单频机载激光测深海陆回波自动分类方法
2022-05-31王丹菂林雨准李鹏程
王丹菂,邢 帅,徐 青,林雨准,李鹏程
1. 信息工程大学地理空间信息学院,河南 郑州 450052; 2. 近地面探测技术重点实验室,江苏 无锡 214035
机载激光测深(airborne LiDAR bathymetry,ALB)作为一种高效、灵活的浅海测量技术,弥补了传统声学测深在浅海测量中通行能力有限、测量效率低的技术缺陷,可广泛应用于浅海、海岸带和岛礁等地形的常规测量和应急测量[1-2]。ALB系统具备水陆同时观测的能力,通过发射和接收对水体具有较强穿透性的绿激光(532 nm)实现对地形和水深的测量。但由于受到水体折射的影响,激光在水体中的传播方向和速度会发生改变,因此在点云生成的过程中需单独对水底回波信号进行折射修正。此外,陆域和水域回波波形的构成不同使得在波形处理过程中也需要有针对性地采取不同的处理方式。海陆回波分类是在波形处理前将系统采集到的波形数据分为陆域和水域回波以便后续分开处理,从而提高最终点云成果的精度。
现有的海陆回波分类方法通常需要借助一些辅助数据,根据辅助数据的不同大体可分为3类:近红外通道辅助法[3],红光(拉曼)通道辅助法[4]和影像辅助法[5-6]。这3类方法分别需要系统配有近红外激光器、红光通道接收器和相机,其中近红外激光器在ALB系统中相对普及,且近红外通道回波特征相比红光通道和绿光通道具有更显著的海陆差异性[7],因此,近红外通道辅助法是目前主流的方法。最早的近红外通道辅助法为近红外饱和法[3],该方法是根据近红外通道回波信号的饱和时间来区分海陆回波。为提高分类精度,一些方法在近红外通道波形特征的基础上加入了绿光通道波形特征,如波形统计特征[8],波形高斯分解特征[9]和利用神经网络提取到的波形深度特征[10]。除利用波形特征外,文献[11]提出了一种基于点云特征的海陆回波分类方法,该方法利用近红外通道回波信号生成的点云确定水域点范围,从而实现海陆分类。
上述方法均能够获取较为准确的海陆回波分类结果,但在特征提取上依赖近红外通道的波形信息,绿光通道波形特征只是用于进一步提高分类精度而不具备独立分类的能力,不适用于仅能够发射和接收绿激光的单频ALB系统。这是由于海陆回波的差异主要体现在水面信号与地表信号的强度上,绿光通道的水面回波和水体后向散射在波形上存在部分重叠,导致水面信号难以被精确探测,即水面不确定问题[12],而近红外激光因无法穿透水体更适合用于区分海陆回波。绿光通道的水域回波虽然存在信号重叠,但依然包含水面信号特征,且相比近红外通道还含有水底信号特征,此外信号重叠特征也可用于区分海陆回波,因此单频ALB系统的海陆回波分类在理论上是可行的。
目前,ALB系统正朝着低成本、小型化的趋势发展[13],双频ALB系统虽然有助于海陆回波分类和水面信号检测,但同时会增加系统的重量、制作成本及降低系统集成化程度,单频ALB系统将系统重量集中在绿激光器上,有利于实现系统的小型化和灵活机动的测量,在有限的平台载重下也可进一步提高系统的测深能力。近年来,针对单频ALB系统的水面不确定问题,一些学者提出了误差修正模型[14-15]和波形分解方法[16-17],较好地解决了水面信号检测的问题,但缺少针对单频ALB系统海陆回波分类方法的研究,且大部分的现有方法都需要合适的阈值或人工采集的完备样本,不同系统或者不同测量环境下获取的波形数据在海陆分类时需要重新设置阈值和采集样本,不利于数据的自动化处理。
