基于STM32的可重复使用运载器闭环仿真系统*
2022-06-11朱天宇田国元夏立宇吴登辉
朱天宇,肖 剑,郑 浦,田国元,夏立宇,吴登辉
(上海航天控制技术研究所·上海·201109 )
0 引 言
随着科学技术的日益发展,人类探索宇宙的脚步逐渐加快。在这样的背景下,如何降低运载器发射成本,缩短研发周期,成为了国内外的研发重点。目前,人类进入空间的主要工具为一次性使用运载火箭,在执行发射任务过程中,一次性使用运载火箭会按照时序指令逐级分离,各子级一部分会坠入指定落点,一部分会留在太空,成为太空垃圾,这也是现有航天发射成本居高不下的主要原因。基于此,可重复使用运载器的设想便应运而生。
可重复使用运载器按照时间和技术成熟度大体可分为3个发展阶段:火箭飞机、航天飞机、两级入轨器等。近年来,Space X公司研制的两级入轨器——Falcon 9型可重复使用火箭取得了巨大成功。其发射成本仅为现有一次性使用运载火箭的十分之一,并且通过回收技术还可以实现快速发射,大大增强了空间竞争能力。随着我国运载火箭的发展,国内针对该项技术的探索也逐渐展开,2019年8月24日,由民营航天公司翎客航天研制的RLV-15型可回收火箭实现了300m悬停,并在飞行50s后以0.07m落点精度成功着陆。CZ-8R为基于“长征八号”(CZ-8)的改型,计划采用集束式回收方案,即通过一套回收装置实现3个模块的回收,这些模块占火箭总成本的70%。由此可见,可重复使用运载器的优势已经凸显,但研制一枚新型运载器,其较长的研发周期带来的高昂研制成本限制了该项技术的突破。因此,为了以快速且高效的方式验证可重复使用运载器的制导、导航及姿控等算法设计是否正确,本文旨在开发一套基于STM32的可重复使用运载器闭环仿真系统,用于验证其关键控制技术,降低研发成本,缩短研发周期。
1 总体方案设计
运载火箭控制系统及测试主要由飞行控制软件、对应单机和地面测发控系统组成。其中飞行控制系统通过测量装置、时序配电装置和飞行控制软件完成运载火箭状态的测量;地面测发控系统对飞行控制系统实施参数、功能进行地面检测,并操纵火箭发射。系统主要由测试、发射控制、数据处理、显示等硬件组成。运载火箭控制系统简图如图1所示。
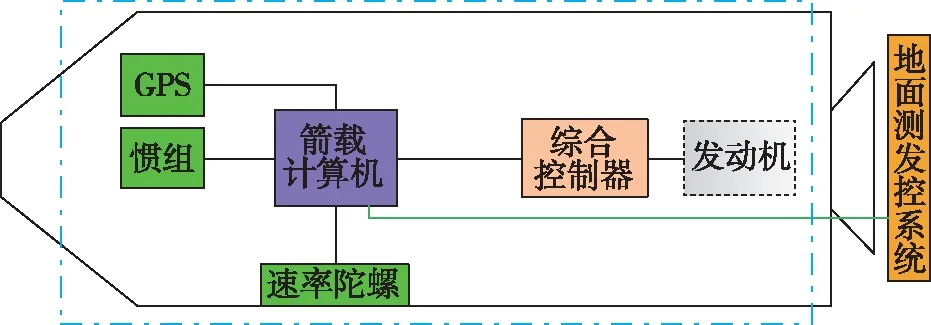
图1 运载火箭控制系统简图Fig.1 Launch vehicle control system diagram
