精确Grover 量子搜索算法概述
2022-05-28李冠中李绿周
李冠中,李绿周
(中山大学计算机学院 广州 510006)
求解无序数据库搜索问题的Grover 量子搜索算法[1]于1996 年被提出,相对于经典算法有平方级别的加速。自问世以来,得到广泛应用,如被用于求解最小值查找问题[2]、串匹配问题[3]、量子动态规划[4]及计算几何问题[5]。不仅如此,针对Grover算法本身的扩展也不少,如量子振幅放大[6]、图上量子游走搜索[7]、不动点量子搜索[8-9]及本文要介绍的精确Grover 量子搜索算法[6,10-11]。
1 原始Grover 算法及其缺陷
无序数据库搜索问题可以抽象地描述如下,在大小为N=2n的 无序数据库中,有M个元素是符合要求的,这些目标元素通过一个函数f:{0,1,···,N−1}→{0,1}来 标识:若编号为x的元素为目标元素,那么f(x)=1; 否则,f(x)=0。假设有一个可以识别搜索问题目标元素的黑盒:要判断编号为x的 元素是否为目标元素,只需要将编号x输入黑盒,它就会输出f(x)的值。现在希望以尽可能少的黑盒调用次数(称之为查询复杂性),找出一个目标元素。
在量子计算中,实现函数f(x)的黑盒的作用效果是一个酉操作Of,其在计算基态上的作用效果为:


2 精确Grover 量子搜索算法
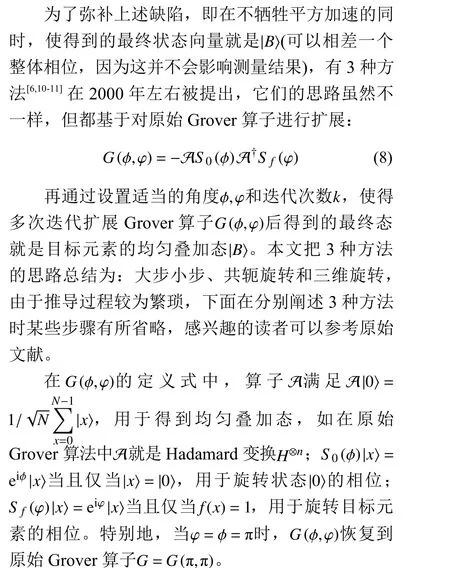
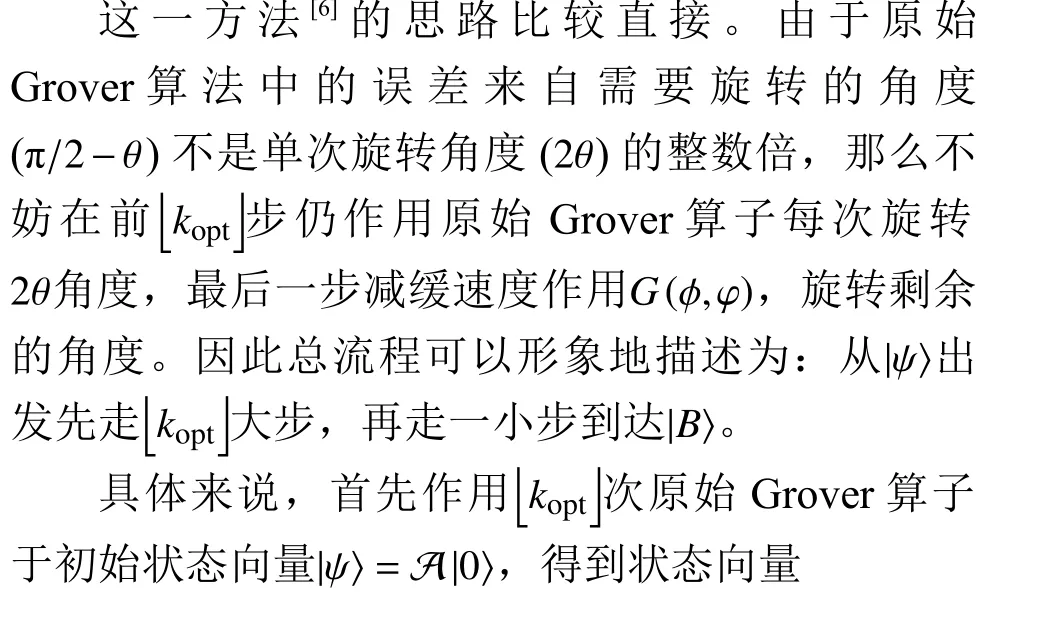
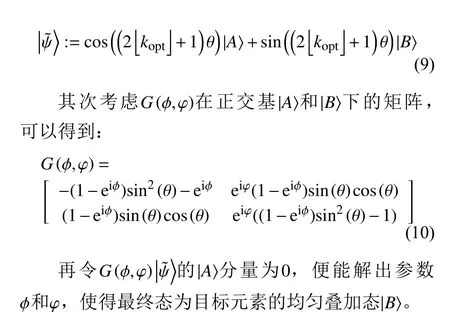
2.1 大步小步
2.2 共轭旋转

