基于SLAM技术的地下空间三维实景建设关键技术研究
2022-06-05吕华新骆小龙
吕华新 陈 玲 骆小龙 杨 帆
1 宁波市奉化区测绘院,浙江 宁波,315500
2 宁波市测绘设计研究院,浙江宁波,315042
3 武汉大学资源与环境科学学院,湖北武汉,430079
智慧城市建设、古代建筑修复、灾害应急响应、室内定位导航、虚拟现实应用等领域对室内精细化三维模型的需求越来越多[1],如何快速有效地获取地下空间的精细化三维模型便成了新的研究热点。近年来,很多新的测量手段被用于地下空间的三维快速重建,其中又以三维激光扫描和近景摄影测量技术为主[2]。相较而言,三维激光扫描技术更为成熟,效率更高。然而,传统静态激光扫描技术不能实时快速地进行整体三维重建,所需工作量仍然较大[3]。但是随着同步定位和地图构建(simultaneous localization and mapping,SLAM)技术的日趋成熟,地下空间的三维实时快速重建成为可能。
本文以宁波市奉化主城区为试点区域,以银泰城、万达广场商业综合体为试点建筑,将推车式SLAM扫描仪集成全景相机与激光雷达,同步采集全景影像和空间深度信息,按照《宁波市城市规划地下空间普查测绘技术规程》的要求,普查建筑基础信息、测绘矢量图,并经过图像识别、点云拼接、集成发布,建立720°无死角的室内实景地图,构建地下空间基础数据体系和应用服务体系,完成地下空间数据体系与既有城市基础测绘成果体系的系统接口开发和数据融合。
1 基于SLAM技术的室内移动测量
SLAM的基本工作原理是机器人在环境和自身位置都不能够确定的情形下,在运动过程中逐渐建造增量式地图,并对自身位置和姿态进行实时估算,进行自主定位和导航[4]。国内外许多科研单位和企业已将研发力量投入SLAM技术在三维测图领域内的应用,通过对核心算法的优化,制造出可移动测量的激光扫描机器,能在室内和地下等没有GPS的环境中获得点云,从而实现三维建模。这种基于SLAM的空间三维数据获取技术,同时拥有激光扫描和移动测量两种技术的优点,成为了一种新的三维移动测量技术,使得三维建模领域的研究取得了重大进展[5]。
2 技术路线
2.1 室内SLAM实景三维扫描
本文使用的是室内SLAM扫描系统,其构成如图1所示。在整个测绘过程中,有2台垂直激光扫描仪和1台水平激光扫描仪始终保持运作,3台扫描仪中的每一台都可以捕捉30 m内270°范围内的景象,通过设计好的放置方式可以保证房间内的三维空间都可以被覆盖。6台照相机在执行“停止⁃运行”程序时,默认以1 m的间隔自动触发,照相机上都装有鱼眼镜头,可以捕捉720°全景照片,在扫描过程中会分别生成6张照片,在后期处理时要将这些照片拼接在一起。

图1 室内SLAM扫描系统构成示意图Fig.1 Diagram of Composition of Indoor SLAM Scanning System
通常情况下,需要根据建筑大小把一个建筑物分成几个小范围区域进行扫描,根据建筑平面图把室内划分成几个扫描区进行规划,在扫描完成后,便可以自动生成清晰的现场实景三维数据[6]。地下空间实景三维数据示例见图2。

图2 地下空间实景三维数据示例Fig.2 Example of 3D Real Scene Data of Underground Space
2.2 实景三维地图建库
1)点云拼接。对于完整的实体而言,一幅图的扫描信息通常不能全面展示出实体的所有特征,这就要求在实体的不同方位实施多个图幅扫描,这样就需要解决多个图幅之间如何进行拼接以及同名点匹配的问题[7]。在扫描时,扫描仪的方位是随机、不确定的,需要将两个图幅或者多个图幅拼接起来,通常是利用同名点匹配来实现的。这一过程是为了获得间接的地理参照。在地面上选择足够多的有特征的目标作为控制点,再利用目标的高对比度特征,实现影像的定位和匹配。在扫描时,还需要借助传统的测量工具(如全站仪)来获得每个扫描图幅中控制点的坐标和方位,再通过坐标的转换和计算,获得实体的点云在绝对坐标系中的位置。这些工作无法通过计算机自动完成,很多步骤仍需要人工参与,属于半自动化作业。
2)全景影像拼接。将多幅图像拼接成720°的全景图,由数据处理平台融合计算机视觉、计算机图形学、数字图像处理以及其他数学工具来完成。涉及的步骤主要有摄相机的标定、图像的畸变校正、图像的投影变换、同名点的选取、全景图像的拼接、图像的匀光匀色等。
3)点云与全景融合处理。基于SLAM的三维激光扫描技术逐渐成为获取三维空间数据的一种必要手段。它可以既快速又准确地获得大量实体的空间数据[8],同时,又可以通过高分辨率的数码相机获得高质量的二维纹理数据。两种数据对实体的描绘正好互补,将两者结合起来能够生成高精度的真实三维世界,为虚拟的三维世界的建造打下了较好的数据基础[9]。经过配准得到的彩色点云要比依靠强度渲染获取的灰色点云更加形象和可靠。通过激光点云构建场景空间信息,将点云与影像精确融合,形成实景三维数据库,点云与全景数据的融合示意图见图3。