参考运载火箭控制系统的基本组成,本文设计的可重复使用运载器闭环仿真系统主要由测量单元(模拟惯组)、箭载计算机模拟单元(模拟箭机)、执行模拟单元(模拟发动机特性)、地面测发控单元(包括动力学及箭地通信)和主控微机单元等五部分组成,该套系统具备以下特性:
1)实时测量运载器的运动参数、速度、位置和姿态信息;
2)实时计算运载器的当前状态,发出控制指令;
3)发射前进行自主初始对准,保证运载器安全起飞,在飞行过程中,根据运载器的运动参数和程序控制要求产生姿控信号,进行姿态调整,并保证运载器稳定飞行;
4)运载器发动机具有推力深度调节功能;
5)主控微机实时显示遥测数据;
6)惯性器件安装误差及发动机推力偏差的模拟;
7)故障模拟功能。
该套系统的设计简图如图2所示。其中,测量单元可实现可重复使用运载器的敏感器模拟及导航模型计算,主要功能为实时模拟惯组、全球定位系统(Global Positioning System, GPS)、速率陀螺等信号转换及等效信号的输出。其输入为惯组、GPS、速率陀螺等激励信号;输出为惯组、GPS、速率陀螺等输出信号。
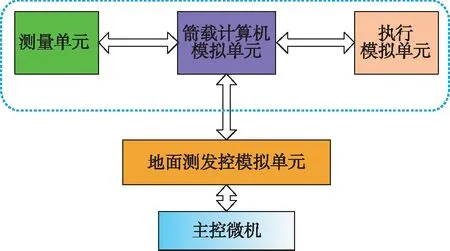
图2 闭环仿真系统简图Fig.2 Closed-loop simulation system diagram
计算机模拟单元可实现可重复使用运载器的GNC计算、时序计算及指令输出、系统测试、遥测数据获取及输出。主要功能是模拟箭载计算机执行GNC计算和指令输出、执行时序计算和指令输出、组织系统测试、组织遥测数据并输出。其输入信号为敏感器测量信号、飞行时序信号、地面测发控指令等;输出为GNC控制指令、时序控制指令、飞行遥测数据等。
执行模拟单元可实现可重复使用运载器的执行机构模型,同时可实现发动机故障的模拟。主要功能是模拟伺服系统、发动机工作。其输入为伺服摆角指令、发动机工作指令;输出为发动机工作状态和参数、发动机摆角等。
地面测发控模拟单元可实现地面测试的模拟,同时可实现飞行过程中动力学单元的模拟。主要功能包括运载器六自由度运动模型模拟、接收遥测数据并发送给主控微机和接收主控微机指令。输入是主控微机指令、初始状态、发动机工作相关参数;输出是控制指令、执行结果参数等飞行遥测数据。
