基于VOF方法的某SUV车型涉水性能仿真研究
2022-06-10宋名洋
宋名洋
(东南(福建)汽车工业有限公司,福州 350119)
车辆涉水安全一直是汽车运行中的一个关键问题。一方面,发动机和底盘在涉水过程中可能受到水的影响,导致性能失效和损坏,如发动机舱中进气口位置如果有水分浸入会直接影响车辆的进气系统,机舱中的电子系统和电池单元在涉水过程中也很容易受水浸危害。另一方面,涉水过程中溅起的水也会对车身关键部位的洁净度产生一定的负面影响,如溅起的水覆盖挡风玻璃会妨碍驾驶员的视野,造成行车危险。车身的涉水性能与车身下部和底盘的构造以及机舱关键部件的布置密切相关。通过对车身下半部分的造型、底盘和机舱进行局部修改,对提高车辆涉水性能有很大的帮助,但同时由于车身造型和机舱的敏感性,也会影响其他性能,比如车身或发动机进气等空气动力学性能也会受到影响。因此,应进行综合分析,以提高车辆涉水性能。
国内外许多学者利用各种技术手段针对车辆涉水问题进行研究。KHAPANE等提出了涉水水位预测理论。通过试验与仿真的对比分析,验证了仿真的准确性,提出了涉水水流进入机舱的基本模式。MAKANA等建立了完整的车辆涉水模拟过程,分析了几种两相流仿真模型的优缺点,并利用CFD仿真探讨了机舱内部布局变化对涉水安全的影响。KHAPANE等提出了一种非经典的模拟策略来研究深涉水的过程。TANAKA等建立了考虑多体动力学影响的涉水仿真过程。郑鑫等对汽车涉水时防火墙的渗水现象进行仿真,计算出涉水过程中汽车各零部件上的压力分布及单元内的相体积分数,并在发动机底部添加一种保护板,有效地抑制了底部水流对防火墙的冲击。但以上文献未对水流进入机舱中的水位动态变化过程进行详细研究并寻找规律,本文首先研究从浅水到深水阶段的舱内水位及流态跃变过程,总结其规律性,然后针对性实施优化方案,为车型的涉水性能开发和优化提供理论依据。
1 数值仿真模型
对于涉水过程中不同类型的介质在空间中的共存和相互作用问题,通常采用相的概念来描述流体区域内不同介质之间的差异。通过一定的交互界面来明确捕捉或交互几个不同的相位状态。STARCCM+提供多种两相流体模型,其中连续相模型为流体体积VOF模型和液膜模型。VOF模型适用于在数值网格上仿真几种非混相流体的流动,解决混合气相之间的界面问题,不需要对相位间的相互作用进行额外的建模,该模型假设所有相位共享速度、压力和温度场成为离散化误差。对于车辆涉水仿真过程,需要对大面积的水域进行仿真分析,重点是通过仿真确定水流位置,准确捕捉气相界面。因此,本文采用VOF方法进行仿真。
