一种无引北三轴转台标定捷联惯组方法*
2022-06-11曹院
曹 院
(中国空空导弹研究院·洛阳·471009)
0 引 言
目前,工程中通常采用分立式标定方法对捷联惯组器件误差参数进行标定,该方法直接利用陀螺仪和加速度计的输出量进行计算。其基本原理是设计编排一组转台位置翻转序列,以地球自转角速度和重力加速度作为计算基准,依据建立的陀螺仪和加速度计误差模型,在转台不同的翻转位置上计算出捷联惯组各个轴向加速度计误差参数和陀螺仪零偏误差,而陀螺仪的标度因数误差和非正交性误差是通过转台在标称角速率旋转时的陀螺仪输出值与标称值比较求得。在中低精度捷联惯组器件的标定中,普遍采用的分立式标定方法是六位置翻转法,工程中还有采用十位置翻转法等,均是由于不同的测试需求,在六位置翻转法的基础上设计的。六位置翻转法需要转台为捷联惯组提供精确的方位基准和水平基准。使用水平仪等设备确定水平基准,操作较为简单,而确定方位基准必须对转台引北,工作量大、成本高,且后期需要定期校准,尤其是转台安装于密闭空间内,给引北带来了极大不便。为降低中低精度捷联惯组标定成本,在研究六位置翻转法的基础上,重新规划了标定流程,设计成十二位置三轴转台翻转标定测试方法。该方法首次采用十二位置翻转法,不依赖转台引北,也可标定出捷联惯组的24个器件误差参数。
1 捷联惯组误差数学模型
在仅考虑标度因数误差、非正交性误差和零偏误差的情况下,建立陀螺仪和加速度计的误差数学模型。
1.1 陀螺仪误差数学模型

(1)
式中,、、分别为、、三个轴向陀螺仪的输出值;、、分别为、、三个轴向陀螺仪的标度因数误差;、、、、、分别为、、三个轴向陀螺仪的非正交性误差;、、分别为、、三个轴向的角速度输入值;、、分别为、、三个轴向陀螺仪的零位误差。
1.2 加速度计误差数学模型
