水下机器人集群通信系统设计及实验分析
2022-06-10续丹余雷胡桥冯兴龙陆涛
近年来,海洋机器人集群成为新型海洋装备的发展趋势与新型作战模式
,并在海洋资源探测、海上救援以及水下考古等方面有着巨大的应用前景
。推动水下机器人集群协同作业的关键技术主要在于解决水下机器人集群节点间快速稳定通信技术难题。
对比传统的陆地上的集群通信方式
,水下通信条件更加严苛,陆地上的无线电磁波等无线通信方式在水下衰减较为严重,故无线电磁波水下基本不可能实现。目前,水下无线通信方式主要分为水下声场通信、水下光通信以及水下电场通信
,其中水下声通信是利用声波在水里传播实现通信
。但还存在着传输速率低、带竞有限;容易受水质、水温、水压和水下噪声的影响形成多路径干扰信号和盲区等缺陷;水下光通信包括水下可见光通信、水下不可见光通信,以往研究表明,由于这种技术受水下环境干扰严重,使得水下光通信技术在一定程度上受到制约
。
患儿,男,年龄21 d。足月、平产,出生体质量3 200 g。因出生当日使用热水袋保暖,热水渗漏烫伤右上肢、右侧腰、背、髋部与右大腿上外侧,于伤后第3周转入。入院时体检:体温36.5℃,心率143次/min,意识清楚,反应良好;尚有约6% Ⅲ度创面未愈,其中右肘后创面约1%,右侧腰、背、髋部与右大腿上外侧约5%。创面黑、褐色痂壳覆着,已出现溶痂,损伤深度达皮下(图1A)。血、尿、大便常规及生化检查无明显异常。入院诊断:新生儿烫伤后残留创面(6%)、Ⅲ度。
李大头带着我,到不远处的一家劳保店,买了一床被子。粗糙的绿布面,里面的棉絮一团一团的,硌手,是垃圾棉。可我都这样了,哪还有资格挑肥拣瘦,有个地方栖身就不错了。
近年来,多个国内外团队利用电场本身所具有的高效通信能力,开始研究将水下仿生电场探测系统应用于水下多节点通信之中。1971年,Schultz详细介绍了水下电场通信的基本原理,并且将水下电场通信原理应用于潜水员,制作了一个水下通信装置
;2007年,Joe等采用水下电场原理进行了水下近场数字通信设备的研究,提出一种新型的电极板布局结构,能够最大化提高水下电场通信的通信距离
;2009年,谭涛等基于FSK调制解调方案,采用AT89S52等芯片进行了潜水员水下近距离电场通信电路的研制,初步设计实现了一种近距离水下语音传输电路
。2010年,李斌等在理论分析的基础上,设计了一套基于数字信号处理器(DSP)的水下电场通信系统,实现了1 m以内水下电场通信
;近年来,谢广明课题组设计实现了一款水下电场通信系统,并将该系统搭载于小型仿箱鲀机器鱼上,通过水下实验研究了影响水下电场通信因素,无误码条件下接收电极间距为1.5 m时,通信距离可达到2.3 m
。薛伟课题组设计了一套基于电场通信技术的水下数字信号传输系统,可以在海洋环境中实现,通信频率为31 Hz的水下通信,当发射功率为20 W时,实现约30 m远距离语音通信
。
目前国内外的水下电流场模型都是基于电流进行建模,而大多数水下电场通信设备都是基于电压的形式进行传播,受水质及电极间距的影响,发射电极之间的电流是不定的。本文基于电压对水下电场通信进行仿真建模分析,建模参数如表2所示。对发射电偶极子施加12 kHz激励信号,电偶极子产生的电场分布呈对称分布,如图13所示。分别在相距电偶极子中点
轴方向上3、4、5 m处提取出电场强度,设定接收电极间距为1 m,则此时的电场强度即接收极板电势差,接收电极电势差如图14所示,可知随着距离的增加,电场强度呈逐渐衰减趋势。
1 水下电流场通信的可行性分析
1.1 基于电偶极子的水下电场通信原理

