“天空地深”综合勘查方法在华兵铁矿采空区勘查中的应用
2022-06-15多晓松付茂盛张婉怡
多晓松,付茂盛,张婉怡,张 博
(1.华北地质勘查局五一四地质大队,河北 承德 067000;2.河北省矿山地质灾害预警技术创新中心,河北 承德 067000;3.承德市矿产资源评审中心,河北 承德 067000;4.河北省水文工程地质勘查院,石家庄 050000)
华兵铁矿由于多年矿山开采,历史遗留下部分浅埋采空区,采空区的形成破坏了原有顶板围岩的应力平衡,改造了矿区地质环境条件。部分采空区虽未发生塌陷,但形成潜在的塌陷安全隐患。2017年8月,华兵选厂发生采空区塌陷事件,形成深约40 m的塌陷坑,致使华兵选厂全部陷入地下,造成巨大的经济损失;2019年7月,华兵铁矿选厂再次发生采空区塌陷。采空区塌陷发生后,地质环境发生变化,矿区出现多处地裂缝,影响矿山安全生产,威胁矿山职工生命财产安全,已经成为当地重要的社会问题,急需查明采空区分布及规模,为采空区治理提供数据。
近些年来,科技不断发展进步,已有多位专家学者对金属矿山尤其是有色金属矿山采空区进行了研究,并取得较好的探测效果。时彦芳等[1]对磁测、高密度电法、CSAMT法综合应用,分析采空区探测效果;韩术合等[2]采用音频大地电磁测深法、瞬变电磁和单位地震对某煤炭采空区进行了研究;彭朝晖等[3]采用电阻率剖面法、磁法、激发极化法等对冀东铁矿采空区取得较好效果;门业凯等[4]采用高密度和地震映像法对露天铁矿采空区进行了分析等等。
本文通过改进传统采空区勘查方法手段,选用遥感形变监测、微动勘探、TRT超前地质预报、三维激光扫描等手段,对采空区进行了验证,取得了较好的成果,为采空区充填治理提供了较为精准的数据。通过传统勘查方法与高新技术方法的组合使用,有效解决了地形、地貌及生产要素等因素的影响,为绿色矿业开发、建立科学完善的政策法规体系提供了新的理念[5-8]。
1 采空区勘查方法概述
由于该矿山开采多年,历史遗留问题较多,首先对矿区进行地形测量、工程地质调查与测绘、矿山搜集资料,对地质及采矿情况、地表及建筑物变形、地下水、采空塌陷治理情况、地下巷道、崩落法采坑、地貌等进行调查,重点查明矿区内及周边矿区的开采起始时间、开采方式、规模、开采矿层、产状、采深采厚比、回采率、顶板管理方式、矿柱留设情况等,对矿区进行初步“问诊”。
然后采用PS-InSAR遥感形变监测、无人机摄影测量及激光LIDAR进行不同时序扫面工作,确定靶区区域。采用瞬变电磁、微动勘探、超前地质预报等方法对靶区内异常精确定位,采用工程地质钻探与三维激光扫描进行异常验证,获得采空区精确数据,为采空区稳定性分析及充填治理提供依据(见图1)。

图1 “天空地深”一体化采空区勘查体系简图Fig.1 Schematic diagram of "Space-Sky-Ground-Depth" integrated goaf exploration system
2 天基
主要是利用PS-InSAR卫星遥感数据时空序列监测,选取不同时序的卫星遥感数据进行地表沉降异常分析。InSAR探测结果精度高,探测时间连续,可以精确监测采空区长期地表变化情况,尤其对老采空区探测[9],方法有效。
通过PS-InSAR非接触观测对全区进行地表形变监测异常值,来探寻华兵矿区可能存在的采空区。为了有效地实现 PS-InSAR 矿区沉陷长时序形变监测,选取矿区自2018 年10月至2019年7月Sentinel-1A影像和空间分辨率为30 m的 SRTM DEM 作为监测数据。Sentinel-1A卫星重访周期为11 d,其影像入射角为41.1°。
PS-InSAR结果显示矿区内整体形变表现为沉降趋势,沉降速率3~11 cm/a,监测周期内最大累积沉降为14 cm,采区内竖井旁形变速率集中在3~5 cm/a,最大沉降形变处可达14 cm/a,沉降异常推测为采空区顶板所引发的地表形变(见图2)。