主控微机可控制地面测试和飞行试验,实现飞行遥测数据的接收和实时显示,通过主控微机发送指令,主控微机软件和地面测发控单元通过LAN总线连接通信。
2 硬件平台搭建
结合数据处理需求及资源占用情况,本文设计的闭环仿真系统采用四块基于STM32H743ⅡTx芯片的开发板及一台预装Windows系统的主机组成。STM32H743ⅡTx芯片为STM32H7系列芯片,该系列芯片为基于32位Cortex-M7内核设计的高性能微控制单位(Microcontroller Unit, MCU)。利用L1缓存,无论是从嵌入式Flash还是外部存储器执行代码,处理器在400MHz频率下性能可达到2010CoreMark/856DMIPS。
硬件功能分配:四块开发板分别是测量单元、箭载计算机模拟单元、执行模拟单元和地面测发控模拟单元。地面测发控模拟单元与Windows中主控微机软件通过LAN总线相连,箭上各节点之间主要通过CAN总线进行通信。
四块开发板分别编号为1、2、3、4,分别对应测量单元、箭载计算机模拟单元、执行模拟单元和地面测发控模拟单元。1、2、3号开发板采用CAN总线通信,4号开发板与主控微机采用LAN总线通信,硬件系统框图如图3所示。

图3 硬件系统框图Fig.3 Hardware system block diagram
其中各板卡功能如下:
1)1号开发板输入惯组/GPS激励信号,输出惯组/GPS信号和遥测数据等;
2)2号开发板输入惯组/GPS信号,信号经过导航、制导、姿控运算后,输出姿控数据和GNC遥测数据等;
3)3号开发板输入姿控数据,输出发动机工作参数、发动机摆角和遥测数据等;
4)4号开发板接收主控微机控制指令、各开发板输出数据和遥测数据等,数据经过动力学模型运算后,输出执行结果。
3 软件设计
基于本文设计的硬件平台,该套闭环仿真系统软件部分主要包括飞行控制软件、动力学仿真软件及主控微机软件等三部分。
其中飞行控制软件运行于箭载计算机模拟单元上,用于完成可重复使用运载器飞行过程中的导航、制导、姿控、时序控制等飞行控制功能;动力学仿真软件运行于测量单元、执行模拟单元及地面测发控模拟单元上,用于模拟可重复使用运载器的质心动力学和绕质心动力学方程,以完成导航、制导、控制下的闭环飞行仿真功能;主控微机软件运行于主控微机上,用于完成地面指令的发送与接收、有线数据的实时接收等地面控制功能。
3.1 飞行控制软件