图3 点云与全景数据融合示意图Fig.3 Diagram of Fusion of Point Cloud and Panoramic Data
2.3 矢量图数据建库
SLAM扫描完毕后,根据点云能够计算出建筑物的边界轮廓图,从而生成基本的矢量平面图。如果需要进一步加工,则可以根据这个矢量平面图进行进一步的人工干预操作,如图4所示。
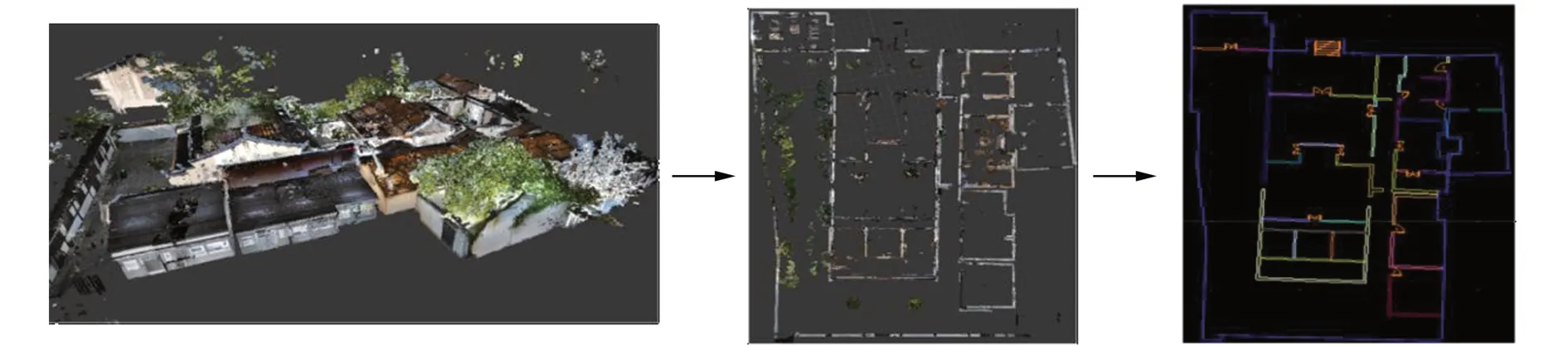
图4 矢量图编辑操作流程Fig.4 Editing Operation Process of Vector Maps
本文选定i Data数据工厂数据采集平台,按照《宁波市城市规划地下空间普查测绘技术规程》的要求,建立宁波市奉化区地下空间设施数据库。
2.4 应用系统开发
系统主要包括以下功能:地下空间的三维实景图浏览、海量数据承载、地下空间数据的二三维联动、实景测量、地下空间的功能区分区管理和分层展示、距离量测、设备信息的查询与展示、兴趣点(point of interest,POI)的展示和查询、实景地图与天地图的联动。
1)海量三维实景地图浏览。支持海量点云和影像承载,支持一次承载10亿级激光点云和上万张全景影像,预加载时间不超过10 s,正常使用无迟滞、卡顿现象。地下空间海量点云和影像示意图如图5所示。