针对上述问题,本文提出一种单频机载激光测深海陆回波自动分类方法,一方面利用绿光通道的首末回波信号生成点云,以快速确定大部分回波的海陆属性,避免多信号回波的复杂波形影响特征提取的准确性;另一方面对位于海陆交界处的易混淆回波提取绿光通道的波形细节特征,利用点云高程特征筛选相似回波自动建立训练样本集,并通过支持向量机分类器(support vector machine,SVM)完成分类。利用双频ALB系统获取的实测数据比较分析了本文方法与4种近红外通道辅助法的海陆回波分类结果,验证了本文方法能够在不依赖近红外通道辅助的条件下实现海陆回波的自动、精确分类。
1 研究方法
绿光通道水面回波的不确定性是现有海陆回波分类方法需要近红外通道波形提供辅助信息的主要原因,其中不确定性主要体现在两个方面:一是在位置上,水面不确定问题导致无法直接通过对绿光通道波形的峰值检测确定水面信号的准确位置,而近红外激光因无法穿透水体能够较为精确地检测水面信号位置;二是在强度上,由于水面反射能量的方向性较强,在波浪的影响下又呈现随机性,使得系统接收到的水面回波信号强度差异较大,而近红外激光的大部分能量会被水体吸收,从而可以保证水面信号一直处于低强度水平。
绿光通道波形虽然无法直接准确检测水面信号的位置,但可以同时获得水面和水底信号的近似位置;虽然水面信号强度呈现随机性,但水域回波的信号重叠使得波形在能量分布上具有区别于陆域回波的特征,因此可利用绿光通道波形实现海陆回波分类。然而,绿光通道水面回波的不确定性有时会导致信号位置或波形特征的不可靠。为此,本文方法综合利用绿光通道回波的点云高程特征和波形特征实现海陆回波自动分类,主要包括基于首末回波点云的初分类和基于波形特征的未定回波分类两个步骤,方法流程如图1所示。一方面为避免水面回波位置不确定的影响,初分类仅处理与水面高程差异较大的回波,具体做法为先对绿光通道波形进行信号检测,然后依据点位计算模型将首末回波信号转换为点云,构建首次回波点云的高程直方图,并通过直方图拟合确定平均水面高程,将远离水面位置的回波依据高程进行海陆分类;另一方面为避免水面回波信号强度不确定的影响,在余下未定回波的分类中考虑波形的能量分布,具体步骤为:首先检测出波形的最强信号,将波形统一视为单信号回波,然后在此基础上提取波形的信号特征和总体能量分布特征,依据初分类中的点云高程特征筛选出相似回波自动生成训练样本集,最后利用SVM分类器确定未定回波的海陆属性。
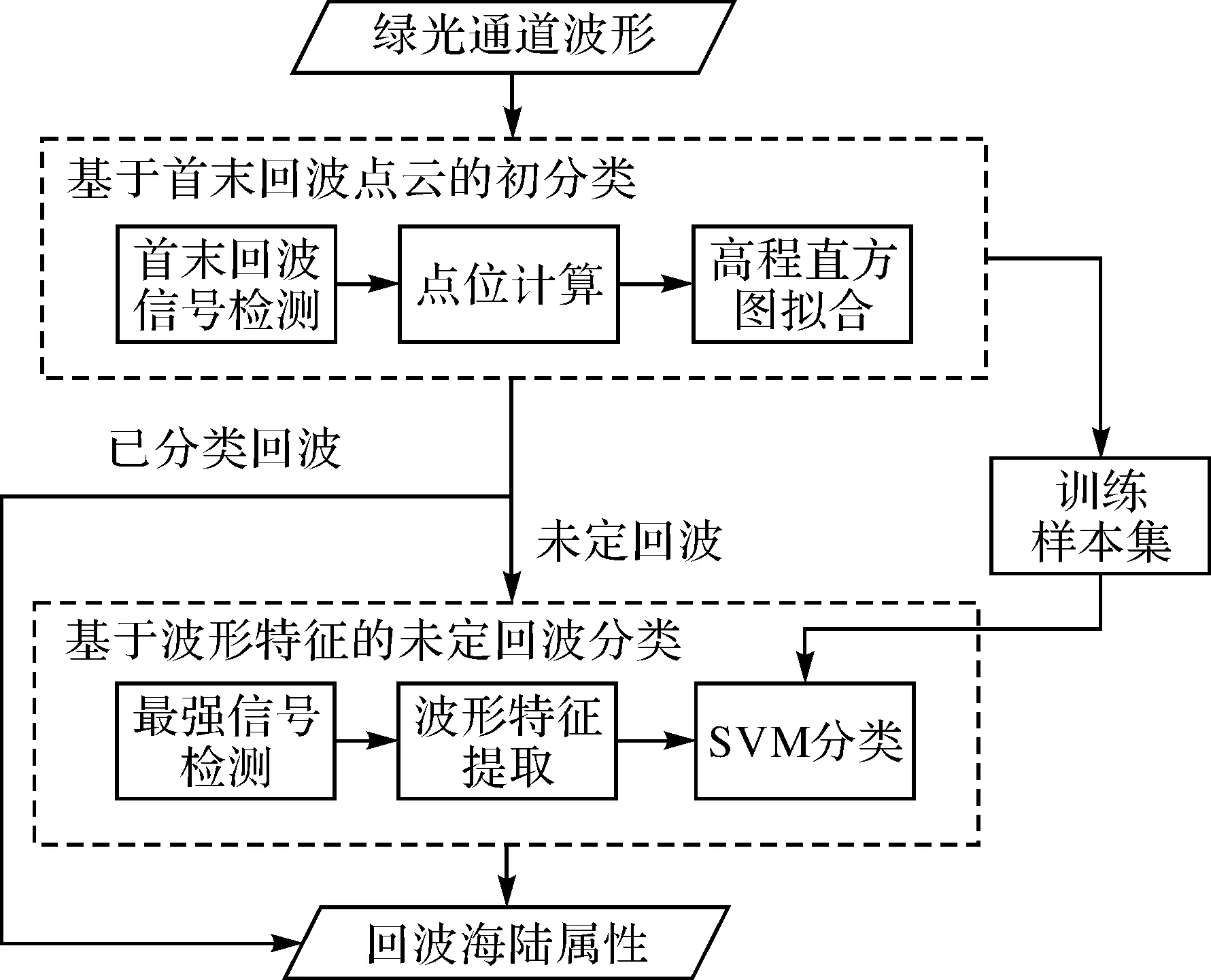
图1 综合点云高程特征和波形特征的机载激光测深海陆回波自动分类流程Fig.1 Flowchart of automatic sea-land waveform classifica-tion method for single-wavelength ALB
1.1 基于首末回波点云的初分类
1.1.1 首末回波信号检测
特征提取的准确性将影响分类的精度,对于点云高程特征的提取,关键在于从波形中精确检测出地物的回波信号。但由于背景噪声的存在,在信号检测时易发生误检测和漏检测,特别是在动态、复杂的水体环境下采集到的绿光通道水域波形,信号检测精度极易受环境影响,文献[11]在提取点云高程特征时选择了相对稳定的近红外通道波形。