图2 矿区PS-InSAR遥感形变监测年平均形变速率图Fig.2 Annual average deformation rate of PS InSAR remote sensing deformation monitoring in the mining area
3 空基
主要是利用无人机摄影测量和三维激光扫描(LIDAR),采集不同时序的地表沉降形变的点云数据,通过特定算法及DEM模型叠加技术反演采空区地面沉降时空序列结果,并叠合到采空区三维立体模型中,精准、立体、直观展示采空区地面沉降变化结果[10]。
3.1 无人机摄影测量建模技术及形变监测
无人机摄影测量技术提供勘查区正射及倾斜影像,弥补InSAR相干失真等不足,同时,多期无人机生成的DEM、DSM的差分精确展示了矿区地表的形变。选用大疆精灵4无人机搭载定位系统(POS)和数据记录器采集高精度点云数据,并在Agisoft PhotoScan Professional v 1.4.3中进行处理,点云的分辨率将降低到每米10点。进一步对每个点云图像进行滤波,去除植被覆盖等地表物体,生成裸地数字地形模型(DTM)(见图3)。

图3 矿区全区正射模型影像图Fig.3 Orthophoto model image map of the whole mining area
本次研究获取华兵矿区无人机影像399张像片,生成密集点云74 539 650个点,控制点误差0.057 315 m,生成白模共12 067 457个面,6 071 214个顶点三维模型大小约1.1 km2。对选定的区域进行无人机精细分析,结果显示在无人机影像上表现为大量级大规模形变,两期无人机监测期间,塌陷区沉降明显,可达5~10 cm,滤除极值后,矿区靶区内仍有多处形变量较大区域。
3.2 三维激光扫描 LiDAR三维模型构建
基于多棱镜快速旋转扫描技术,能够产生完全线性、均匀分布、方向单一、完全平行的扫描激光点云线。三维激光扫描LiDAR解决了传统监测手段的各种不足,如监测点密度小、监测精度低、监测周期长、监测点易损坏以及人员安全难以保证等。三维激光扫描技术在塌陷坑沉降监测中的关键在于两期点云数据的匹配,点云数据匹配误差主要来源于标靶点的测量误差。选择基于标靶的点云数据采集方法以及选择稳固的起算基准有效降低了匹配误差,从而保证了塌陷坑两期点云数据在同一基准下,以此提高了三维激光扫描LiDAR在监测中的精度。此区域共扫描测站11站,点云1.3亿,通过点云拼接、去噪、滤除植被、及抽稀处理后,生成TIN三角网,并获取研究区高精度(10 cm)DTM栅格数据。通过LiDAR生成DTM与二期无人机生成DTM作差可见,研究区5~6月、6~7月趋势相同,交叉验证了InSAR结果与无人机差分结果的准确性。
结合多期无人机、LiDAR差分结果与InSAR形变速率结果综合分析,圈定华兵采区内高风险区域处(见图4)。

图4 华兵采区多结果叠合高风险采空区区域图Fig.4 Regional map of multi-result superimposed high-risk goaf in Huabing mining area
4 地基
该系列方法中,采用设备较多,主要是通过遥感监测后确认的靶区区域,进行异常靶区精确定位,主要采用瞬变电磁法、微动勘探、超前地质预报等方法进行靶区异常定位。
4.1 瞬变电磁
瞬变电磁法(TEM)是一种时间域人工源的电磁法,具有较高的抗干扰能力和分辨率。发射线框供一直流电流,然后突然切断电源形成瞬态的磁场,在地下形成涡流,通过记录地下涡流变化的情况来达到了解地下电阻率的目的[2]。
本次勘探共设置26条TEM测线,测线角度NE54°,线距20 m,点距5 m,共计TEM点放样529个,检查点21个。由于该方法剖面较多,选取400、360 m水平切片进行验证(见图5、6)。