由于分析交变电偶极子的性能仍然过于复杂,需要进一步简化分析,限制系统工作在近场区域,如果工作区域半径
满足以下不等式,则近场假设成立
,即
(1)
(2)

包络解调信号波形如图11所示,可以完美地还原基带信号,接着通过UART传输电路将基带信号传输至MCU中,水下电场通信接收到的数据如图12所示。
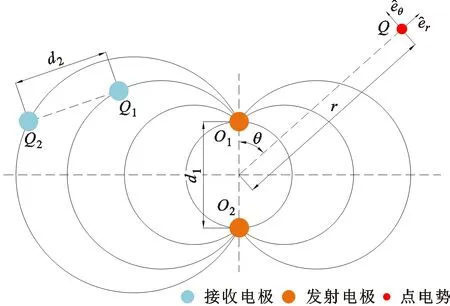
电偶极子通信模型如图2所示,图中
与
表示一对满足准静态电场的交变电偶极子,
是距电偶极子距离为
、角度为
的点。在
点处产生的电场强度为

(3)
在自然界中,Gymnotid和Mormyrid这两种鱼类具备电感知能力,它们依靠这种能力进行信息的交流以及目标的定位探测,这种鱼类被称为弱电鱼
。其中对于信息的交流,弱电鱼通过自身的电器官放电(EOD)产生具有特定频率与波形的电信号,而另一弱电鱼可通过自身的电感受器官接收电信号,并通过神经系统进行识别该信号特征,这一过程称为电场通信
。与其他传统水下通信方式相比,尽管电场通信距离较近,但电场通信稳定性更高,不易受环境干扰。据目前学者对弱电鱼智能感知的机理研究,发现了基于电偶极子的水下电场通信模型。水下电场通信是基于水下信道通过电流或者电场进行信号的传输,究其本质其实是一种电磁波传输。众所周知,电磁波在传输过程中,会产生传导电流与位移电流,而要实现水下电场通信,则需减小或者消除位移电流的影响。据目前国内外研究可知,当电磁波的频率较低时,传导电流占主要成分,位移电流可以忽略不计,这样的电流场可称为准静态电场。



(4)
可知,接收电极之间电势差随着
、
和
增大而增大,随着距离
的增大而减小。
1.2 水下电流场通信原理
与模拟通信相比,数字通信具有较高的抗噪声能力,易于集成到微控制器中。因此,本论文采用数字通信方法对水下群集机器人进行电流场通信。通常,要使数字信号在有限带宽的信道中传输,就必须用数字信号对载波进行调制与解调。
目前,使用较为广泛的调制方法主要为二进制幅移键控(2ASK)、二进制频移键控(2FSK)以及二进制相移键控(2PSK)。本论文设计的电场通信频率为12 kHz,在对通信速率要求并不很高的情况下,主要考虑技术的可实现性问题,所以选用一种技术实现相对简单的2ASK调制方式。在2ASK调制中,载波的幅度只有两种变化状态,即利用数字信息0或1的基带矩形脉冲去键控一个连续的载波,使载波时断时续输出。有载波输出时表示发送1,无载波输出时表示发送0。2ASK信号可以认为是一个单极性的矩形脉冲序列与一个载波相乘,即
采用自动舵技术,借助螺旋桨的推力和两个螺旋桨的速度差来实时调节航速和航向,实现自动按照预先设定的计划的航线进行精准的走线、换线及回归等功能。
由于经过调制后的信号质量较差,故在调制电路后使用SN74LS04NSR芯片U
,其中符号A代表非门输入,Y代表非门输出,本文采用双非门对信号整形。由于调制信号在水下会存在衰减,故本文采用半桥放大电路对调制信号进行放大。该电路主要由两个NPN三极管、PNP三极管、电阻
、
以及可变电压源
构成。整形的调制信号再经过非门实现电平翻转后,流经此放大电路。当放大电路输入为高电平时,三极管Q
、Q
导通,三极管Q
截止,发射电极I、II低电平,发射电路电极板发射电压0;当放大电路输入低电平时,三极管Q
、Q
截止,三极管Q
饱和,发射电极I电势为
,发射电极II接GND,发射电路电极板发射电压
,由于
为可变电压源,故可以通过调节
进而改变发射电路输出脉冲的电压。
(
)=
(
)cos(
+
)=

