3.1.1测试内容
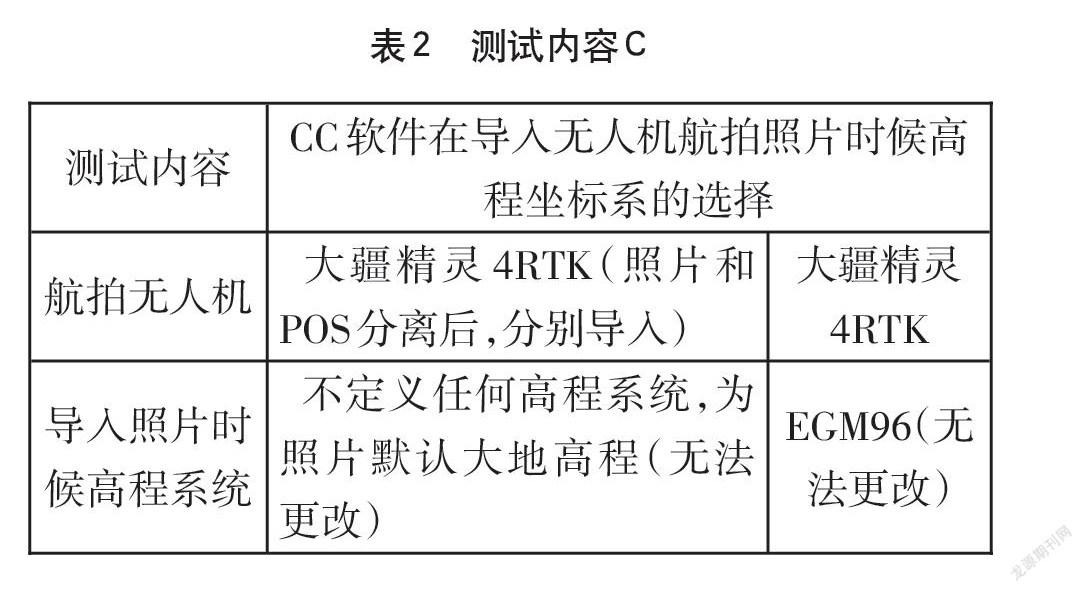
首先对CC软件在导入无人机航拍照片时进行高程坐标系的选择,结果发现无法进行选择,通过软件将照片的POS和照片信息分离后再次分别导入CC,CC就不会定义任何高程坐标系,见表2。
3.3.2 测试结果
由于大疆精灵4RTK所拍摄照片的POS信息是和照片一起的,所以CC在导入大疆无人机拍摄的照片时会默认定义这些照片的高程系统为EGM96,从而导致计算出的模型高程出现偏差。而将大疆精灵4RTK所拍摄照片的POS和照片分离后,再通过CC分别导入,CC就不会定义任何高程坐标系[6]。
3.3.3 测试结果疑问
当照片和POS分别导入的时候,CC不再定义任何高程坐标系,建立的模型是否会有高程偏差?CC和Smart3D在导入照片时候都不定义高程坐标系,那它们默认的高程坐标系是否相同?带着疑问,进行了测试D。
3.4 测试D
3.4.1测试内容
再次用2款建模软件进行建模,在导入照片时对高程坐标系进行了统一不进行设定,其余设置与测试A相同,再次进行建模,建模完成后放置一起进行重合查看。
测试内容:导入照片时候的高程坐标系对模型的影响。
导入照片时候的高程坐标系:Smart3D无,CC无。
模型分块大小:160。
选取模型块数:4。
模型分块原点坐标:X为244274,Y为3485436, Z为0。
模型输出坐标系:CGCS2000/3-degree Gauss-Kruger CM 120E(EPSG:4549)。
3.4.2测试结果
当2款软件导入照片时都没有选择高程坐标系后,生成的模型基本可以重合,水平和高程误差都在1~2m左右,导入测试区域点云数据后,偏差较小(见图3)。
4 结语
虽然采用的是同一台无人机的航拍数据,但是由于各种建模软件的算法差异,各种软件对同一区域建立的模型无法做到套合,由于本次测试数据没有事先布设控制点,加入控制点纠正后能否完美地拼合在一起,还有待后期测试。CC作为一款国外引进的建模软件,在导入含有POS信息的照片时,如果不额外再次导入照片POS信息,会默认定义照片的高程坐标系为EGM96,且会对后期计算的模型的高程造成影响,因此需要从照片中分离出POS信息,分别导入,才能默认为照片的大地高程。
參考文献
[1]杜金莉.基于ContextCapture的三维建模研究[J].地理空间信息,2021,19(5):53-54,58.
[2]张津裕,蔡俊林,李成文,等.基于DJI Phantom 4 Pro和Context Capture的煤矸石山实景三维建模[J].煤炭技术,2020,39(8):94-97.
[3]程铁洪,黄磊.倾斜摄影三维建模软件性能对比研究[J]. 中国科技纵横,2020(8):42-43.
[4]王杨玚,钟永康,董啸.基于倾斜摄影的三维模型重建的可行性研究[J].科学技术创新,2021(17):161-162.
[5]李云,刘专,彭能舜,等.倾斜摄影三维模型的大场景地形融合研究[J].测绘科学,2018,43(7):103-108.
[6]朱周华,吕志慧,于建强.倾斜摄影三维模型实体提取和动态表达的技术研究[J].江苏科技信息,2020,37(27):58-62.