2.3 三维旋转
这一方法[11]的思路为:把G(ϕ,ϕ)在 正交基 |A〉和|B〉下的二维酉矩阵对应到相应Bloch 球中的三维旋转,再通过选取适当的角度 ϕ和旋转次数k,使得Gk(ϕ,ϕ)|ψ〉在 该Bloch 球面上与 |B〉重合。
具体来说,由于任意二维酉矩阵都可以写成下式右边的形式,因此令
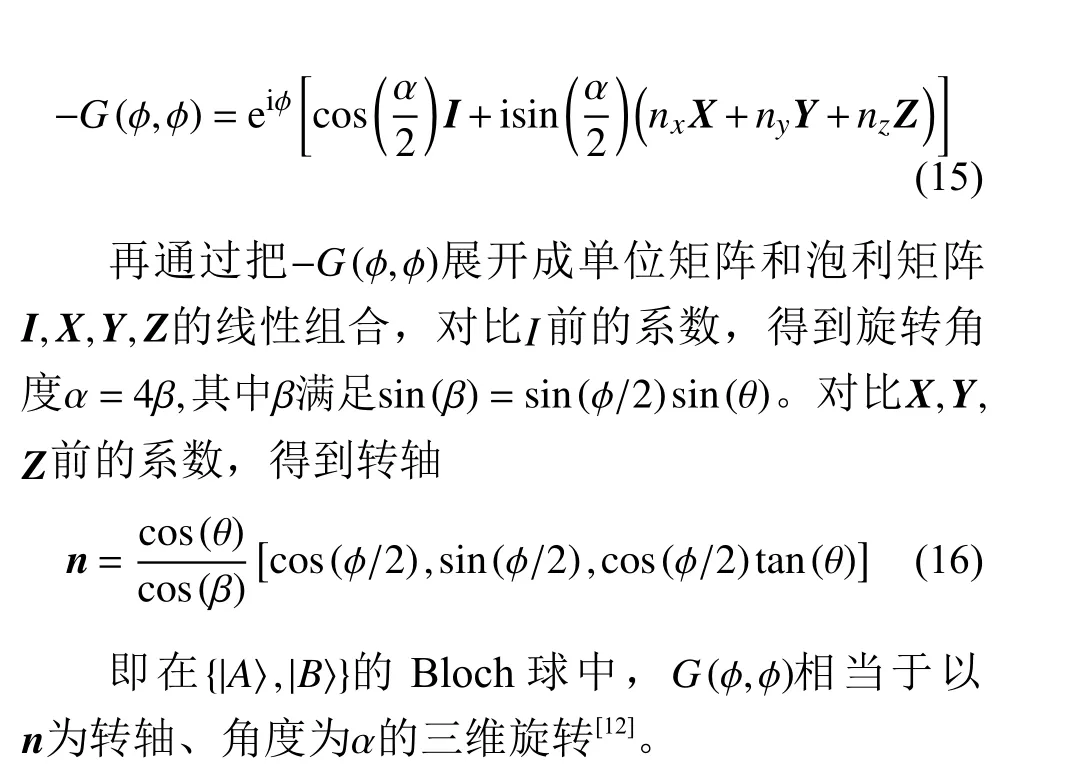
由 于 初 态 |ψ〉在Bloch 球 中 对 应 的 向 量 为s:=[sin(2θ),0,−cos(2θ)], 而算法最终欲得的 |B〉对应的向量为t:=[0,0,1], 故 〈n|s〉=〈n|t〉 。 这说明s和t在Bloch 球面以n为轴的同一个的圆上,所以确实可以通过绕固定轴n进行多次旋转,把s转 到t。为了确定参数 ϕ和旋转次数k, 记r为s和t在n上的投影,如图1 所示,解析几何计算表明s−r和t−r之间的角度为 ω=π−2β。根据之前的推导,每作用一次G(ϕ,ϕ)相 当于绕转轴n旋 转 α =4β, 而 ω是所希望的总旋转角度,因此令ω =kα 可以求出 ϕ 与k应该满足关系式:


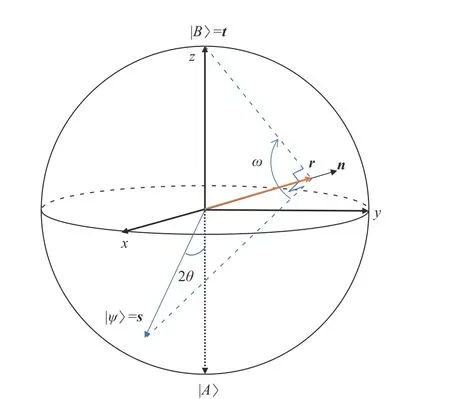
图1 在{ |A〉,|B〉}的 Bloch 球中,G (ϕ,ϕ)的多次作用相当于把初态 s 绕 转轴 n旋 转到目标元素的均匀叠加态t