VOF的方程为:
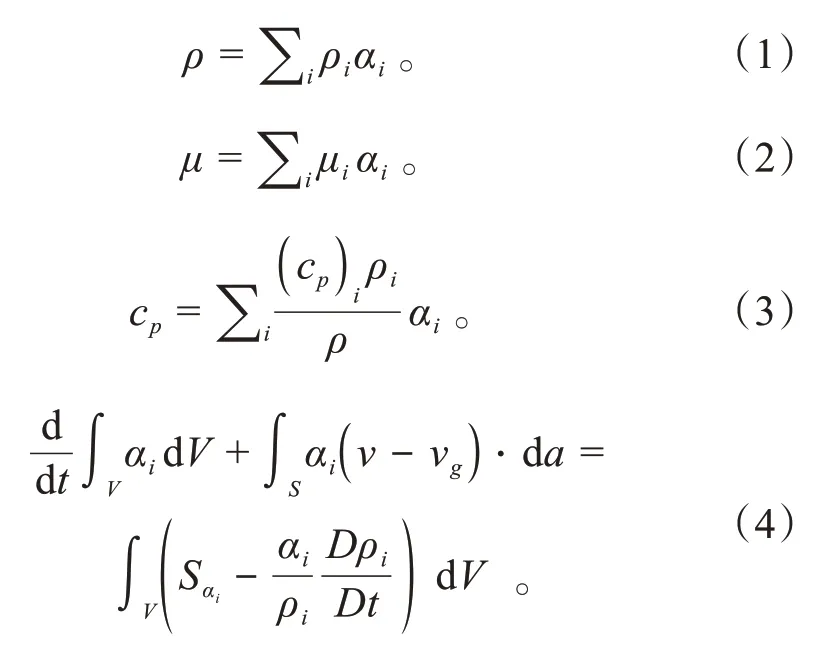
式中:α为体积分数;ρ、μ和(c )分别为第相的密度、分子粘度和比热;S为第相的源;Dρ Dt为ρ相的物质导数或拉格朗日导数。
在VOF模型仿真过程中,不仅涉及和气相界面的精确捕获问题,还要使计算稳定。涉水仿真通常是具有大量网格的非定常解,在解决精度和计算稳定性之间的平衡方面,STAR-CCM+提供了Courant数范围、角系数和锐化因子等可调参数,采用对流离散化方案,解决精度与计算稳定性之间的平衡问题。
HRIC程序方程为:
式中:为局部库朗特数;ξ为网格归一化变量;ξ为网格中心点归一化变量;ξ*计算值可根据局部库朗特数修正;和Cu 默认值分别为0.5和1,引入目的是基于库朗特数的HRIC和UD方案的混合控制。
2 仿真过程
2.1 几何模型准备
本文选择某款SUV来建立涉水仿真模型。将整车CAD模型导入STAR-CCM+,由于车身的某些部位对水位更敏感,所以对敏感部位的体网格加密,体网格达到6 400万个。整车体网格和车身网格加密如图1~2所示。
图1 车身体网格纵截面剖视图
2.2 初始条件和边界条件建立
本文采用隐式非定常方法求解瞬态流动状况,时间步为0.001 s,最大内部迭代为20步,最大物理时间为5.0 s;物理模型选取-湍流模型,激活-双层模型。模型迭代历程36 h左右,残差曲线收敛稳定后均小于1×10。如前所述,HRIC高精度解的应用对求解过程的精度和计算成本有很大影响,所以通过测量网格的大小和计算域的速度等参数来选择合适的Courant数集的范围。
为了仿真车辆涉水的运动过程,在STARCCM+中设置了域运动和局部旋转的运动状态。计算域的运动设定为相对于车辆坐标系的水平运动,车轮的旋转定义为固定角速度相对于轮轴的旋转。角速度的值与计算域中线速度的值相匹配。在边界条件设置中,入口位置与水平水面域相切,因此水相和气相的混合物设置在入口位置。通过初始条件和边界条件的定义,使入口水相比保持不变。由于出口位置远离水域,不影响水位分析,所以出口位置边界上设定为单相不可压缩空气。此外,为了实现整车与地面和侧面的相对运动,在地面和侧面设置与域运动方向相反的相对速度来仿真整车的过程。