从绿光通道波形中提取出可靠的点云高程特征,一方面通过波形去噪提高信号检测精度,另一方面在信号检测时仅保留首末回波信号。其中,首次和末次回波信号是指在一次绿激光脉冲内,系统绿光通道采集到的目标回波波形中的第一个和最后一个回波信号。根据ALB系统的点位计算模型[17],可将检测到的首次回波信号和末次回波信号转化为点云。由于暂未确定回波的海陆属性,因此在点位计算时暂不考虑水体折射的影响。图2为某海岛附近的首末回波点云剖面图,可以看出,从陆域采集到的首次回波信号通常来自树冠或建筑物顶层,末次回波信号通常来自地面;从水域采集到的首次回波信号大部分来自水面,只有在水深极浅时可能是水底信号或水面与水底信号的重叠,而末次回波信号通常为水底信号。因此,即使无法精确检测水面位置,从绿光通道波形中提取的首末回波点云高程特征在大部分情况下也具有显著的海陆差异性。

图2 首末回波点云剖面Fig.2 Profile of the point clouds from the first and last signals
首末回波信号检测的具体步骤如下。
(1) 波形有效范围计算。波形有效范围是指目标产生的所有回波信号(有效信号)在波形中的范围[18],以高于3倍噪声功率且持续时间超过5 ns的波形中存在回波信号为判断准则[19],缩小信号检测范围,具体做法详见文献[18]。
(2) 波形去噪。确定波形有效范围后,后续处理只需要考虑有效范围内的波形。由于波形中存在的高斯白噪声可能影响信号检测,为得到相对可靠的首末回波信号,在信号检测前对波形进行滤波是必要的。考虑到用于分类的首末回波信号不需要具有很高的精度,为提高计算效率,采用移动平滑算法(moving average,MA)
(1)
式中,w为原始接收波形;τ为采样间隔;2d+1为平滑窗口宽度;wMA为平滑后的波形。
(3) 峰值检测。对wMA进行极大值检测
k=find(diff(sign(diff(wMA)))<0)
(2)
式中,diff指差分运算;sign为符号函数;find表示查找数组中满足条件的数据编号k。
虽然波形有效范围的确定已将检测范围大大缩小,但深水水域波形的有效范围有时可长达300 ns,因此在实际处理中采取一种两端搜索的策略:分别从有效范围的首末两端出发,通过局部移动窗口进行平滑与峰值检测,若检测到信号则立即终止搜索,从而避免因波形有效范围跨度较大引起的处理时间过长问题,使信号检测的效率不受波形有效范围长度的影响。
1.1.2 高程直方图拟合
首次回波信号生成的点云中存在大量水面点,在局部范围内水面高程差异较小,对应在高程直方图中表现为一个峰值。对高程直方图按式(2)进行极大值检测,即可近似确定测区的水面高程。根据波浪影响下的水面偏移线性理论[20],水面高程应服从正态分布,因此选用单个高斯函数拟合高程直方图
(3)
式中,A、μ、σ为高斯函数的3个参数,分别表示峰值强度,峰值位置和波峰宽度,其中A和μ的初值由极大值检测的结果确定,σ的初值设置为系统标称的高程测量中误差。采用Levenburg-Marquardt(LM)算法[21]求解拟合参数,将峰值位置μ作为平均水面高程(mean water level elevation,MWLE)的近似,σ作为水面高程离散程度的估计值。
首次回波信号在陆域记录了表面覆盖地物的顶部位置,在水域记录了水面点位置,若其对应点位的高程高于MWLE,则可确定为陆域回波;末次回波信号在陆域记录了地面点位置,在水域记录了水底点位置,若其对应点位的高程低于MWLE,则可确定为水域回波;而高程与MWLE相近的回波由于暂不能确定海陆属性,归为未定回波。对每一帧波形依据提取到的点云高程特征进行分类