图5 华兵采区TEM勘查400 m水平切片图Fig.5 400 m horizontal slice of TEM exploration in Huabing mining area
图5中的高阻异常YC2、YC4、YC5和图6中的高阻异常YC2、YC4、YC5在异常范围和位置大致相同,在相关测线的断面图反映也较明显,且和已知明采坑道回填范围较符合,推测还有采空区存在的可能。在推测可能存在采空区的异常区域,布设微动勘探点,以验证采空区存在的可能性。

图6 华兵采区TEM勘查360 m水平切片图Fig.6 360 m horizontal slice of TEM exploration in Huabing mining area
4.2 微动勘探
微动勘探,是从自然界存在的各种微弱震动中提取瑞利面波的频散特性,最后通过对频散曲线反演来推测地下的横波速度分布。微动勘探是为了确定地下采空区位置,勘探深度小于 100 m,通过试验确定本次天然源面波勘探采用 10个拾震器布置成嵌套式等边三角形台阵,最大边长为20 m,采样间隔 5 ms,以充分接收低频信号,采样时间根据采用数据达到勘察深度时终止[11]。
该区存在未充填采空区,且该采空区位置与遥感异常、电法勘探400、360 m切片异常二相吻合,在华兵采区布置了10~13号共4个面波勘探点。11号勘探点位于已塌落并回填的塌陷区上部,10 号、12号勘探点位于塌陷区边缘,13号点位于推测采空区正上方。
图7为10~12号点的等速度剖面图,由Vr速度剖面图可见,该处地层速度逐渐增加,无明显低速区、无速度突变。据相关资料,此处采空区位置可能已较好回填。由Vx速度图可见:约20~30 m深度处可见多个低速地层,可推测此深度范围内地层较为破碎,推测为采空区回填位置。在约54 m深度,存在厚约5 m的低波速地层,推测此处可能存在矿山巷道。通过13 号勘探点的Vr与Vx速度柱状图(图8)可见,约40 m以浅的地层速度逐渐增加,无明显变化。在约 40 m深度处面波速度发生了突变(箭头标示处),推测此处为采空区顶板界面。

图7 10~12 号测线速度剖面图Fig.7 Velocity profile of line 10~12

图8 13 号勘探点 Vr 和 Vx 速度柱状图Fig.8 Histogram of Vr and Vx velocities at exploration point 13
微动勘探受地形影响较大,同时微动勘探在测得采空区顶板后由于波速无法穿透采空区,所以只能测得采空区顶板,不能反映采空区位置、规模等,需引入超前地质预报进行探测。
4.3 超前地质预报(TRT)
超前地质预报(TRT)是基于地震波的反射原理,当人工激发的地震波在岩体内传播时,遇到声学阻抗有差异的界面(如断层、破碎带、富水体、节理裂隙发育带等),一部分信号波就会在界面反射回来,通过在探测面上布置的传感器来接收这类反射回来的波;另外一部分信号波会透射穿过有声学阻抗的界面进入前方岩体。运用层析扫描技术,形成探测区域三维探测图,能将前方岩体的具体情况,如软弱破碎带、溶洞、含水体、断层、破碎带的位置及大小规模立体、直观地展示出来[12]。
根据现场地质调查、遥感监测、电法勘探及微动勘探成果,结合采区地质概况和开采情况,分别沿着塌陷坑的垂向、平行、斜向布设了三条测线。
图9 规模尺寸为50 m×60 m×100 m,由图9可以看出,所探区域内异常区主要表现为局部块体异常,对应为采空区。其中,异常区1-1为采空塌陷区,深度方向(z)大致位于地下45~75 m处,长度方向(y)大致位于模型15~45 m处,宽度方向(x)大致位于模型15~40 m处。

图9 “华兵”测线 1 成果图Fig.9 “Huabing” results of line 1
图10规模尺寸为40 m×80 m×110 m,由图10可以看出,所探区域内异常区主要表现为区域散体异常和局部块体异常,分别对应采空塌陷区和采空区。其中,异常区2-1为采空区,深度方向(z)大致位于地下50~80 m处,长度方向(y)大致位于模型10~45 m处,宽度方向(x)大致位于模型15~35 m处;异常区2-2为采空塌陷区,深度方向(z)大致位于地下40~70 m处,长度方向(y)大致位于模型55~75 m处,宽度方向(x)大致位于模型10~35 m处。