飞行软件整体架构包括硬件配置、中断和主程序三部分,其结构简图如图4所示。箭载计算机模拟单元上电后便进行硬件配置,配置完成后进入主程序,通过中断触发可实现数据接收及解析工作,中断执行完毕后继续主程序运算。
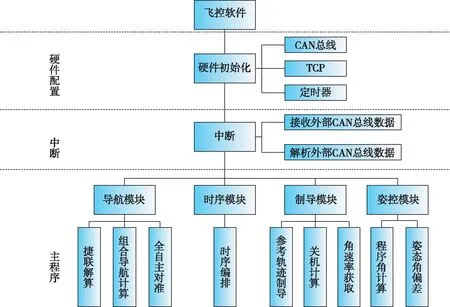
图4 飞行软件架构和模块结构图Fig.4 Flight control software architecture and module structure diagram
(1)导航模块
为实现可重复使用运载器的快速发射,优化运载器对准流程,导航模块在对准阶段采用凝固解析法粗对准+卡尔曼滤波精对准的全自主对准方案,飞行阶段导航模块采取惯组和全球导航卫星系统(Global Navigation Satellite System, GNSS)接收机简单重调的组合导航方法。
(2)时序模块
时序模块设计,按照相应测试需求,对相关时刻做适应性更改。基本时序安排如图5所示。

图5 时序安排图Fig.5 Sequence diagram
(3)制导模块
与传统运载火箭不同,可重复使用运载器涉及垂直上升、空中悬停、横向移动等相关动作,为保证可重复使用运载器发动机持续工作,抵消重力,缓速着陆于着陆点。制导模块全程采用参考轨迹跟踪制导方法,即根据飞行目标提前设计一条参考轨迹,基于实时加速度、速度、位置与参考轨迹的跟踪偏差,设计制导加速度指令为
(1)
式中,T、T和T为设计的制导加速度指令;、和为运载器北天东坐标系下速度;、和为运载器北天东坐标系下位置;ref、ref、ref为参考轨迹对应的加速度、速度、位置装订值,实际飞行中可对时间进行插值;、为需要设计的导引系数。
由制导加速度指令,进一步得到传递给姿控通道的俯仰、偏航程序角为

(2)
式中,c为姿控通道俯仰程序角;c为姿控通道偏航程序角。滚动程序角c固化为起飞前的初始姿态角,为常值。
(4)姿控模块
为应对不同飞行环境下的飞行特性,姿控模块采用滑模控制方案。滑模控制本质上是一种变结构控制方法,具备的不连续控制特性可以使系统沿着指定的状态轨迹做小幅、高频的上下运动,即滑动模态运动。由于滑动模态可以自行设计并独立于被控对象的参数及外界扰动,因而处于滑动模态的系统对模型不确定性具有较强的鲁棒性,本文设计的滑模控制器为
(3)
3.2 动力学仿真软件