(4)
式中,H1和H2分别表示首次和末次回波信号在点云中的高程;T为用于判断海陆属性的阈值,本文将T设置为3σ。
1.2 基于波形特征的未定回波分类
1.2.1 未定回波分析
基于首末回波点云的初分类可确定大部分回波的海陆属性,余下未定回波集中在海岸带附近,其中陆域回波通常为裸露的滩涂,水域回波则往往具有较浅的水深(水深小于2 m)。两种回波信号对应的点位高程相近,但由于海岸线高程值是随岸线变化的[22],加上波浪的影响,使得陆域点高程不一定总是高于水域点,从点云高程特征上难以对二者进行区分。如图3所示,未定回波中的陆域回波通常仅包含一个信号,而水域回波是由水面信号、水底信号和水体后向散射构成的[12],因水深较浅三者相互重叠,但由于水面信号强度的变化,即使是相同水深下的波形也具有不同的形状。总体而言,未定回波中的陆域回波和水域回波在波形上形状相似,因此未定回波的分类需要提取更多的波形细节特征。根据前期试验分析发现未定回波的海陆差异主要体现在以下方面。
(1) 回波强度。由于水体对绿光的吸收能力一般强于滩涂,陆域回波信号通常具有更高的回波强度。
(2) 回波宽度。陆域回波因仅包含地面的回波信号,信号宽度与激光发射信号宽度基本一致,而水域回波中3种信号的相互重叠会导致波形被拉伸变宽。
(3) 回波能量分布。海陆回波的构成不同使得两者在能量分布上也存在差别,陆域回波信号形似激光发射信号,能量分布情况也基本保持一致,而水域回波的能量分布情况更多地取决于信号的重叠程度和水面信号强度。
因此,可以从未定回波中提取能够反映回波强度、宽度和能量分布的波形特征用于未定回波的海陆分类。

图3 未定回波中的陆域回波和水域回波Fig.3 Typical undefined waveforms from land and water
1.2.2 波形特征提取
由式(4)可知,未定回波首末回波信号的对应点高程均在MWLE附近,表明未定回波的波形有效范围较窄,在陆域大概率是一个单信号回波,在水域波形主要由一个较强的底部回波信号和一个较弱的水面回波信号组成,这是因为水底反射趋近于漫反射,反射能量分布均匀更易被系统采集。为便于处理统一将未定回波视为单信号回波,在波形特征提取时仅保留其中的最强信号,即地面回波信号(陆域)和水底回波信号(水域)。根据1.2.1节的分析,海陆回波因传输路径不同在强度、宽度和能量分布上也存在差异,因此相应地从波形中提取信号强度、信号饱和时间、波形曲线下面积、波形有效范围长度、信号偏度和信号峰度共6个波形特征,如表1和图4所示。

表1 波形特征描述

图4 波形特征提取Fig.4 Illustration of waveform features extraction
波形特征的具体定义如下。
(1) 信号强度IG反映目标对绿光的反射率。未定回波在信号检测时通常只能检测到一个回波信号,若回波信号不唯一,则取其中最强信号的峰值。
(2) 信号饱和时间tS是用于修正存在饱和现象的回波信号强度。对于ALB系统,其接收器的动态接收范围(dynamic range)[23]的长度是固定的,为能够探测到微弱的水底信号,一些陆域和极浅水的水底回波信号强度可能会超出接收器的接收范围,从而出现信号饱和现象。tS表示信号强度超出接收器最大正常记录值IS所持续的时间。