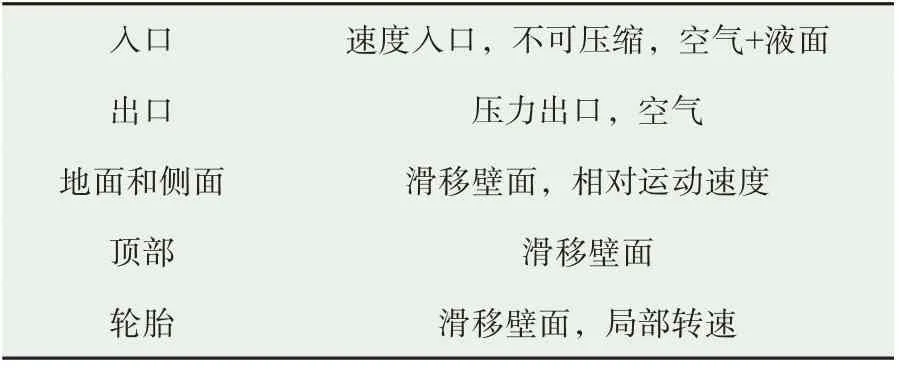
表1 涉水仿真边界条件
3 仿真条件
在现实中,车辆涉水的情况是随机的。不同水位条件下的涉水性能和水流影响方式存在较大差异,所以需要建立多种涉水水位仿真。
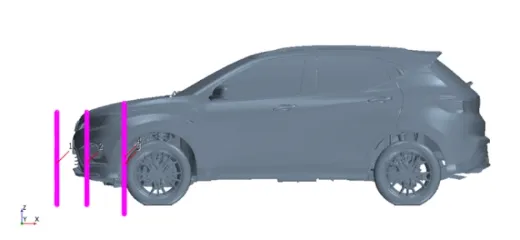
图4 水位监测装置位置(y视图)

图5 水位监测装置位置(z视图)
水位高度值是涉水仿真的重要评价指标。选择机舱向敏感位置进行水位高度监测。在涉水试验中,布置水位传感器监测测量水位,并与仿真结果进行比较。对汽车进气部位附近、电控单元位置、冷凝器前端和机舱中心的水位高度进行监控的不同视图,如图3~5所示。
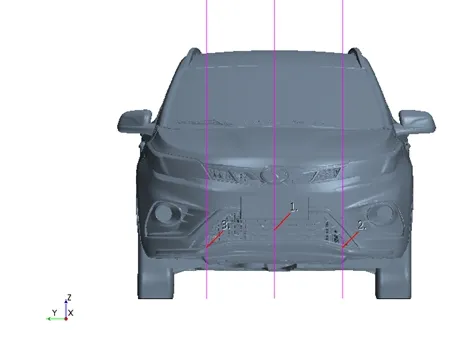
图3 水位监测装置位置(x视图)
4 涉水仿真
基于2.2节仿真模型建立,初始工况中涉水水位高度设定为0.25 m,车速为5 m/s。仿真中采用与试验相同的涉水池参数,可涉水长度为100 m,全长为130 m,宽度为4.4 m,最大可涉水深度为1 m,两端坡度均为8%。涉水过程仿真如图6所示。
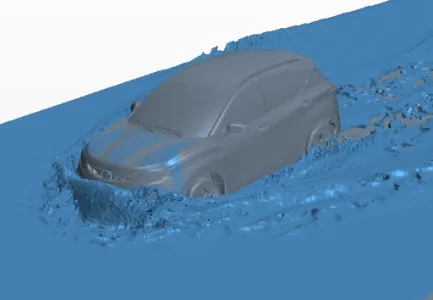
图6 涉水仿真
在初始仿真模型中,SUV以5 m/s的速度在0~0.25 m的水面上入坡行驶的过程。起初车辆与水面保持一定的距离,车辆行驶1 s后,轮胎首先与水接触,接触初始状态如图7所示。
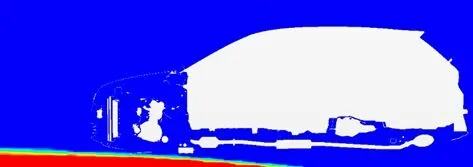
图7 水体积分数标量图(水面高度=0.25 m,y=0,t=1.0 s)
本文标量场景中的水体积分数均是通过图8中所示的灰度颜色进行区分。

图8 标量比例图
入水1.6 s时,车辆中截面(=0)的水体积分数,以及车身各区域的水体积分数的分布状态,如图9所示。
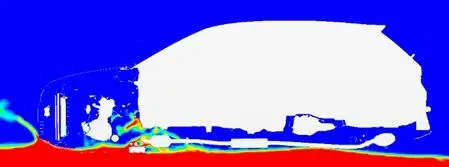
图9 水体积分数标量(水面高度=0.25 m,y=0,t=1.6 s)