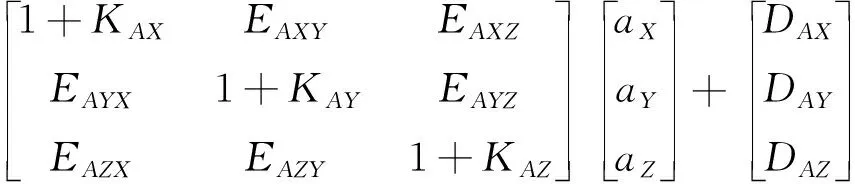
(2)
式中,、、分别为、、三个轴向加速度计的输出值;、、分别为、、三个轴向加速度计的标度因数误差;、、、、、分别为、、三个轴向加速度计的非正交性误差;、、分别为、、三个轴向的加速度输入值;、、分别为、、三个轴向加速度计的零位误差。
2 十二位置标定方法位置编排
对三轴转台引北的目的是精确标定陀螺仪的零偏误差,六位置翻转法需要精确知道捷联惯组在静态测试时陀螺仪的指向,才能扣除地球自转角速率在该轴向上的投影,这需要转台引北。为了达到转台不引北的目的,十二位置标定方法的设计思路是:通过设计合理的标定位置翻转序列,将转台方位旋转180°,使六位置翻转法每个静态测试位置上的处于水平面上的陀螺仪测试两次,以消除转台方位不准确对求解零偏误差的影响 。
假设三轴转台台面的水平度达到标定捷联惯组的要求,且粗测三轴转台相对于真实北向的方位角度为,误差角度为Δ,则转台的理论方位角度为+Δ,转台未引北时虽不能精准确定Δ,但Δ值是一小量,小于5°。如图1所示,位置1时轴和轴位于水平面内,标定前需要计算出轴指向与真实北向的角度。如图1所示,三轴转台在位置1、位置5和位置9进行动态测试和静态测试,其他位置进行静态测试。测试顺序为:将三轴转台翻转到位置1,启动捷联惯组,先动态测试,接着静态测试,完毕后将三轴转台翻转到位置2,静态测试,完毕后进行位置3静态测试,按图1翻转顺序依次进行,待十二位置静态测试后,关闭捷联惯组,保存每个测试位置的陀螺仪和加速度计输出值。
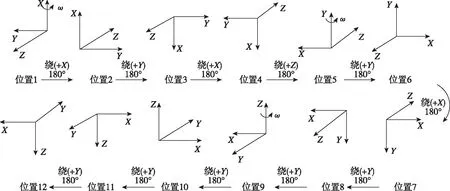
图1 十二位置标定方法位置编排Fig.1 Position arrangement of twelve-position calibration method