(5)
式中:
(
)为持续时间
的矩形脉冲;
的取值服从以下关系
(6)
在本论文中,采用单片机产生PWM波为载波信号,串口实现基带信号的传输。
振幅键控信号的解调主要有包络检波法和同步检测法两种方法,同步检测法又被称为相干解调法。在大信噪比条件下,为了得到给定的误码率,相干解调法所要求的信噪比与包络检波法相近,即在大信噪比条件下,这两种检测方法的抗噪声性能相差并不多,但包络解调工程实践起来较为简便,故本研究内容采用包络解调。包络解调主要由整流、低通滤波器、判决输出以及位定时脉冲模块组成,其中低通滤波器主要起包络作用,通过位定时脉冲进行码元同步进而判决输出,ASK包络解调原理图如图4所示。

2 电流场通信系统设计
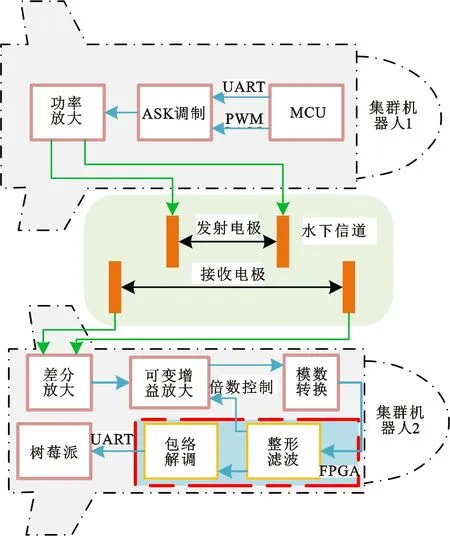
为了实现小型化、可集成化、低功耗水下电场通信系统,设计一款模数融合的电流场通信系统,水下电场通信系统如图5所示。单片机UART输出一路基带信号和一路PWM载波信号,通过ASK调制、功率放大电路将信号输入至水中的一对发射电极,信号在水下信道中通过电流场进行传播。集群机器人2通过一对接收电极接收信号,并通过差分放大、模数转换电路输入至FPGA芯片中进行数字整型滤波、解调、以及放大电路的自动增益控制,并由UART输出至树莓派中进行处理。
植物中的花青素的合成受到很多因子的影响,其中,光是影响花青素合成的最为重要的环境因素[9-11]。在实际生产中,发现部分茄子在弱光条件下果皮中依旧有花青素合成。为了进一步深入研究光诱导调控茄子花青素合成的机制,本研究对不同茄子种质资源的光敏类型系统地进行鉴定,利用高效液相色谱与质谱联用技术,确定了光不敏感型茄子果皮中的花色苷种类。本研究为探究茄子中花青素合成的理论提供基础,深入研究茄子光敏性状的调控基因和机制对茄科植物遗传育种及工业生产具有重要意义。
2.1 电流场通信系统底板电路设计
为了实现水下机器人集群通信,进行了水下电场通信模拟电路的设计。发射电路主要由基带信号载波信号发生电路、2ASK调制电路以及信号放大电路组成,发射电路如图6所示。图6中载波信号与基带信号由MCU产生,基于上一节理论推导可知,为满足近场通信条件,载波频率为12 kHz,为了实现信号的调制,基带信号采用串口600波特率传输速率。2ASK调制电路主要由电阻
与二极管
构成与逻辑电路。