在0~0.6 s的入水过程中,车辆浸水深度从0水位逐渐过渡到0.25 m,此时,随着涉水水位的逐渐加深,水流出现最初始的涉水扰动,进入汽车底部的水从前地板前缘,顺着防火墙回流到发动机舱。继续涉水至1.6 s时,由于涉水水位维持在0.25 m,车辆没有进入更深的水域,所以仅有较少的水在格栅周围,冷凝器不受水的影响。相较之下,在入水过程中,由于存在涉水扰动和水回流问题,水会飞溅或浸湿转向系统甚至制动系统,存在安全隐患。
车辆在2.2 s和2.4 s时,=-0.4 m截面(分析电池单元的水浸情况)的水体积分数的标量,如图10~11所示。由于前地板前缘比截面=0的位置更靠前,水流量会更早回流至机舱。在2.2 s时刻,水流被防火墙和地板的几何形状阻挡,不会产生向上的冲击水流。因此,水的流入和冲击不会对发动机ECU的安全造成影响。此外,由于冷凝器两侧缺少遮挡,格栅位置的入射流顺着两侧空隙进入机舱。由图10~11可知,从格栅位置进入的水流不断向后飞溅,几乎达到空气滤清器、电池和电控单元的位置,所以该区域在涉水过程中存在风险。
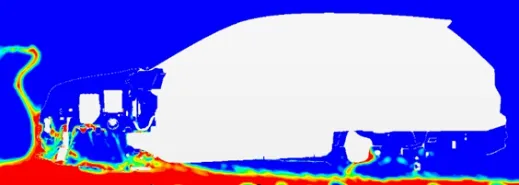
图10 水体积分数的标量(水面高度=0.25 m,y=-0.4,t=2.2 s)
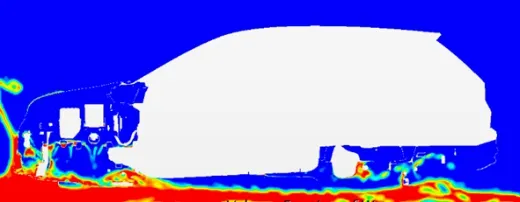
图11 水体积分数的标量(水面高度=0.25 m,y=-0.4,t=2.6 s)
车辆在4.2 s和5 s时的平稳段涉水状态,外部水溅高度维持在0.8 m左右,如图12~13所示。在前地板前缘的入射流型变化不大;同时,由于外部水位稳定在0.25 m,从格栅位置来的水流绕过冷凝器,流经空气滤清器和电池的安装位置后出现周期性往复波动,但未对空气滤清器和电池的安装位置造成不良影响。
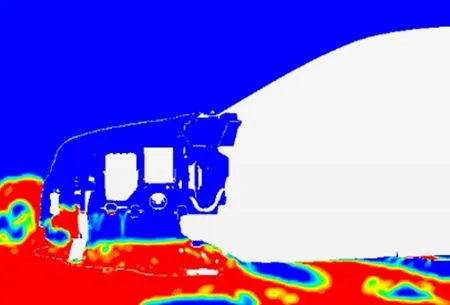
图12 水体积分数标量(水面高度=0.25 m,y=-0.4,t=4.2 s)
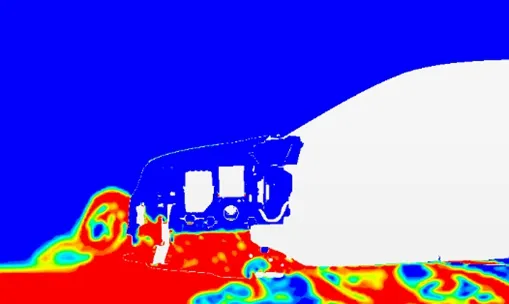
图13 水体积分数标量(水面高度=0.25 m,y=-0.4,t=5.0 s)
外部水位高度线的监测结果如图14所示,由图可知涉水时间和水位高度相对应的变化情况。