十二位置翻转法比六位置翻转法多6个静态测试,会增大标定时间成本,但可节省转台引北的成本,尤其是在标定转台处在不易引北的环境中,十二位置翻转法的优势更加突出。
3 陀螺仪误差系数标定算法
3.1 陀螺仪的标度因数误差和非正交性误差
以求取轴向陀螺仪的标度因数与非正交性误差为例。在位置1动态测试中,使转台绕轴以一定转速分别正向和逆向旋转,转速点一般在陀螺仪量程内均匀选择。为避免动态效应,测试时间内转台应匀速旋转。采用整圈测试法,这样可以保证位于水平面的陀螺仪轴向上的地球自转角速度分量在转台旋转一圈后被抵消掉。
在位置1的动态测试中,绕轴正向旋转时的轴角速度输出值为

(3)
式中,为当地地理纬度;为转台旋转角速度;为地球自转角速度。
将式(3)代入式(1)中,可得
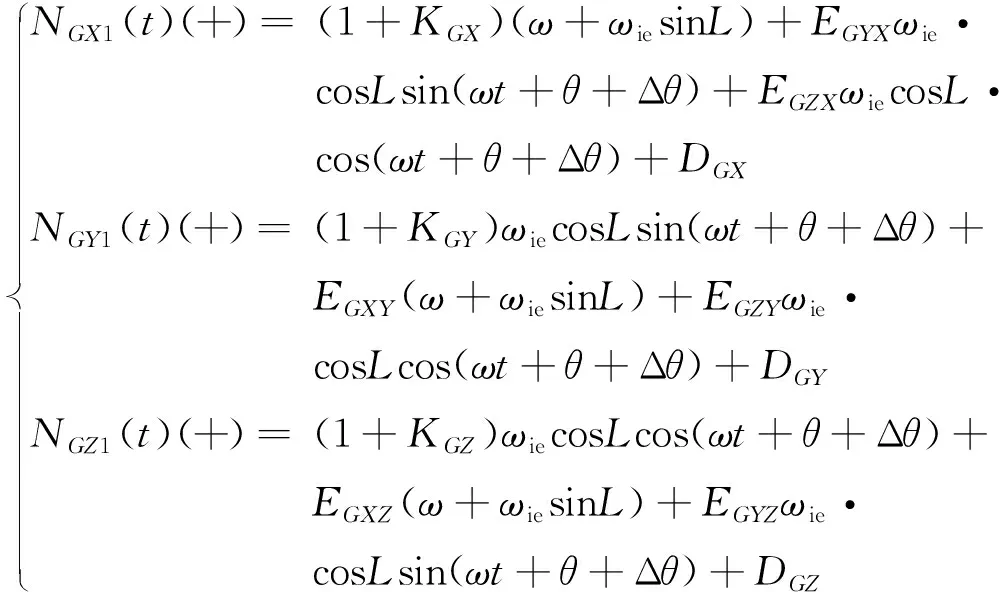
(4)
式中,1()(+)、1()(+)、1()(+)分别为转台在位置1以角速度正向旋转时、、三个陀螺仪轴向的输出值。
在转台正向旋转一圈后,对三个轴向陀螺仪的输出值求和,可得
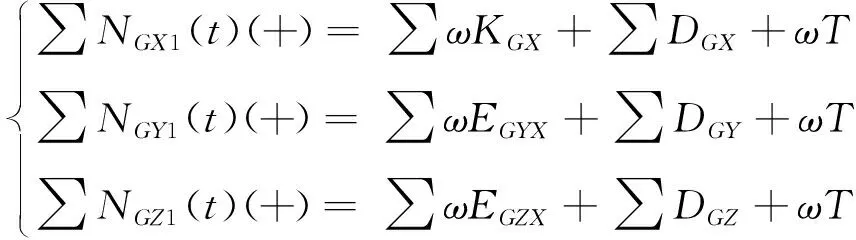
(5)
式中,为转台旋转一圈的时间。
同理,转台以角速度负向旋转一圈,对三个轴向陀螺仪的输出值求和,可得
(6)
式中,1()(-)、1()(-)、1()(-)分别为转台在位置1以角速度负向旋转时、、三个轴向陀螺仪的输出值。
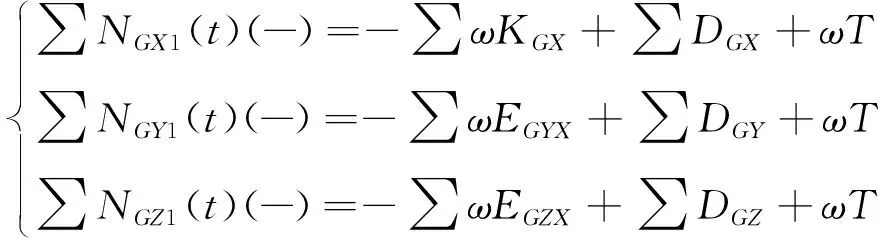
式(5)减式(6),可得
(7)
同理,对位置5和位置9动态测试的陀螺仪输出值做同样推导,可得

(8)