1.1 研究对象 2016年10月至2018年3月在复旦大学附属眼耳鼻喉科医院眼科门诊诊断为视野损害前青光眼(开角型)的患者。
2.抓好职工队伍管理,实现“七化”工作目标。要组织开展“两个教育一个分析一个谈心”活动,每月开展一次职工思想政治教育,每月进行一次职工思想动态分析,每月不定期找几名有代表性的职工谈心交流 。并利用“一封家书”信箱,及时掌握职工的思想动态,加强职工八小时以外的管理。推动井站管理的精细化、规范化和程序化,实现“人际关系亲情化,生产运行标准化,油井管理精细化,素质提升全面化,工作环境景观化,班组效益最大化,挖潜增效节能化”的“七化”工作目标。
20世纪80年代至90年代以来考古工作者在柴达木盆地持续执着地对不可移动文物的调查、对都兰墓葬群连续不断的抢救性发掘工作,为我们研究丝绸之路提供了崭新的实物资料,同时具有廓清、实证丝绸之路青海道的存在及其重要意义。


根据以上设计,本文开展了水下电场通信系统发射接收电路的布局布线以及制版实现,以解决水下电场通信大型化弊端,便于水下机器人小型化,PCB板主要可分为电源管理电路、发射电路以及接收电路,电路板如图8所示。

2.2 电流场通信系统数字逻辑电路设计
为了实现水下电场通信,关键在于信号的调制解调,本文采用2AKS数字解调方法。水下电场通信数字系统如图9所示,数字逻辑电路主要包括时钟分频模块(ip_pll)、模数转换驱动(ads8411)、整流滤波(commutator)、2ASK解调(AskDemod)、PGA增益控制(PGA_CONTRL)以及串口传输(uart_top)数字电路。

数字调制信号通过commutator对带有噪音的调制信号进行归一化处理得到commutator_out[7:0]。本文采用包络解调算法对调制信号进行解调,非相干解调数字电路AskDemod如图10所示,主要由低通滤波器模块(ip_fir)、符号判决门限模块(Gate)和锁相环位同步模块(BitSync)组成。低通滤波器对调制信号进行包络处理,得到基带信号fir_data[13:0],为了最大可能无差错地在接收端还原出原始数据,还需要对其进行符号定时及判决输出,其中符号判决门限模块基于256个采样周期的基带信号fir_data[13:0]求均值获得最佳的判决门限mean[13:0],通过比较基带信号与门限关系得到判决输出信号cmpout;锁相环位同步模块需要产生与输入数据频率一致的位同步时钟信号Sync,保证每一位数据判决一次,同时需要选择信噪比最大的时刻对基带波形进行判决,以提高判决的正确性,输出基带二进制码流dataout。最后由uart_top串口传输电路的UART_TX端口输出至树莓派中。整个数字电路采用50 MHz系统时钟sys_clk,由分频电路产生clk1用于数字电路主要采样频率50 kHz,clk2解调电路位同步驱动时钟200 kHz。
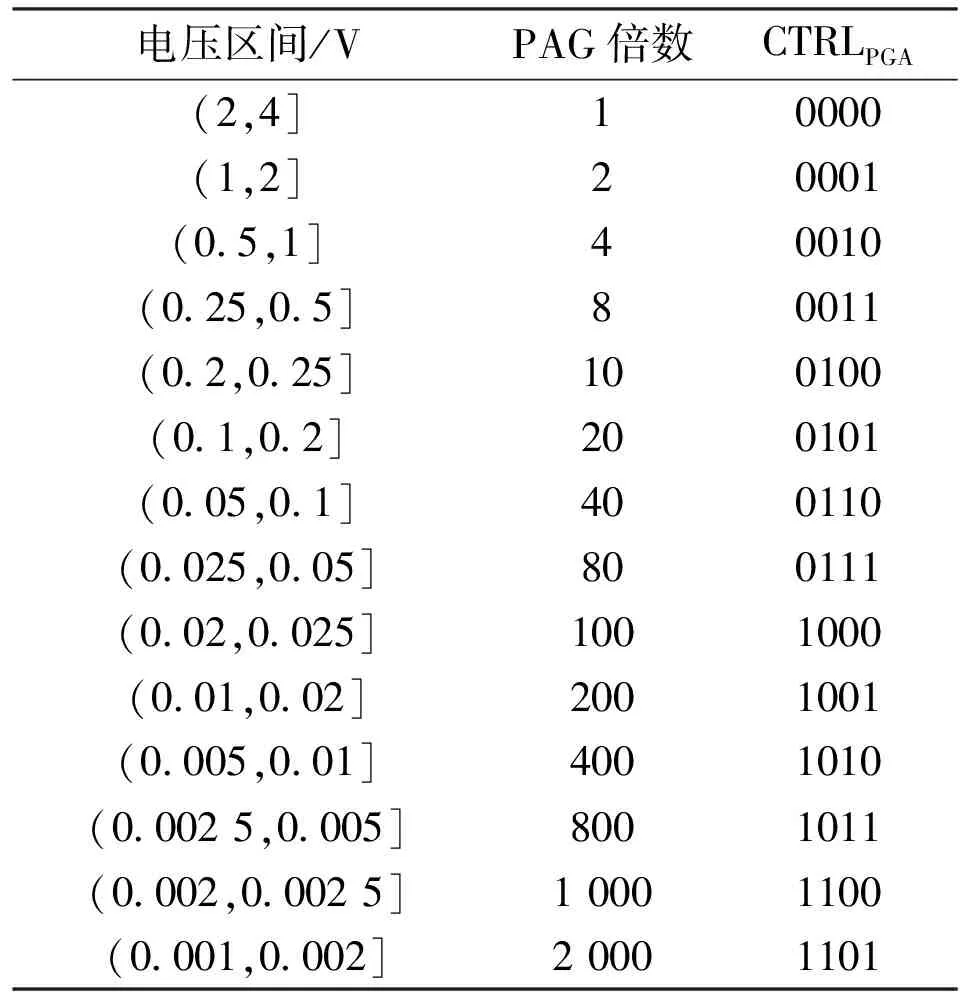
模数转换驱动电路将模拟电路中接收到的调制信号Ad_dB[15:0]转换为数字量Ad_DATA[15:0],之后PGA增益控制(PGA_CONTRL)模块通过提取ADS8411模数转换波形电压值,而后采用一系列数字比较器进行电压比较分类,进而根据不同电压值控制PGA_A0、PGA_A1、PGA_A2和PGA_A3输出电平对PGA进行倍数控制,使得最终接收到的电信号幅值达到数字电路可解码范围,以实现对水下电场通信的微弱信号进行自适应放大控制。FPGA数字电路的电压区间与自适应控制倍数如表1所示,其中CTRL
为4 bit控制信号,对PGA放大倍数进行控制。