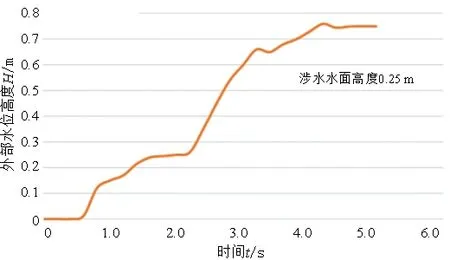
图14 外部水位高度线监测(水面高度=0.25 m)
综上所述,当车辆以5 m/s的速度匀速行驶在0.25 m水平时,其涉水大致可分为3个环节:(1)涉水初期,车辆涉水深度不深,格栅位置的水流未达到危险高度,唯一的影响是从前地板前缘位置的回流现象。(2)涉水过程,在2.2 s前后,车辆由浅到深的涉水环节,格栅位置开始有大量的高水流,从格栅位置进入的水流不断向后飞溅并造成一定影响。(3)涉水稳定段,机舱内的水位最终定位在大约0.35 m到0.45 m的范围内,且不会造成不良影响。
5 涉水试验
为验证仿真模型的有效性,以及后续对不同水位的分析研究,对SUV进行整车涉水试验。在试验中使用等高度水位的低洼水道,排水系统可以调节水位。其涉水速度和深度均与初始仿真模型设定相同,即车辆从无水路面先以匀速行驶,并在整个入口、涉水和光滑的路面上保持其速度。初始条件的涉水过程如图15所示。

图15 初始条件的涉水试验
测试结果表明:涉水初期,前地板前缘位置同样存在水回流现象,浸湿转向系统和部分制动系统,与涉水仿真的表现一致。涉水过程中出现大量即将进入发动机舱的水,进气口位置、电池位置、空气滤清器等安装位置有水渍,表明出现了浸水和溅水现象;但机舱的水位线在0.43 m,说明涉水稳定阶段时的水位高度与仿真基本相当。
6 不同涉水高度的研究
根据以上分析,通过设定整个涉水过程的不同水位来探索其他涉水过程的模式。
6.1 研究不同的水位高度
考虑到不同的涉水高度会对具体的涉水方式产生不同的影响,从而直接影响防水设计。因此,有必要进一步研究不同水位下的涉水问题。为符合实际情况,选取0.15 m和0.35 m两种水位高度进行对比分析。
不同水位高度下涉水前期的表现,如图16~17所示,选取=0截面的水体积分数进行观测,发现水位越高,对格栅区域的影响越早。当水面高度为0.35 m时,冷凝器前端在涉水初期便充满了水,且水流在通过冷凝器后形成了回流。涉水初期,3种水位高度的差异主要集中在前格栅位置的水位高度上,而前地板前缘位置的差异不明显。
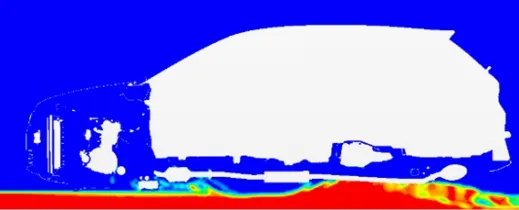
图16 水体积分数标量(水面高度=0.15 m,y=0,t=1.6 s)