由式(7)和式(8)可求得在转速下三个轴向陀螺仪的标度因数误差和非正交性误差。通过计算不同转速点下的标度因数误差和非正交性误差,利用最小二乘法可计算出三个轴向陀螺仪的标度因数误差和非正交性误差。
3.2 陀螺仪的零偏误差
利用位置1~位置12静态测试的陀螺仪的输出可求得陀螺仪的零偏误差。
通过式(1)和式(3),以及地球自转角速度在、、轴向上的分量,可求得位置1时三个轴向陀螺仪的输出为
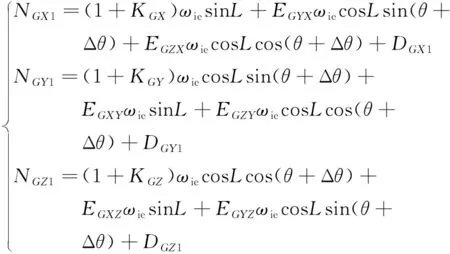
(9)
同理,可求得位置2时三个轴向陀螺仪的输出为
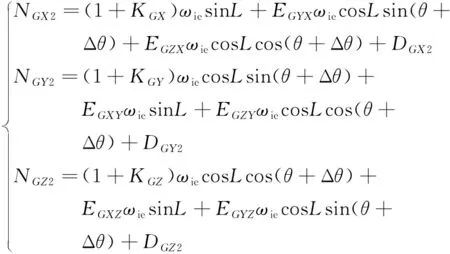
(10)
同理,可求得位置3时三个轴向陀螺仪的输出为
(11)
同理,可求得位置4时三个轴向陀螺仪的输出为
(12)
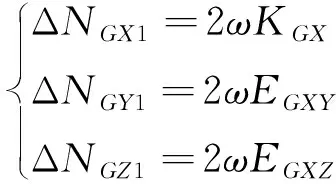
由式(9)~式(12)相加,计算可得位置1~位置4三个轴向陀螺仪的零偏误差均值为
(13)
同理,可求得位置5~位置8和位置9~位置12的陀螺仪零偏误差均值,则三个轴向陀螺仪的零偏误差为
(14)
4 加速度计误差系数标定算法
在静态测试中,垂直方向的加速度计受到重力影响,可根据输出值计算该轴向加速度计的标度因数误差和零偏误差;水平方向的加速度计主要受到非正交性误差的影响,可根据输出值计算非正交性误差。
由式(2)和图1,可计算位置1和位置2时三个轴向加速度计的输出为
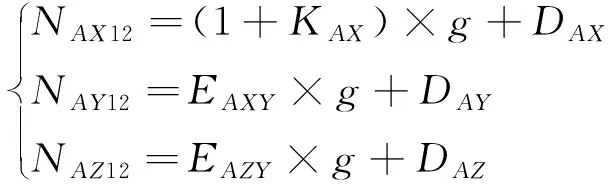
(15)
式中,为当地重力加速度。
同理,可计算位置3和位置4时三个轴向加速度计的输出为
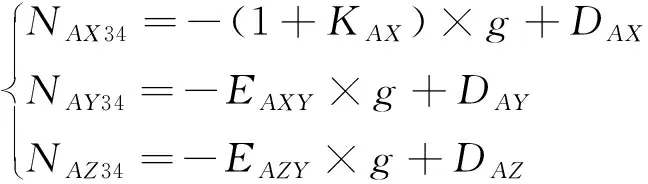
(16)
由式(15)和式(16)可计算得