式中:
为波长;
为磁导率,
=1
257×10
H/m;
为电导率,
=5
64×10
S/m;
为电信号传播角频率,
=2π
;
为电信号传播频率。如此可得满足准静态电场所对应的通信频率
曲线,如图1所示。由图1可以看出,随着通信距离的增加,达到准静态电场条件的通信频率逐渐降低,这是由于水下高频电信号衰减较严重,并且本文拟设计水下机器人集群电场通信系统,对通信速率有一定的要求,故本文采用12 kHz通信频率。


3 实验验证及分析
3.1 水下电场通信仿真建模分析
根据上述研究可以发现,目前水下电场通信已经实现了中远距离的通信,大多数水下电流场通信设备尺寸较为庞大、功耗较大、大都为超低频通信并且不能动态适应通信距离、实时调整系统的通信距离。而水下机器人集群通信系统,由于群集要求,对通信设备尺寸以及功耗有所要求,并且需要根据距离不同实时调整通信系统的放大倍数、自适应调整通信距离。故本文将开展一种低功耗、轻量型的水下电场通信系统的设计与研制,为实现水下机器人智能集群协同作业夯实基础。


本文所设计电场通信系统应用于水下机器人集群通信,则水下电场能否穿透障碍物至关重要。故本文进一步对水下电场通信穿透障碍物进行建模分析,如图15所示。通过仿真结果可知,水下电场可以穿透障碍物,且不影响调制波形,但经过障碍物后会有所衰减,如图16所示。