(3) 波形曲线下面积S反映回波信号的总能量。与IG不同,S包含整个时间段系统接收到的能量,而不是单一时刻的值,用于在一些特殊条件下对IG的修正:对于陆域波形,若存在多次回波则可能影响IG的大小;对于水域回波,S包含水面、水底反射和水体后向散射,不受信号重叠的干扰。S的计算公式为
(5)
式中,tL和tR分别表示波形有效范围的左右端,为保留波形的原始信息,计算时采用原始波形w。
(4) 波形有效范围长度L描述回波信号的持续时间,也能在一定程度上反映信号的重叠情况,其计算公式为
L=tR-tL
(6)
(5) 信号偏度Sk为三阶中心矩用于描述信号能量分布的偏移情况[8,24],信号左偏时Sk小于零,右偏时Sk大于零,无偏时Sk等于零。陆域回波信号因形似激光发射信号,而激光发射信号通常为高斯信号,因此Sk接近零;海域回波因包含多个信号,因此大部分情况下呈偏态分布,Sk绝对值较大。Sk的计算公式为
(7)

(6) 信号峰度Ku为四阶中心矩用于描述能量变化的趋势[8,24],能量变化速度越快,波形起伏越大,则Ku越小。信号重叠现象在陆域回波信号中极少出现,而在水域回波信号中普遍存在,导致水域波形被拉伸而变宽,因此水域回波的Ku通常较大。Ku的计算公式为
(8)
1.2.3 训练样本集选取和SVM分类
初分类中已确定海陆属性的回波可为未定回波分类提供大量的训练样本,但未定回波与大部分的已分类回波相似度不高,且在波形特征提取时将波形处理为单信号回波这一做法并不适用于存在多信号的已分类回波。由图3可知,未定回波中的海陆回波在大体上是相似的,说明首末回波点云的高程范围在一定程度上控制着波形的形状。
由式(4)可知,未定回波的点云高程特征满足条件μ-T≤H2≤H1≤μ+T,因此H1接近μ+T的回波大概率是一个仅存在单信号的陆域回波,H2接近μ-T的回波大概率是一个来自极浅水域的回波。利用高程特征选取样本能够自动生成与未定回波形状相似的训练样本集,从而可以保证波形细节特征提取的准确度,存在的少量错误样本可能会降低训练收敛的速度,但不会过多地影响分类器训练的效果。此外,选取样本时的区间范围是可调的,区间越大样本数量越多,但同时会降低样本的可靠性及与未定回波的相似性,因此区间大小需要根据数据的实际情况选取。如图5所示,本文这里将首次回波信号满足μ+2σ≤H1≤μ+4σ的回波作为陆域回波样本,末次回波信号满足μ-4σ≤H2≤μ-2σ的回波作为水域回波样本。
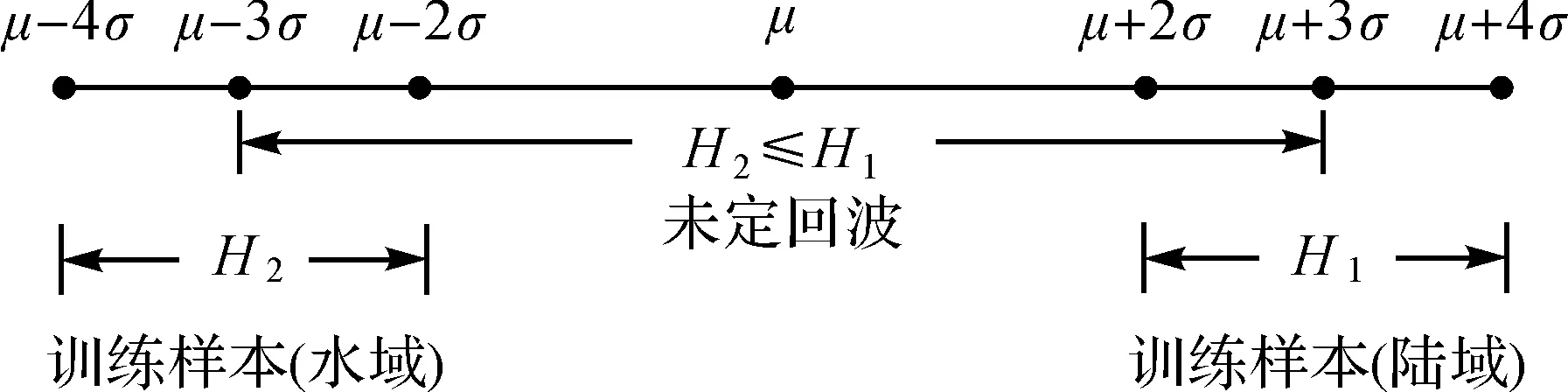
图5 训练样本集选取Fig.5 Train sample set selection
高程条件的限制使得自动建立的训练样本集包含的样本数量较少,考虑到SVM分类器在小样本训练集上通常能取得较好的分类效果,这里选择SVM分类器对未定回波进行分类。在分类前,对提取到的特征作归一化处理,消除尺度差异影响
(9)
式中,x为特征向量;x*为归一化后的特征向量;μF和σF为特征的均值和标准差。
利用SVM分类器将特征非线性变换至高维空间,在新空间中确定最优分类面,其中非线性变换选用的核函数为径向基函数(radial basis function,RBF)
(10)
式中,σ为尺度参数,通过寻优函数确定。
2 试验结果与分析
2.1 试验数据