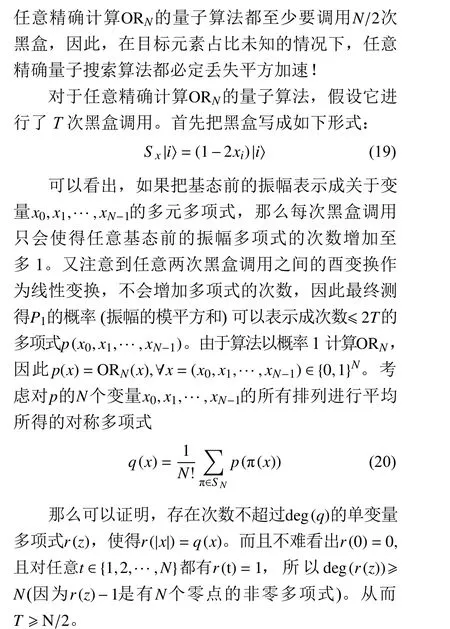
容易验证,图2 和图3 分别展示了S f(φ)和Sψ(ϕ)的电路实现,其中最后一行为辅助qubit。注意到S f(φ) 需 要调用两次黑盒Of,因此表1 中后两种方法的黑盒调用次数是原始Grover 算法的两倍,不过这并不影响平方加速的数量级。
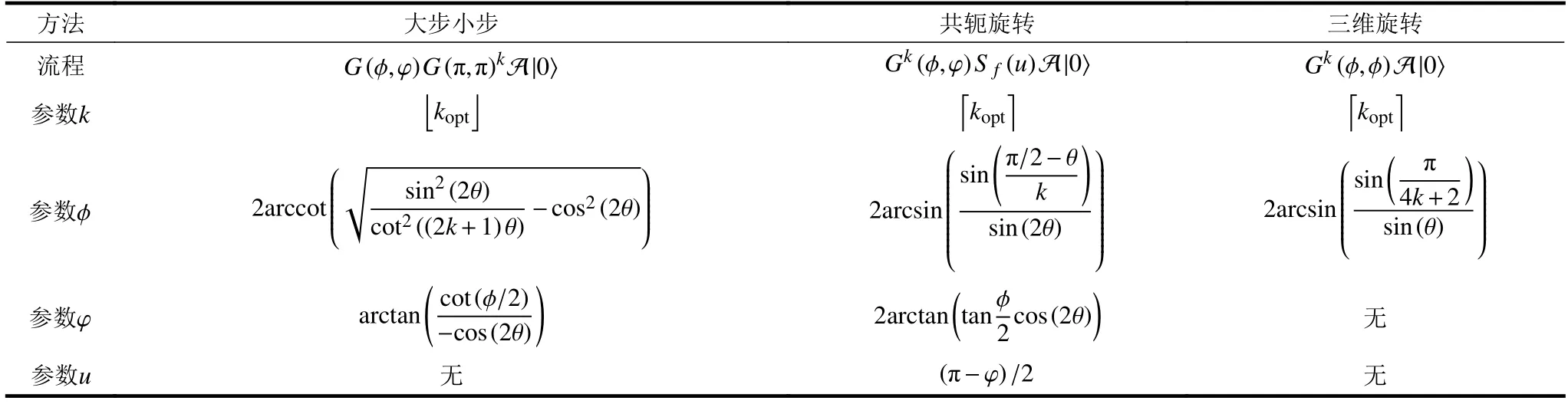
表1 3 种精确Grover 量子搜索算法
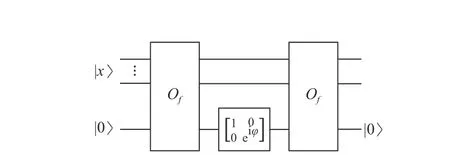
图2 S f(φ)的 电路实现,其中Of|x〉|b〉=|x〉|b⊕f(x)〉

图3 S ψ(ϕ)的电路实现
3 精确量子搜索的查询下界
3.1 目标元素占比未知时的查询下界
3.2 目标元素占比已知时的查询下界
在目标元素的占比已知的情况下,利用文献[14]的quantum angle 方法,并把它直接地扩展到多个目标元素的情形(即文献[15]文末提及的选取⎿N/M」个“不相交”数据库的思路),可以证得精确量子搜索的查询下界为

4 结 束 语
本文梳理了3 种精确Grover 量子搜索算法,给出了算法流程、参数设置以及背后的几何直观,并指出它们都依赖于目标元素的占比,由此为出发点,说明了算法的最优性:对于目标元素占比已知的情况,3 种精确Grover 量子搜索算法已经达到最优;而对于目标元素占比未知的情形,精确量子搜索算法相比经典算法没有加速。因此本文对精确量子搜索算法给出了较为完整的概述。