为了分析障碍物类型对水下电场通信影响,本文分别测量了不同尺寸的正方体和球型障碍物环境下,距发射电极5 m处电场强度变化,结果如表3所示,其中尺寸分别代表正方体边长以及球型障碍物的直径。由表3可以看出,随着障碍物尺寸的增加,测点的电场强度在不断下降,并且通过球型障碍物后的电场强度比正方体的要高。
互联网时代影响下的农药行业,爆品思维已变得越来越重要。在互联网环境下,爆品战略已上升为企业战略,没有爆品的企业很难生存下去,为什么呢?因为互联网上的信息透明,谁好谁坏,谁是第一品牌,一目了然,如我们熟悉的打车软件,除滴滴、快的,你还知道谁?我们常用的共享单车,膜拜、小黄车之外,有人关注第三吗?所以我们惊奇地发现互联网时代没有“小三”。
3.2 水下电场通信可行性分析
为了测试评估本文所设计的水下电场通信系统,本文主要开展了两个实验。侧重点放在控制水下电场通信距离的指标和水下电场通信距离指标。

本实验设备采用的是两套小型化水下电场通信系统、一对间距40 cm接收电极片(40 mm×40 mm×1 mm)、一对间距15 cm发射电极片(10 mm×10 mm×1 mm)、PC以及3 m×2 m×30 cm水池,水池中水的电导率实测为4.87×10
S/cm,其中小型化水下电场通信系统如图17所示,实验设备如图18所示。为了防水,本实验将电极板置于水池中,将水下电通信系统放在水池旁,并使用PC串口调试助手查看通信误码率。
河北省沿海区域的潮汐比较特殊,潮差非常小。平均高潮线、平均低潮线、0m线高程差较小,只有约30cm,通过无人机获取的DEM,虽然从测绘角度上满足1∶2000精度,但实际上无法对3条线(尤其是平均低潮线)进行正确、有效的提取。下一步应考虑开展海岸线附近区域LiDAR扫描工作,或采用LiDAR和水下地形测量相结合的方法获取海岸带更加精细的DEM。


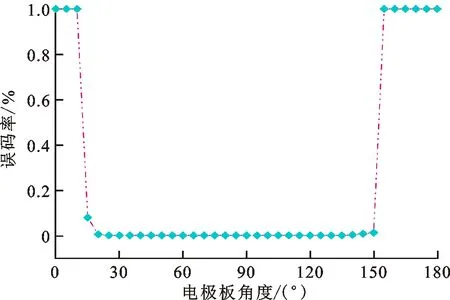
本实验主要评估不同的PGA放大倍数对水下电场通信误码率的影响,由于受本水池长度的影响,完成了2.5 m之内的通信实验,设置最大放大倍数为40,不同PGA放大倍数对通信距离误码率的影响如图19所示。在同一PGA放大倍数条件下,随着距离的升高,水下电场通信信号衰减增大,接收极板感应到的电动势减小,水下电场通信误码率在某一距离下从0突变至100%,由图19可知,本文设计的水下电场通信采用了commutator整流滤波模块,低于所设阈值输出为零,因此当接收电路接收电压低于阈值时,将不会被解码,因此到达一定距离后,误码率急剧上升。这一临界值随着PGA放大倍数的增大而增大,这是由于PGA倍数越大电路识别微弱信号的灵敏度越高。其次,由于水下机器人集群通信时,各个个体之间并不是严格平行的,由式(3)可知,发射接收电极之间的角度对水下电场通信影响较大,故本文开展了水下电场通信角度实验,如图20所示,该实验装置和水下电场通信距离实验一样,通信距离为1.5 m,本实验研究当接收电极固定,发射电极改变不同角度对通信性能的影响,定义虚线为发射电极与接收电极中线成0°位置,依次将发射电极逆时针旋转每隔5°做一组实验,测量通信误码率。