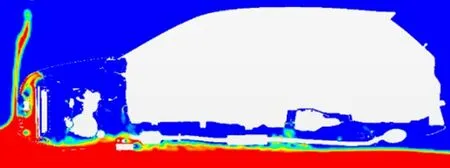
图17 水体积分数标量(水面高度=0.35 m,y=0,t=1.6 s)
图18 ~19显示了不同水位高度下的涉水稳定阶段的表现。在低水位时,前保险杠的水位不会达到格栅的高度,水浸的位置主要集中在前地板前缘的水流入射上,入射流甚至可以到达冷凝器安装支架的位置。在高水位时,水与前保险杠的相互作用,使水位更高,并流经格栅位置进入发动机舱,由于机舱内储存了大量的水,因此机舱内的水位总是比外部高出0.1 m左右。在水面高度为0.35 m时,与前格栅处的水位相比,前地板前缘处的水位影响较小。
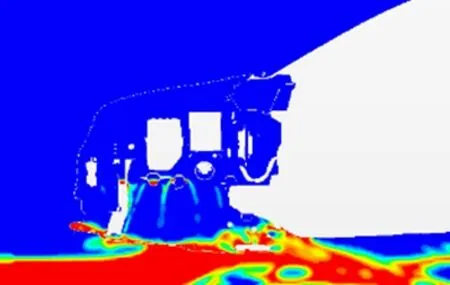
图18 水体积分数标量(水面高度=0.15 m,y=0,t=3.6 s)
在此基础上,利用水位量化曲线对不同水位下的入流模型进行评价。
图20显示了在3种水位高度的涉水条件下,车辆前保险杠区域的监测单元5 s内水位高度的比较。

图2 计算域加密方案
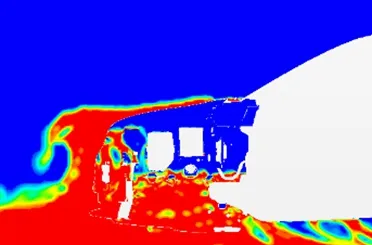
图19 水体积分数标量(水面高度=0.35 m,y=0,t=3.6 s)
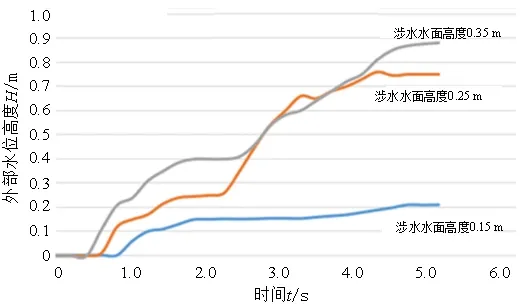
图20 前保险杠区域水位高度监测(0.15 m/0.25 m/0.35 m水面高度)
由图20可知,在整个水位上升过程中,保险杠前主要有两个水位上升阶段。第1阶段是在0.6~1.8 s之间,这时随着涉水水位的逐渐加深,监测点的水位高度几乎线性增加;第2阶段在2.2~4.2 s之间,在这个阶段水流撞击车辆而飞溅,导致水位急剧上升和波动。当4.5 s左右时,水位基本保持不变。3种水位高度下的水位监测高度不相同,但在0.25 m和0.35 m条件下的第2次上升更剧烈,跳跃幅度更大,所以在较高水位下,更需注意涉水安全性。
冷凝器前的监测水位高度,如图21所示,与前保险杠位置的监测值有明显差异。
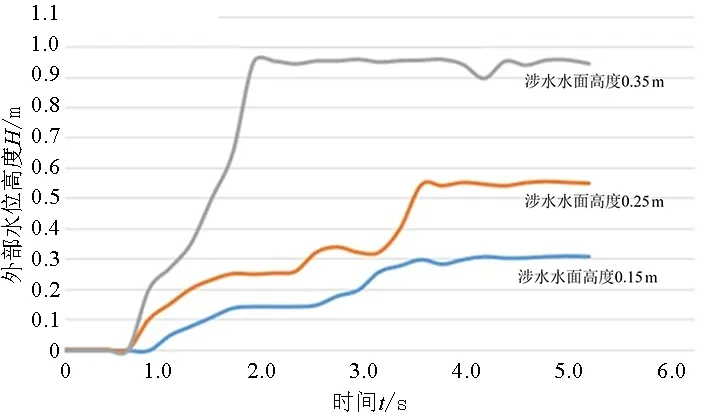
图21 冷凝器区域水位高度监测(0.15 m/0.25 m/0.35 m水面高度)