试验数据为国产双频ALB系统Mapper5000[25-26]于2018年3月在海南七连屿获取的实测数据,包括波形、POS和码盘数据。Mapper5000是中国科学院上海光学精密机械研究所研制的新型机载双频激光雷达系统,可同时发射532 nm的绿激光和1064 nm的近红外激光。扫描方式为类圆锥扫描,扫描角为±15°。系统接收器共包含4个通道,1个近红外通道APD和3个绿光通道PMT1-PMT3,其中PMT1和PMT2采用小视场角接收,接收方向相互垂直,PMT3采用大视场角接收。有关数据获取的详细参数见表2。
试验选取了位于不同航线的2个测区的数据:包含自然海岸的数据1和人工海岸的数据2,以检验本文方法对不同地形的适用性,相关信息见表3。此外,由于PMT1通道的参数设置与其他ALB系统相似,因此试验仅使用绿光通道中PMT1通道采集的波形数据进行试验。因缺少与实测数据同步获取的影像,本文将人工判读的海陆分界线作为标准分类。人工判读综合了4个通道的波形数据和非同步影像提供的信息,较为准确地确定了测量时刻的海陆分界线位置,如图6所示,其中黑色矩形为选取的实测数据范围,红色虚线为人工判读结果。

表2 实测数据获取参数
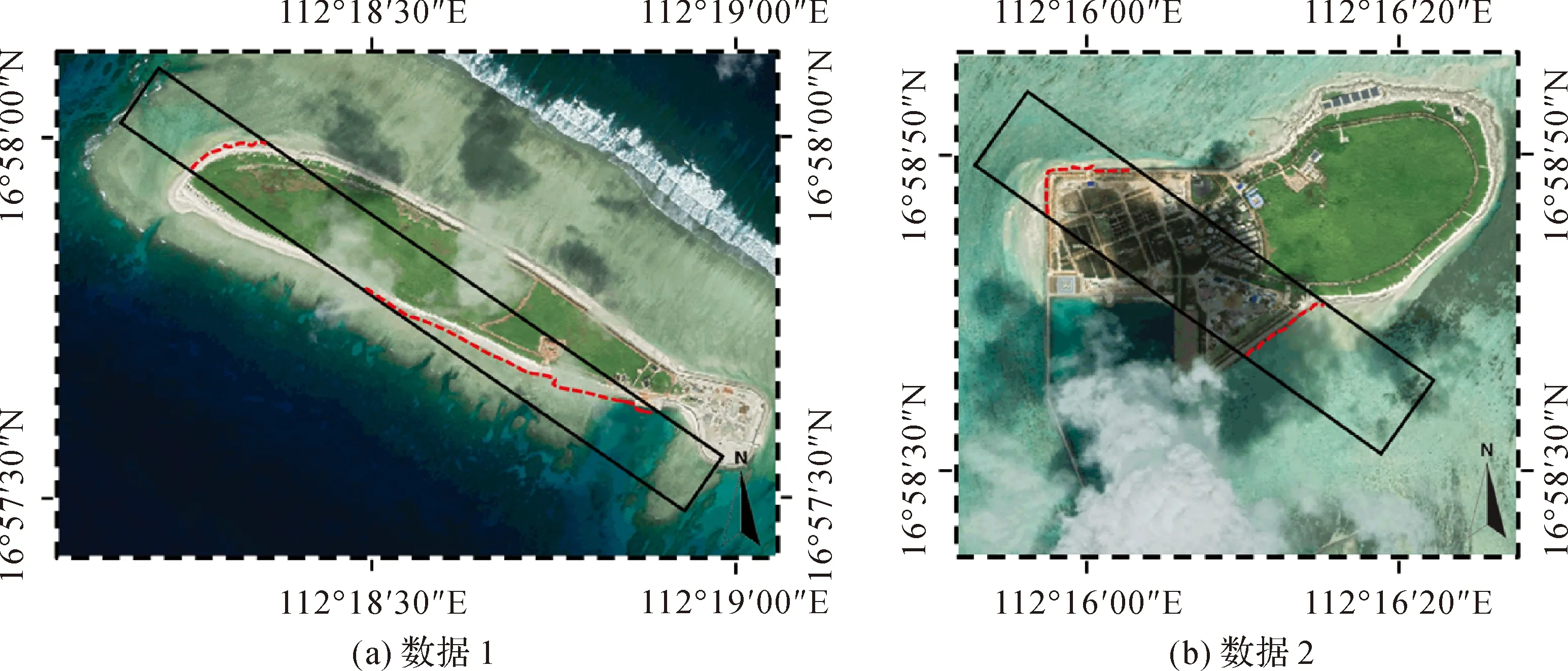
图6 试验区域Fig.6 Study area
2.2 初分类试验
对数据1和数据2的实测波形数据进行首末回波信号检测,然后利用POS和码盘数据依据点位计算模型生成首末回波点云,再建立并拟合首次回波点云的高程直方图,试验结果如图7和表4所示。由图7可知,虽然在试验数据中陆域波形帧数多于水域波形,但水面点依然能够在高程直方图上呈现一个显著的波峰,且可以被高斯函数较为准确地拟合,其中虚线为高程区间(μ-3σ,μ+3σ),表示在初分类中估计的测区水面高程浮动范围。在表4显示的拟合参数中,A表示水面点高程频率峰值,数据1相较于数据2更大是因为水域波形在数据1中所占比例更高;μ表示测区的MWLE,数据1和数据2之间相差约0.2 m,说明水面高程在不同区域具有较为明显的差异,虽然局部范围内水面高程的变化相对较小,但高程变化对海陆回波分类的影响是不可忽略的;σ可用于估计将μ作为测区内水面点高程产生的误差,由于数据1中的岸线更长且海岸坡度变化较缓,因此σ相对更大。
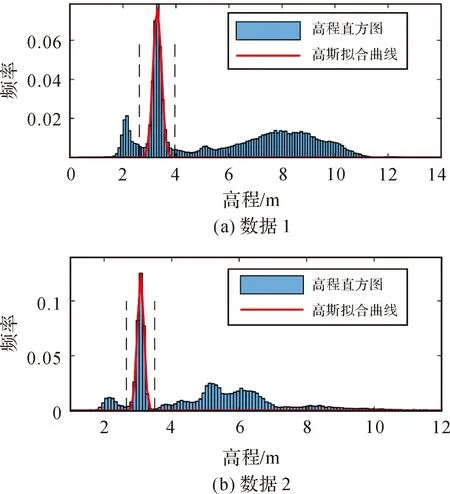
图7 高程直方图拟合结果Fig.7 Results of elevation histogram fitting

表4 高程直方图拟合参数
初分类的目的是依据点云高程特征在保证分类结果可靠性的前提下尽可能多地区分海陆回波。由式(4)可知,通过调节阈值T可以控制初分类的结果,在不同T的取值下进行初分类试验,并统计出现错分的回波数目和未定回波的数目,结果见表5。由表5可知,数据1和数据2试验结果的变化趋势基本一致,随着T的增大,错分数逐渐减少,未定数逐渐增加。当T=0时,表示仅以点位高程进行海陆分类,此时数据1的错分数高达1084个,数据2仅有70个,说明海陆分界线高程与μ不符是产生错分的主要原因。当T从2σ变化至3σ错分数明显减少,数据1接近个位数,数据2降至0,而当T从3σ变化至4σ,错分数变化微弱但未定数大幅增加。因此本文将T设置为3σ,既保证了初分类结果的可靠性,又较大程度减少了未定回波的数量。
2.3 未定回波分类试验


表5 初分类阈值设置分析