角度对水下电场通信误码率影响如图21所示,可知当夹角为0°~10°、155°~180°时,通信误码率为100%,15°为7.88%,20°为0.46%,140°为0.25%,145°为0.72%,150°为1.1%,其他角度误码率为0,由实验结果可知,当接发电极平行时(90°)通信效率最高,相互垂直时(0°、180°)误码率达到100%。根据电场通信理论,可知感应电动势为一对发射电极产生的电场在一对接收电极处产生电势差,当两对电极平行时,所产生的电势差为最大值;当两对电极垂直时,所产生的电势差最小。由图3可知,接收极板与发射极板由平行(夹角90°)趋于垂直(夹角0°、180°)过程中,接收极板两电极之间的电势差逐渐减小,直至夹角为20°、150°时,此时电动势为电路可识别最微弱电压,故当夹角为20°~150°时,误码率基本维持在零点,不会产生误码,该结果与理论分析基本一致。
4 结 论
本文主要围绕解决水下机器人集群通信系统大型化、高功耗、通信距离受限等问题,对如何建立水下电偶极子通信模型、如何更好地实现水下电场通信调制解调进行了研究,设计了一套基于水下电流场理论的低功耗数模混合集群通信系统,并开展了水下电场通信系统小型化制版实现。为了验证该系统的通信性能和可行性,本文开展了水下电场通信极限距离的测定实验,得出在2.4 m内本文水下电场通信系统的可行性且误码率为零的结论,验证了收发电极之间的通信角度对水下电场通信性能的影响,当发射极板与接收极板中垂线夹角为0°~10°、155°~180°时,通信误码率为100%,15°为7.88%,20°为0.46%,140°为0.25%,145°为0.72%,150°为1.1%,其他角度误码率为0。论证了水下电场通信理论接发电极角度对通信性能的影响,两极板平行时通信性能最佳,两极板垂直时误码率为100%。
:
[1] QIN Chuan, DU Jun, WANG Jingjing, et al. A hierarchical information acquisition system for AUV assisted Internet of underwater things [J]. IEEE Access, 2020, 8: 176089-176100.
[2] 丁文俊, 宋保维, 毛昭勇, 等. 海洋动能发电装置在水下探测航行器的安装位置对发电性能的影响 [J]. 西安交通大学学报, 2016, 50(1): 108-114.
DING Wenjun, SONG Baowei, MAO Zhaoyong, et al. Influence of installation position of ocean kinetic energy converter on the power generating performance in underwater detection vehicles [J]. Journal of Xi’an Jiaotong University, 2016, 50(1): 108-114.
[3] 张秋月, 张林让, 谷亚彬, 等. 恒包络OFDM雷达通信一体化信号设计 [J]. 西安交通大学学报, 2019, 53(6): 77-84.
ZHANG Qiuyue, ZHANG Linrang, GU Yabin, et al. Signal design of communication integration for radars with constant envelope OFDM [J]. Journal of Xi’an Jiaotong University, 2019, 53(6): 77-84.
[4] 杨洋, 张瑞智, 张杰, 等. 植入式医疗装置的无线通信和能量收集电路 [J]. 西安交通大学学报, 2018, 52(7): 160-166.
YANG Yang, ZHANG Ruizhi, ZHANG Jie, et al. A wireless communication and energy harvesting circuit for implantable medical devices [J]. Journal of Xi’an Jiaotong University, 2018, 52(7): 160-166.
[5] 邱逸凡, 李爽, 童峰. 一种浅海信道自适应调制水声通信方案 [J]. 舰船科学技术, 2021, 43(19): 158-162.
QIU Yifan, LI Shuang, TONG Feng. A shallow sea channel adaptive modulation underwater acoustic communication scheme [J]. Ship Science and Technology, 2021, 43(19): 158-162.
[6] 谢广明, 郑君政, 王晨. 水下仿生电场感知综述 [J]. 系统仿真学报, 2020, 32(12): 2289-2305.
XIE Guangming, ZHENG Junzheng, WANG Chen. A survey on underwater bionic electric perception [J]. Journal of System Simulation, 2020, 32(12): 2289-2305.
[7] RAZA W, MA Xuefei, ALI A, et al. An implementation of partial transmit sequences to design energy efficient underwater acoustic OFDM communication system [EB/OL]. [2021-10-10]. https:∥arxiv.org/abs/2007.01273.
[8] TANG Nvzhi, ZENG Qian, LUO Dongyan, et al. Research on development and application of underwater acoustic communication system [C]∥Journal of Physics: Conference Series. Bristol, United Kingdom: IOP Publishing, 2020: 012036.
[9] AMANTAYEVA A, YERZHANOVA M, KIZILIRMAK R C. Multiuser MIMO for underwater visible light communication [C]∥2018 International Conference on Computing and Network Communications (CoCoNet). Piscataway, NJ, USA: IEEE, 2018: 164-168.