由图21可知,在水面高度为0.35 m时,冷凝器前端中部水位在2 s内跳升至最大值,然后几乎不再变化。但在0.25 m和0.15 m高度时,冷凝器前端的水位变化规律差异不大,经过两级跳变后仍保持稳定。
为研究涉水对进气口、空气滤清器、蓄电池及电控装置安全的影响,在防火墙左前区域设置监测点来监测实时水位。该位置的水位高度变化曲线,如图22所示。
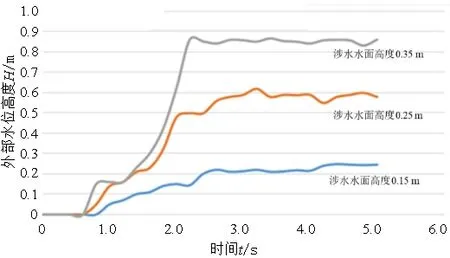
图22 防火墙左侧区域水位高度监测(0.15 m/0.25 m/0.35 m水面高度)
由图22可知,无论水位高低,防火墙附近的水位都比其他位置提前达到最大涉水水位。在车型开发中,可以考虑改变发动机舱的部分布置,降低或避免涉水过程的回流跳跃对电池、电控、甚至进气口的影响。
综上所述,前保险杠飞溅水位存在两级跳跃上升的现象,冷凝器前的水位随前保险杠位置的水位变化而变化。在中低水位时也有两个阶段;在对防火墙水位进行监测时发现,由于前地板前缘出现回流,水流会提前跳跃,并在一段时间内影响冷凝器附近的水位。
6.2 优化方案
针对以上涉水风险,当水位较高时,如果能避免水位达到最大水位前的跳跃水流,将在一定程度上保证机舱的涉水安全,所以本文提出以下优化方案。
在冷凝器左侧添加小块前挡板,阻止水流冲击,如图23所示,从而防止水溅到进气口附近,并继续向后飞溅到电池或电气控制单元,同时在地板前缘添加伸长的襟翼,形成前缘挡板,降低水回流现象,如图24所示。

图23 方案一:冷凝器左侧添加挡板
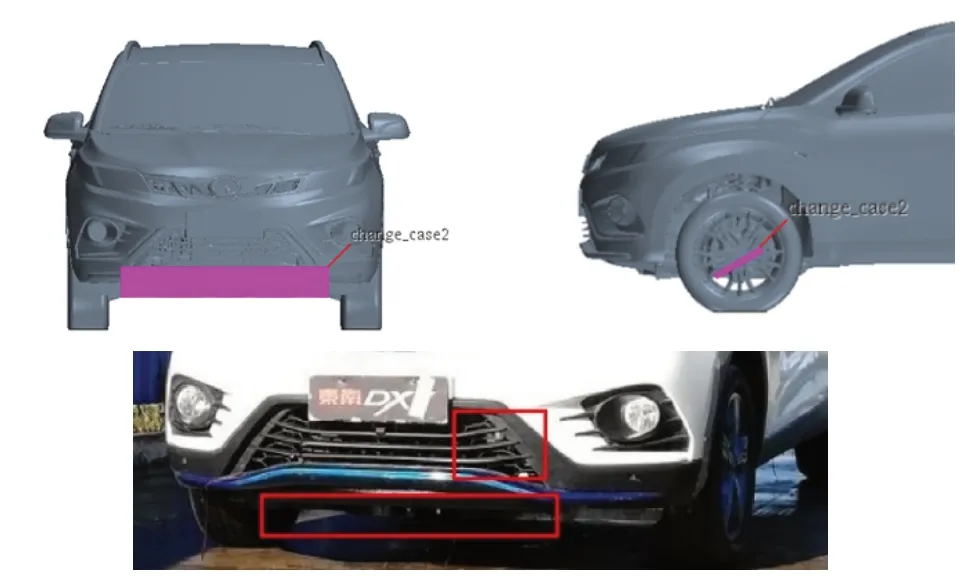
图24 方案二:前地板前缘增加挡板及试验车辆
根据上述优化方案,采用基准涉水高度0.25 m,对优化方案的涉水防护效果进行仿真和试验确认。
优化方案在机舱左侧位置0.22 s时的结果对比,如图25~26所示。由图可知,增加冷凝器侧挡板后,从格栅进入机舱的水流冲击明显降低,证明挡板的有效性。
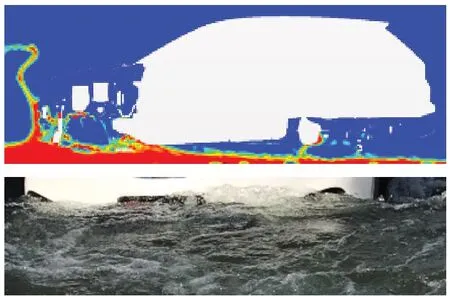
图25 原始方案的水体积分数的标量(水面高度=0.25 m,y=-0.44,t=2.2 s)
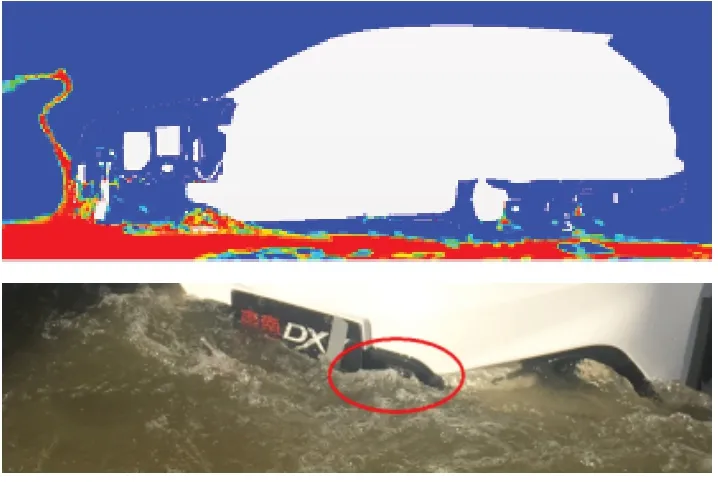
图26 优化方案的水体积分数的标量(水面高度=0.25 m,y=-0.4,t=2.2 s)