通过动力学仿真软件模拟可重复使用运载器的质心动力学和绕质心动力学方程,以完成导航、制导、控制下的闭环飞行仿真功能。其主要由五大模块组成:推力特性计算模块、伺服特性计算模块、质心动力学计算模块、绕质心动力学计算模块、敏感器计算模块等。其中敏感器计算模块用于模拟惯性器件及GNSS模型。
3.3 主控微机软件
主控微机软件是可重复使用运载器在地面以太网通信的硬件环境下,实施地面自动化测试流程的计算机软件。主控微机通过指令控制地面测发控模拟单元完成控制系统自动配电、伺服子系统测试、稳定系统测试、模拟飞行测试、发射测试、临射功能检查,从而实现对整个控制系统测发流程的控制。同时,对接收系统各类状态信息和测试信息进行分析、判断和流程处理。结合本文设计的闭环仿真系统特性,主控微机软件采用C#编写,软件截图如图6所示。
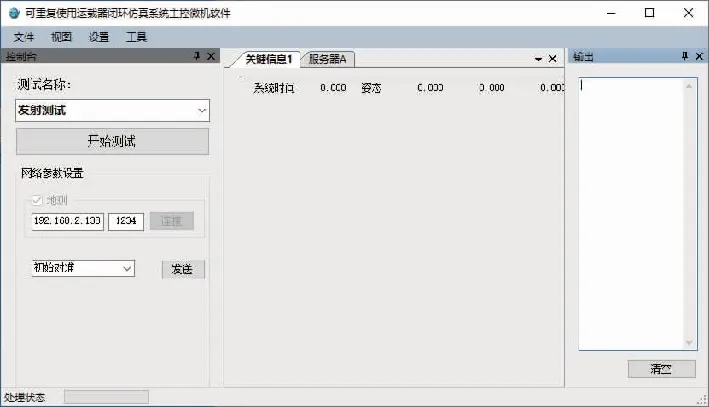
图6 主控微机软件界面Fig.6 Master control microcomputer software interface
4 试验验证
为验证本文设计的闭环仿真系统,使用真实飞行数据与仿真数据进行对比。图7与图8所示为某飞行试验平台的90m飞行试验遥测数据。平台使用光纤捷联惯组作为惯性导航敏感器,使用差分GNSS与惯组输出进行组合导航,从而提供高精度的位置与速度信息。导航坐标系选取北天东坐标系,制导方法采用轨迹跟踪制导,离线装定目标位置和标准导引量,飞行过程中进行插值运算,获得实时导引量。图7为北、天、东三方向位置,图8为三方向速度。由图可见,本次最大飞行高度为89.81m,采用直上直下弹道,水平方向无横移,起飞漂移北向0.9m,东向0.7m,上升过程最大速度9.17m/s,下降过程最大速度7.58m/s,着陆速度1.00m/s。
图9和图10所示为本文设计仿真系统的闭环仿真结果,由图可得,运载器最大飞行高度90.88m,上升和下降最大速度分别为9.03m/s和8.67m/s,着陆速度0.82m/s。对比图7和图8,仿真弹道与真实飞行弹道保持一致。起飞阶段,仿真系统考虑了推力线偏移和伺服零位的影响,对真实飞行中的起飞漂移进行了良好复现。飞行过程中,仿真系统采用在陀螺和加速度计中加入零位偏置误差和零偏稳定性误差,模拟实际飞行中的惯组漂移,采用一阶马尔可夫过程近似差分GNSS接收机误差,仿真系统均满足了设计要求。