[10]SCHIRRIPA SPAGNOLO G, COZZELLA L, LECCESE F. Underwater optical wireless communications: overview [J]. Sensors, 2020, 20(8): 2261.
[11]SCHULTZ C W. Underwater communication using return current density [J]. Proceedings of the IEEE, 1971, 59(6): 1025-1026.
[12]JOE J, TOH S H. Digital underwater communication using electric current method [C]∥OCEANS 2007-Europe. Piscataway, NJ, USA: IEEE, 2007: 1-4.
[13]谭涛, 王永斌. 潜水员水下近距离简易通信系统的设计 [J]. 通信技术, 2009, 42(8): 171-173.
TAN Tao, WANG Yongbin. Design of underwater close range wireless communication system for diver [J]. Communications Technology, 2009, 42(8): 171-173.
[14]吴志强, 李斌. 基于电流场的水下高速数字通信方法及实现 [J]. 传感技术学报,2010,23(11): 1590-1593.
WU Zhiqiang, LI Bin. An underwater high-speed digital communication solution using electric current method [J]. Chinese Journal of Sensors and Actuators, 2010, 23(11): 1590-1593.
[15]WANG Qinghao, LIU Ruijun, WANG Wei, et al. An electrocommunication system using FSK modulation and deep learning based demodulation for underwater robots [C]∥2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Piscataway, NJ, USA: IEEE, 2020: 1699-1704.
[16]ZHANG Han, WANG Wei, ZHOU Yang, et al. CSMA/CA-based electrocommunication system design for underwater robot groups [C]∥2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Piscataway, NJ, USA: IEEE, 2017: 2415-2420.
[17]ZHOU Yang, WANG Wei, DENG Hanbo, et al. Communication distance correlates positively with emitter current in underwater electric current communication [C]∥2016 35th Chinese Control Conference (CCC). Piscataway, NJ, USA: IEEE, 2016: 6397-6402.
[18]ZHOU Yang, WANG Wei, ZHANG Han, et al. Communication distance correlates positively with electrode distance in underwater electrocommunication [C]∥2018 IEEE International Conference on Robotics and Biomimetics (ROBIO). Piscataway, NJ, USA: IEEE, 2018: 88-93.
[19]ZHU Qixin, XIONG Wei, LIU Hongli, et al. A brief review of underwater electric current communication [C]∥2016 IEEE 20th International Conference on Computer Supported Cooperative Work in Design (CSCWD). Piscataway, NJ, USA: IEEE, 2016: 465-469.
[20]XUE Wei, SHU Xin. The analysis and optimization on electromagnetic compatibility for printed circuit board [C]∥Proceedings of International Conference on Information Sciences, Machinery, Materials and Energy (ICISMME 2015). [S.l.]: [s.n.], 2015: 1297-1300.
[21]WU Xiangshang, XUE Wei, SHU Xin. Design and implementation of underwater wireless electromagnetic communication system [C]∥AIP Conference Proceedings. USA: American Institute of Physics, 2017: 020022.
[22]LISSMANN H W, MACHIN K E. The mechanism of object location in Gymnarchus Niloticus and similar fish [J]. Journal of Experimental Biology, 1958, 35(2): 451-486.
[23]MOLLER P. Electric fishes: history and behavior [M]. London: Chapman and Hall, 1995.
[24]KRAMER B. Electroreception and communication in fishes [M]. Stuttgart: Gustav Fischer, 1996.
[25]WANG Wei, LIU Jindong, XIE Guangming, et al. A bio-inspired electrocommunication system for small underwater robots [J]. Bioinspiration & Biomimetics, 2017, 12(3): 036002.