图10 “华兵”测线 2 成果图 Fig.10 “Huabing” results of line 2
图11规模尺寸为40 m×80 m×110 m,由图11可以看出,所探区域内异常区主要表现为区域散体异常和局部块体异常,分别对应采空塌陷区和采空区。其中,异常区3-1为采空区,深度方向(z)大致位于地下45~75 m处,长度方向(y)大致位于模型20~50 m处,宽度方向(x)大致位于模型10~35 m处;异常区3-2为采空塌陷区,深度方向(z)大致位于地下40~65 m处,长度方向(y)大致位于模型55~75 m处,宽度方向(x)大致位于模型15~35 m处。
通过数据分析和现场调查,1-1、2-1、3-1三个疑似采空区均指向同一个位置,埋深在45~80 m。
5 深基
通过“天-空-地”等勘查手段对异常靶区精确定位后,论证工程地质钻探井位,采空区顶板穿透后,采用三维激光扫描对采空区进行扫描,确定采空区形态、大小、规模等,形成三维立体图像,对充填孔位及充填方量能较为准确地定位。
5.1 工程地质钻探
本次工程钻探工作使用XY-44型钻机,钻进方法为:金刚石钻头清水钻进,单管单动回转钻进成孔;开孔直径127 mm,终孔直径75~96 mm。
为验证电法勘探400、360 m切片异常2、4、5,在华兵采区分别布设ZK4、ZK5、ZK6三个钻孔(见图12、13),ZK4孔深34.7 m,采空区顶板深度28.3 m,底板深度33.0 m,空高4.7 m;ZK5孔深82.6 m,采空区顶板深度38.4 m,底板深度82.4 m,空高44.0 m;ZK6孔深84.0 m,采空区顶板深度64.3 m,底板深度84 m,空高19.7 m。三个钻孔的岩芯中均未发现充填物。
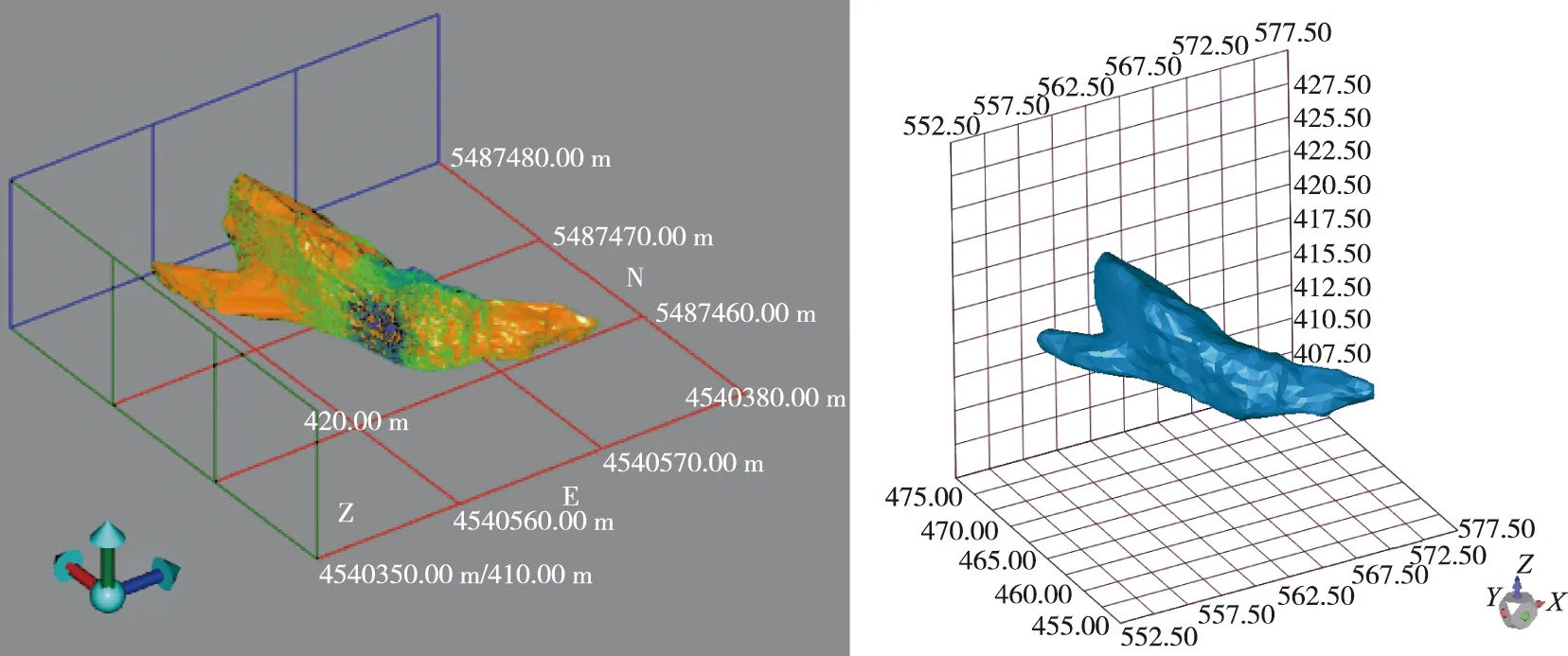
图12 ZK4精确模型整体显示Fig.12 Overall display of ZK4 accurate model
5.2 三维激光扫描(C-ALS)
三维激光扫描工作是基于已经完成的钻孔,放入三维激光扫描探头,查清地下采空区的形态及空间分布情况。C-ALS的有线遥测系统可将测量数据传回地面的控制单元。配置笔记本电脑,控制和获取数据。利用MDL的控制软件,在屏幕上显示出C-ALS摄像机捕获的镜头,并实时获取激光扫描生成的三维空穴图像。空区探测过程通过用RTK确定钻孔坐标,然后用罗盘测量出钻孔的方位角。C-ALS的完全定位只需一个孔口坐标作为定位的原点,有了原点坐标及方位角后C-ALS即可完成其余的定位[13]。
本次扫描首先进行了垂直方向扫描,然后,设定采用水平方向扫描,共进行了四次扫描。设置采空区扫描步长增量为1°,水平和垂直各扫描两次,设定完成后启动扫描,每次约60 min完成扫描工作。