图5 地下空间海量点云和影像示意图Fig.5 Diagram of Massive Point Cloud and Image Data in Underground Space
2)二三维联动。支持矢量地图直接以dxf格式导入,与实景地图实现统一坐标系下的位置关联,能够实现二三维地图的联动和关联,如图6所示。
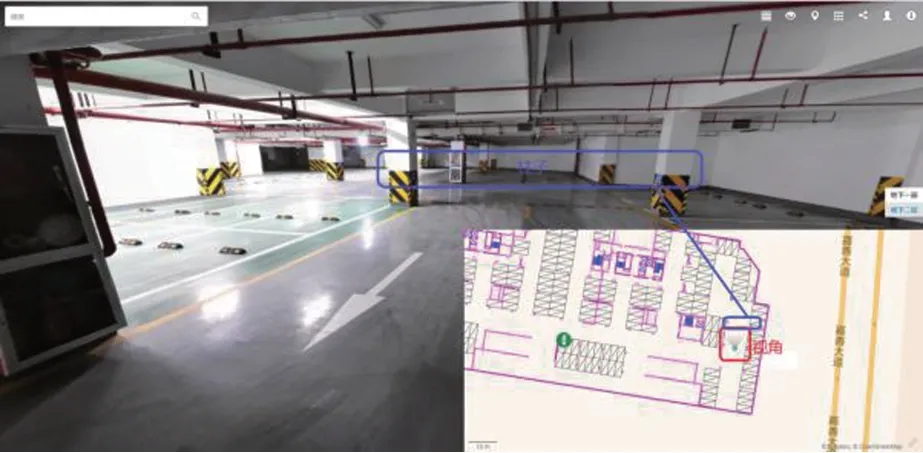
图6 实景三维地图与矢量图联动Fig.6 Linkage of 3D Real Scene Data and Vector Maps
3)基于影像的测量功能。能够基于影像和三维实景模型进行直接测量,判别净空和间距是否符合有关规范要求,如图7所示。

图7 基于实景影像的测量示意图Fig.7 Measurement Diagram Based on Real Scene Images
3 关键技术
3.1 多技术融合的室内定位导航技术
GPS信号无法满足地下和室内精确定位和导航的需求,当前常用的地下和室内定位技术主要有无线定位、传感器定位和匹配定位。为了提高定位的速度和精度,考虑到不同定位技术之间的优势互补,本文以图像识别技术为基础,采用Wi Fi和蓝牙设备辅助获取粗略的地理位置信息,以便在图像结构对比前缩小图像识别的搜索范围;结合智能手机终端自带的精密传感设备,判断移动的加速度、角速度和气压等,以提高定位的精度、可用度和可靠性。
3.2 非闭环检测的误差校正技术
根据内部传感器确定的轨迹估计,利用SLAM扫描技术虽然能够比较灵活地创建室内地图,但极易产生累积性的测量误差。目前主要的解决方案是通过规律性地重复扫描部分经过的区域,建立闭合路线,通过捕捉已知环境,生成准确的地图。但这种方法在遇到无法闭合的直线路径或者传感器局部的感知范围不全面时,无法保障定位导航的实时性和精确度。为此,本文提出一种独立于内部位姿估计,能适用于任意路径,包括闭环和非闭环检测的即时地图校正方法。其基本原理是通过采集SLAM锚定点真实世界的位置坐标,并将这些坐标作为地理参考,和采集的数据集自动联合,从而优化最终测量数据集的误差。
3.3 基于空间信息的统一管理
无论是室外信息还是室内信息,都通过空间信息化集成到统一的坐标系统和平台中。平台从室外到室内承载了区域内各类实体的空间数据,并且还可以加载各个业务部门的专业数据,除了可以实现基于实景的可测量、可查询、可分析等基本功能之外,还可以实现空间规划、管理、审核等专业功能。此外,在各管理部门内部采用统一的数据,避免了信息的反复采集,极大降低了人力物力的浪费。在项目审批、违法建设督查、不动产确权登记、地下空间开发利用、资产维护管理、消防应急、社区网格化管理等城市管理方面,该平台具备广泛的应用前景。
3.4 激光点云和全景影像融合技术
三维激光点云可以精确地记录实体的空间数据,而高分辨率的全景影像又可以形象地展示实体的二维纹理,两者结合起来能够生成高精度的真实三维世界[10]。采用控制点坐标自动匹配技术,找到三维激光点云对应的影像像素,生成彩色点云,为后续三维模型的构建、构筑物结构属性的识别等提供形象而直观的参考。当使用全景影像进行展示时,也可以通过影像的像素坐标找到与之对应的点云,实现对地物的量测运算。该技术在数字城市中有广泛的应用价值。
4 结束语
本文综合应用多技术融合的室内定位导航技术、非闭环检测的误差校正技术、激光点云和全景影像融合技术等新技术,改变了传统测量方式,大大提高了地下空间实景三维数据的生产效率和数据精度,为后续宁波市奉化全区地下空间普查工作的开展提供了可靠的技术保障。