车辆涉入水中5 s时,发动机舱左侧位置的水位标量,如图27~28所示。与初始状态相比,尽管格栅前方水位很高,并不断涌进机舱,但冷凝器挡板和前地板前缘挡板使水流迅速流过机舱,降低了冷凝器前后的水位。
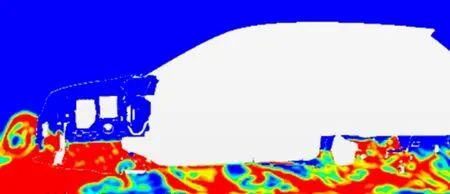
图27 原始方案的水体积分数的标量(水面高度=0.25 m,y=-0.4,t=5 s)
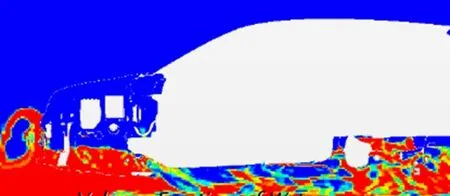
图28 优化方案的水体积分数的标量(水面高度=0.25 m,y=-0.4,t=5 s)
优化方案与原始方案的实时水位对比曲线,如图29所示。在1.3 s左右,防火墙的水位高度开始较原始模型发生变化,且水位高度始终低于原始模型。这说明了增加的挡板在保证涉水安全方面是有效的。
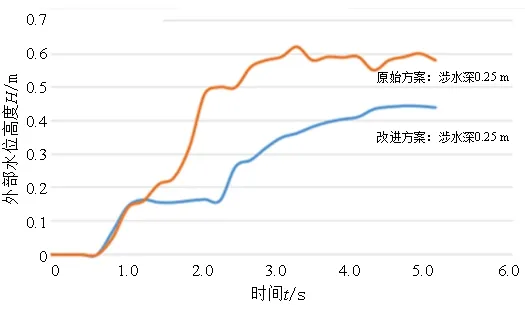
图29 防火墙水位高度监测值(优化方案与初始方案对比)
修改后的机舱左侧电池单元的水位与原始水位高度差值,如图30所示。挡板作用效果最明显的时间段出现在2.2 s处。此时,车辆正处于从最初的涉水阶段向稳定阶段过渡的中间阶段,挡板弱化了第2阶段跳跃引起的高水位冲击,有利于后期稳定阶段涉水过程的安全。
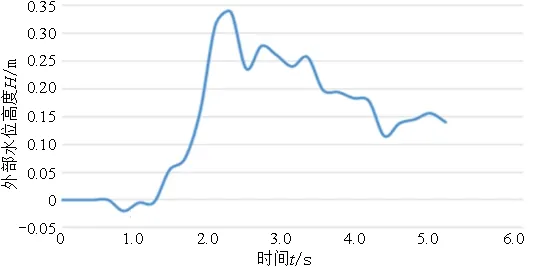
图30 原始方案与修改方案的水位差
需要说明的是,添加冷凝器左侧挡板会略微降低冷却热害性能,已实施整车冷却热害测试,对发动机水温的影响在0.8℃,满足SPEC值要求,属于可接受范围。
7 结论
基于VOF方法建立整车涉水仿真模型,并对SUV涉水过程进行精确仿真。通过仿真和试验结果的对比,确认了仿真模型的有效性,查找车辆涉水过程中存在的不足和安全隐患。
设置多种水位高度工况,探讨各工况下车辆涉水工况的异同。结果表明,水位从浅水到深水有两阶段的跃变过程,但跳跃细节因涉水高度的不同而有差异。
对结果进行分析后发现,在发动机舱左侧位置的电池单元和电控单元的安装位置存在涉水安全隐患。通过在冷凝器左侧和前地板前缘增加挡板,使水位在第2次跳跃时,把溅起的水花挡在后面。结果表明,在挡板的作用下,后向辐射水流明显减小,与初始模型相比,危险位置的流量在第2跳期间下降幅度最大。