试验结果如图8所示,其中分类精度仅统计了T=3σ时未定回波的分类结果,特征提取时间是处理100 000帧波形所用的总时长。通过对比分类精度可以发现,利用点云高程特征分类(模型1和模型2)精度虽然最高可达88.78%,但由于信号检测精度易受环境因素的影响,采用不同通道波形处理不同数据的表现不稳定;模型3和模型1一样仅使用了近红外通道的特征,但模型3的精度略高于模型1,说明对于未定回波的分类波形特征相比点云高程特征更加可靠;模型4和模型5利用了绿光通道波形的高斯分解特征,其中没有近红外辅助的模型4分类精度较低,而加入INIR的模型5分类精度明显提高,普遍优于模型1—模型3;本文方法采用的模型6虽然仅使用了绿光通道的波形特征,但依然取得了较好的分类结果,在对数据1的分类中表现突出,精度显著高于模型1—模型5,在对数据2的分类中精度略低于模型2,这可能是由于数据2中训练样本数较少且存在少量错分样本导致模型的精度降低,增加INIR后分类精度可进一步提高(模型7)。在效率方面,模型1和模型2的特征提取仅涉及信号检测,所需时间最少;模型3、模型6和模型7需要在信号检测后进行一些统计计算,所需时间稍有增加;模型4和模型5在对波形进行高斯分解时存在迭代计算,因此所需时间最长。

图8 不同特征下分类模型的性能分析 Fig.8 Performances analysis of the classifiers with different features
总的来看,以点云高程特征进行未定回波分类的优势在于效率高,且适用于坡度较陡的人工海岸(数据2),但对自然海岸(数据1)的分类不如采用波形特征;近红外信号饱和特征的分类结果比较稳定,但不能达到很高的分类精度;绿光通道波形分解特征在分类时必须有近红外通道波形特征的辅助才能取得较好的分类结果,此外特征提取的效率较低;相比之下,本文所采用的绿光通道波形统计特征在没有近红外通道辅助的条件下就可以达到平均91.59%的分类精度且计算效率较高,若系统配有近红外激光器则分类精度可进一步提高至94.33%。图9为本文方法的最终分类结果与初分类结果的对比,可以看到位于海陆交界处的回波大多无法根据高程特征完成分类,而未定回波分类能够基于绿光通道波形特征准确地区分这些高程值相近的海陆回波,改善初分类结果。
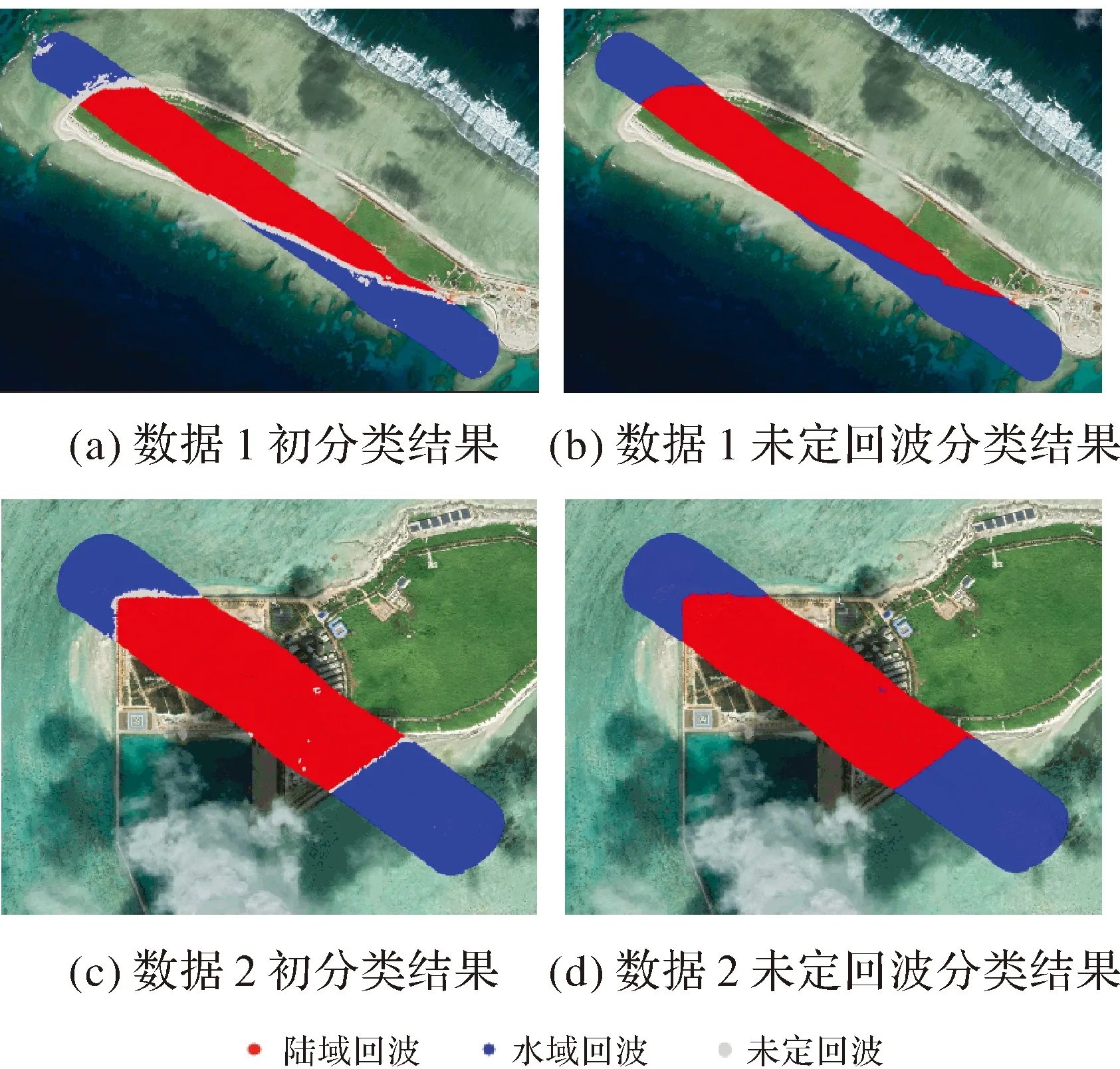
图9 未定回波分类结果Fig.9 Results of the undefined waveforms classification
2.4 分类方法对比分析
为进一步检验本文方法的性能,试验选取了4种具有代表性的海陆回波分类方法与本文方法进行对比,包括以近红外信号饱和特征作为分类依据的近红外饱和法[3],根据近红外信号生成的点云实现海陆回波分类的点云特征法[11],利用近红外和绿光通道波形特征的波形统计特征法[8],对绿光通道波形高斯分解再加上近红外通道回波信号强度约束的波形分解特征法[9],以及没有近红外通道辅助的本文方法。
表6统计了不同海陆回波分类方法的分类结果,图10和图11展示了海陆交界处各方法的分类结果。近红外饱和法利用了水体对近红外的强吸收性,能够较好地区分水体与沙质滩涂、植被,但分类时仅考虑了回波信号的强度信息,没有关注波形能量分布等细节特征,有时会把道路、屋顶误判为水体(图10(c)、图11(c)),分类效果取决于阈值的设置,需要经过多次试验才能确定。