图13 ZK5、ZK6精确模型整体显示Fig.13 Overall display of ZK5、ZK6 accurate model
通过三维激光扫描可知,ZK4采空区长21.07 m,宽14.59 m,高7.35 m,体积442.9 m3,ZK5、ZK6为同一个采空区,采空区长69.09 m,宽43.35 m,高49.09 m,体积29 280.6 m3。
6 结论
综合考虑勘查区地形地貌、矿区水文、工程地质的复杂性、矿区技术资料缺失、采矿技术方法多样性及周边电磁干扰等因素,探索性地选用了PS-InSAR遥感解译、无人机测量与LIDAR相结合的天空一体化采空区靶区探查技术,为采空区的精确勘查指定技术靶区[14]。
在勘查过程中,探索性地开展了微动勘探、超前地质预报(TRT)技术方法在采空区勘查工作中的应用,充分显示这些技术方法相互结合的技术优势,取得了良好的勘查效果。微动勘探克服了近似直立矿体采空区难以探测的技术瓶颈,超前地质预报(TRT)除探明采空区的大致形态规模的同时也对胶结充填采空区的充填效果进行了检验。
三维激光扫描(C-ALS)实现了采空区形态规模的精确测量,为采空区的定量分析和数值计算分析模型的建立提供了坚实可靠的技术依据,同时为采空区的后期充填治理提供了准确的充填位置与方量。
通过上述“天空地深”一体化多尺度技术方法的开创性综合应用和探测,实现了采空区形态、规模、位置的精确探查,为矿区采空区充填治理提供了可靠的数据基础,在其他金属和非金属矿山采空区的勘查中同样具有很大的技术优势和推广意义。