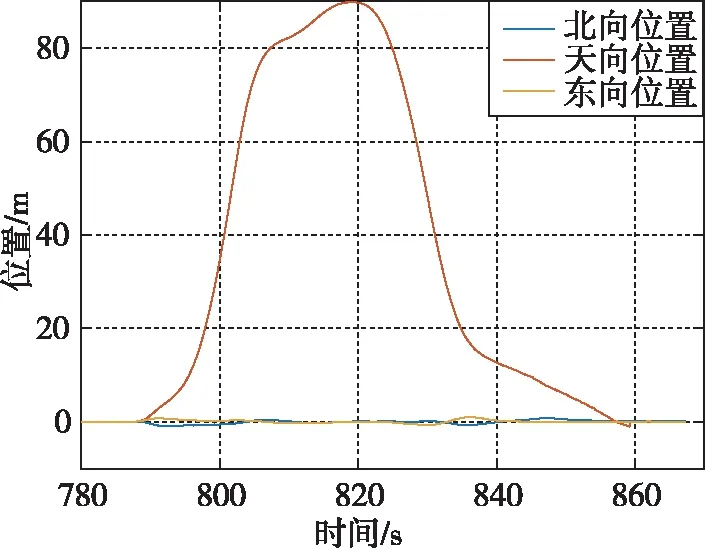
图7 真实飞行位置曲线Fig.7 Real flight position curve
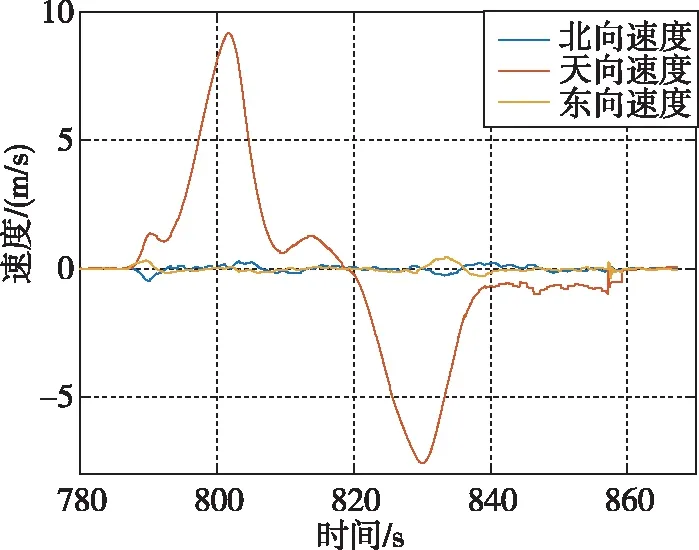
图8 真实飞行速度曲线Fig.8 Real flight velocity curve
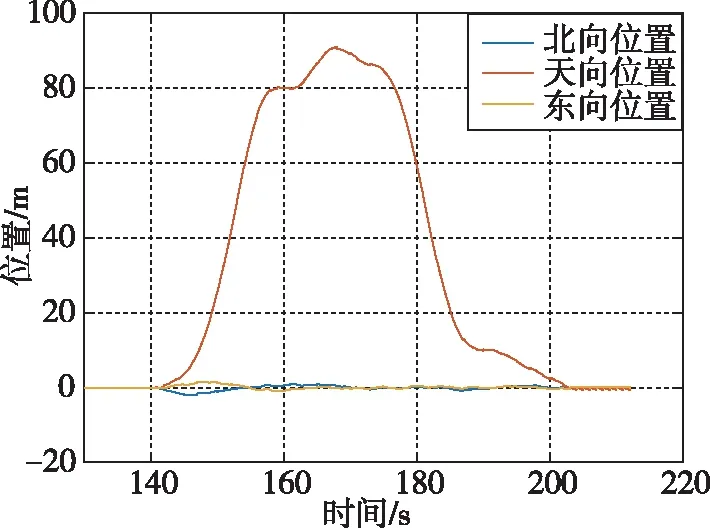
图9 仿真系统位置曲线Fig.9 Simulation system position curve
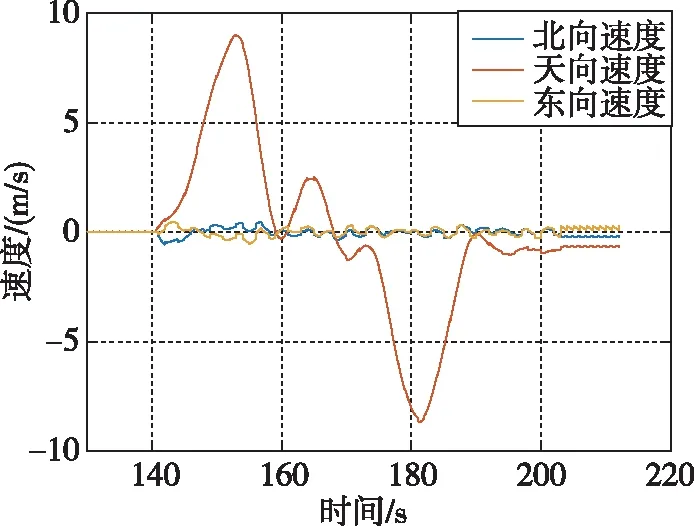
图10 仿真系统速度曲线Fig.10 Simulation system velocity curve
为进一步说明该套仿真系统的稳定性,考虑发动机推力偏差,即在仿真中加入2%的推力正偏差,仿真结果如图11和图12所示。
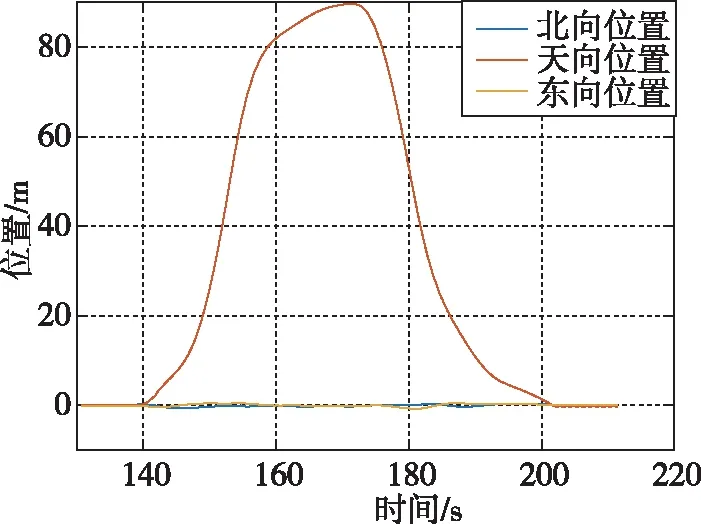
图11 仿真系统位置曲线Fig.11 Simulation system position curve
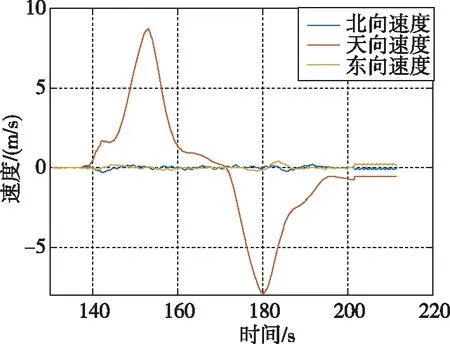
图12 仿真系统速度曲线Fig.12 Simulation system velocity curve
由于加入偏差后的推力值偏大,前期速度上升偏快,超出标称值,为了使速度跟踪标称值,上升段具有减速过程,最终上升段的最大速度也因此略低。在着陆段的缓速下降过程中,由于推力偏大,所以着陆速度比偏小。对上述特征量进行统计,如表1所示。
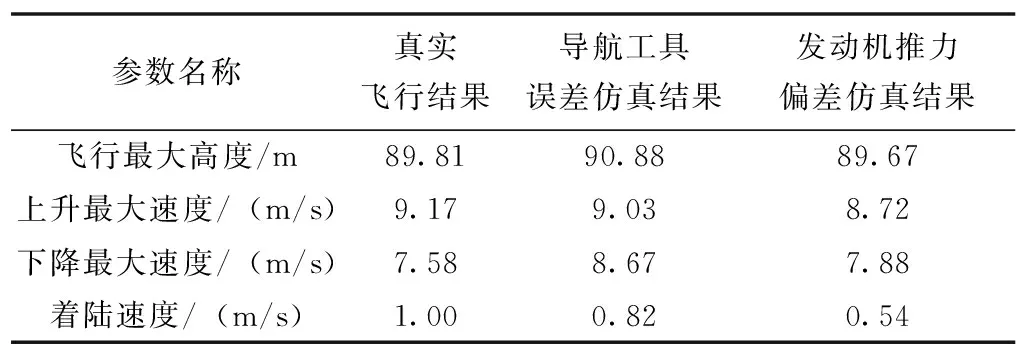
表1 仿真系统与真实飞行结果对比
综合以上结果可以看出,本文设计的闭环仿真系统设计合理,对干扰量的模拟贴近真实条件,使得仿真系统与真实飞行结果保持一致。利用该套仿真系统,能够在真实飞行前对设计的导航、制导及姿控等算法进行考核,有助于提前发现问题,降低风险,提高真实飞行成功率。
5 结 论
本文设计了一套基于STM32的可重复使用运载器闭环仿真系统。该套仿真系统能够用于可重复使用运载器的导航、制导及姿控等算法的验证工作。通过将仿真结果与真实飞行数据对比可知,该套平台具有较高的稳定性,能够较好地模拟真实飞行状态,并可有效缩短研制周期。