点云特征法对不同区域的分类效果相差比较大,对于海岸坡度明显的区域可以达到较高的分类精度,但在海岸坡度变化较缓的区域由于缺少波形信息的约束,自动确定的分类阈值可能与实际的海陆分界线不符导致分类精度较低,而本文方法在海陆交界处是基于波形特征分类的,不受点云生成误差和海岸线高程变化的影响,此外因近红外激光无法穿透水体只能获取水面点云,在波浪的影响下一些水域回波可能被误分(图10(d)),而本文方法提取了绿光通道的首末回波信号,对于水域回波同时包含了水面和水底信号的高程特征,因此即使水面信号位置受到了波浪的影响也可以依据水底信号实现正确分类。波形统计特征法可以准确判断大部分回波的海陆属性,分类精度与本文方法接近,该方法是利用波形特征对整个区域的回波进行分类,因此特征提取方法要顾及整个区域的回波波形情况,少量的异常波形可能导致特征提取的不准确进而产生错分,而本文方法仅利用波形特征处理海陆交界处的未定回波,在高程条件的限制下没有复杂、多样的波形形状,从而保证了波形特征提取的可靠性,且由于波形构成简单,本文方法可以利用高程特征自动建立训练样本集而无须人工采集样本。波形分解特征法虽然阈值是自动确定的,但精度略低于波形统计特征法,这是由于该方法所采用的特征提取算法更加复杂,在对整个区域回波进行处理时更易受到异常波形的影响,说明特征提取的可靠性是海陆回波分类的关键。
本文方法在特征提取上综合了点云特征法和波形统计特征法的优势,对于远离海陆交界处的回波,依据点云高程特征分类避免了异常波形的影响,对于海陆交界处的回波,利用波形特征分类避免使用不准确的高程阈值而产生错分,提高了特征提取的可靠性;在分类器训练中利用高程特征自动建立了训练样本集,无须人工采集样本或设置阈值,实现了自动分类。相比传统方法,本文方法在没有近红外通道波形辅助的条件下就可以获得较为准确的分类结果,总体分类精度平均可达99.82%,适用于各种类型ALB系统的数据处理,且对于大部分回波的分类只需要检测首末回波信号而不需要提取波形细节的特征,减少了因波形特征提取不准确而产生的错分现象,同时提高了分类的效率。

表6 不同海陆回波分类方法性能分析
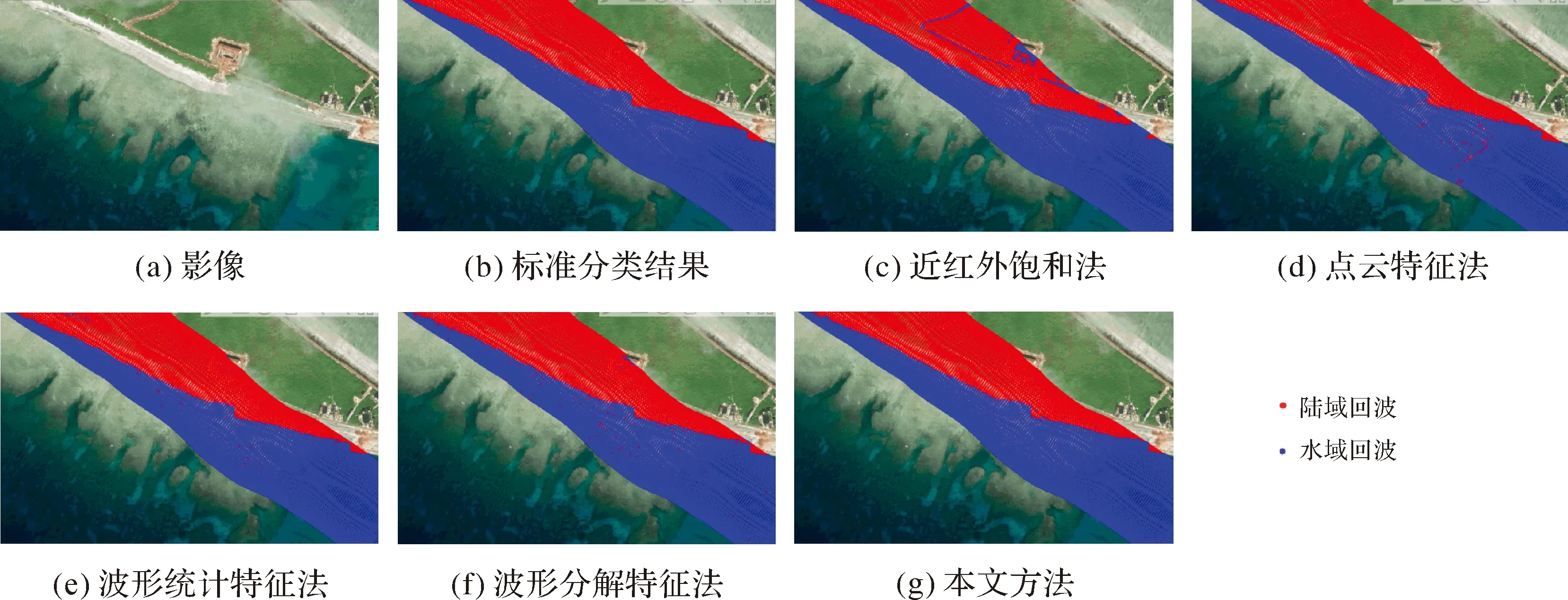
图10 数据1海陆回波分类结果Fig.10 Sea-land waveform classification results of data 1
图11 数据2海陆回波分类结果Fig.11 Sea-land waveform classification results of data 2
3 结 论
ALB系统可同时进行海陆观测,但水域和陆域回波具有不同的波形处理方式和点位计算模型,因此,海陆回波分类的精度影响着信号检测和点云生成的精度。针对现有海陆回波分类方法依赖辅助信息、自动化程度低等问题,本文提出了一种单频机载激光测深海陆回波自动分类方法。该方法通用性强,不需要同步影像、近红外通道波形等辅助信息,仅利用绿光通道回波信号的点云高程特征和波形特征即可自动实现高精度的海陆回波分类。通过试验将本文方法与4种近红外通道辅助法进行对比发现:本文方法有效综合了点云高程特征和波形特征分类的优势,对远离海陆分界线的复杂多信号回波利用点云高程特征进行分类,减少了因波形特征提取不准确产生的错分现象,对海陆分界线附近的回波依据波形特征分类,避免了海岸线高程变化对分类结果的影响。
本文方法也存在着一定的局限性:由于大部分的回波信号是依据点云高程进行分类的,对于一些高程异常的地区,如低于海面的深坑和高于海面的河流、湖泊可能还需要人工干预;此外,在波形特征提取时未考虑航高、系统接收方向等因素对回波信号强度的影响,在特征提取前对波形进行辐射校正有望进一步提升海陆交界处回波的分类精度。