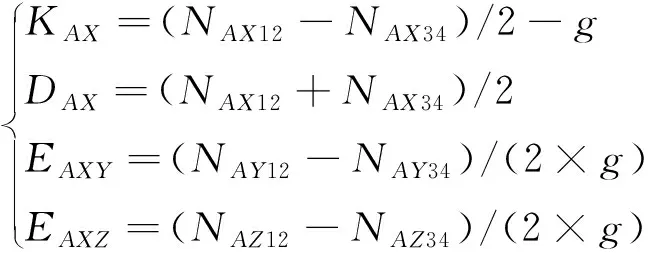
(17)
同理,利用位置5~位置8和位置9~位置12的加速度计输出值可求得其余加速度计误差,则三个轴向加速度计的标度因数误差、非正交性误差和零偏误差为
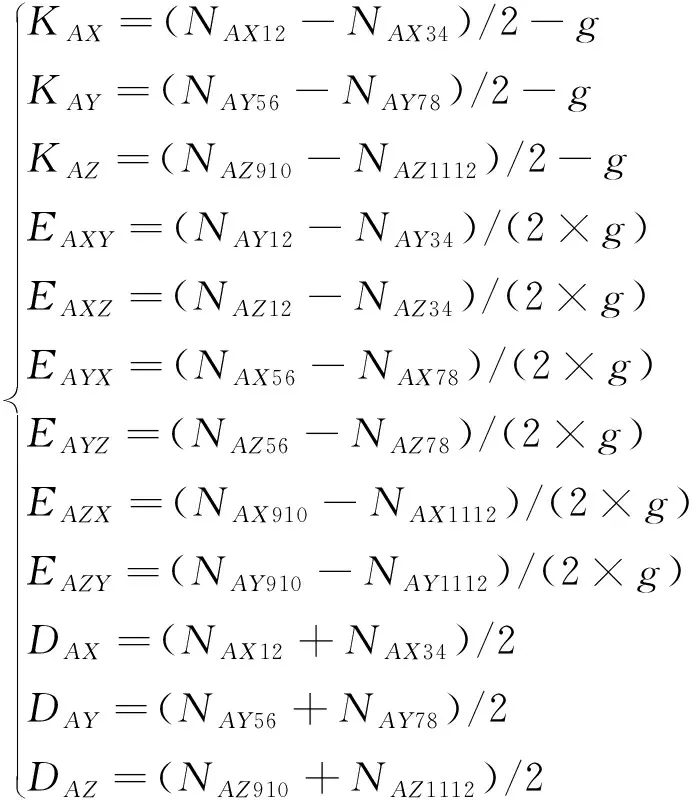
(18)
5 试验验证
试验用的捷联惯组由三轴光纤陀螺仪组合和三轴石英加速度计组合构成,是已工程应用的中精度捷联惯组,其试验结果具有普遍性。光纤陀螺仪的标度因数为7.8(″)/p(p表示脉冲,这里表示每个陀螺仪输出脉冲代表的角度值),石英加速度计的标度因数为0.01(m/s)/p。使用高精度三轴转台进行标定试验验证,如图2所示。
图2 高精度三轴转台Fig.2 High precision three axis turntable
首先,采用六位置翻转标定方法对捷联惯组进行标定,记录标定结果;然后,利用本文设计的十二位置翻转标定方法对捷联惯组再次标定,记录标定结果。对比两次标定的结果,如表1所示,表中为当地重力加速度。
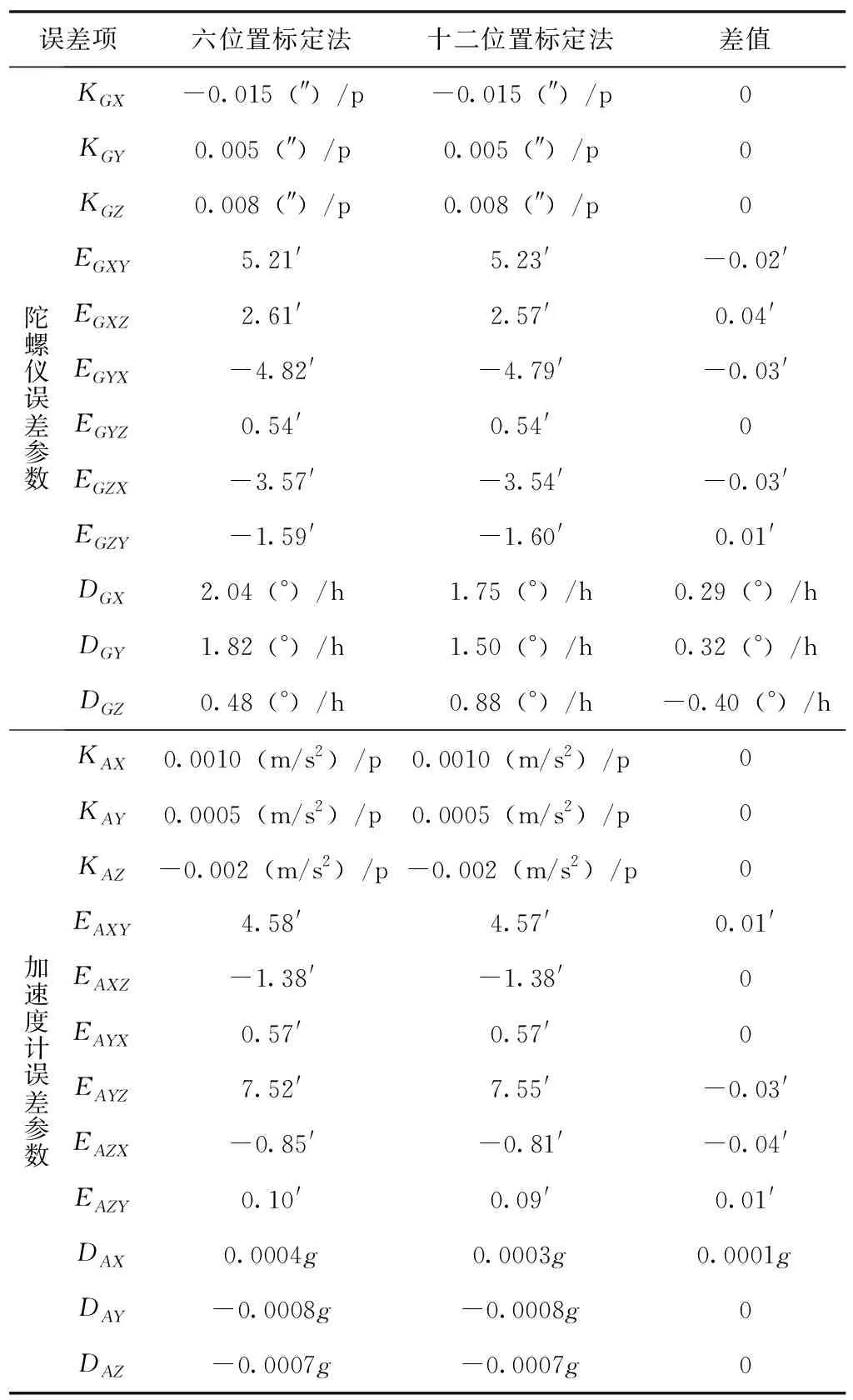
表1 六位置与十二位置标定结果对比表
从表1的对比结果可以看出,采用十二位置标定方法与六位置标定方法对同一捷联惯组的标定结果一致,说明在三轴转台无引北的情况下,本文设计的十二位置标定方法仍能准确标定出捷联惯组的24个误差参数。
6 结 论
本文设计了在三轴转台无引北情况下的十二位置捷联惯组标定方法,通过在高精度三轴转台上对同一中精度捷联惯组的标定结果进行对比,可以看出,该方法可替代六位置标定方法,降低了中精度捷联惯组标定设备的研制成本,对中精度捷联惯组的标定具有一定的参考价值。