基于自归一卷积特征提取的故障诊断研究
2022-05-27常梦容王海瑞王椿晶
常梦容 王海瑞 肖 杨 王椿晶
(昆明理工大学信息工程与自动化学院)
传统的轴承故障诊断方法主要依赖于一些手工的特征提取器,如时域统计分析、频域统计分析、小波分析、短时傅里叶变换及希尔伯特黄变换等[1]。通过上述方法,人工提取振动信号的某些时、频、时频域特征,用于轴承状态识别。 这类传统的故障诊断方法虽然取得了一定的进展,但通常需要一定的专家知识,泛化性能较差。 特别是在当今高精度、智能化、大数据的要求下,它们很难满足实际工业的需求。 近年来,随着深度学习在图像识别、语音识别及语义分析等领域的成功应用,基于深度学习特征提取的智能故障诊断能够更好地解决上述问题, 实现更加高精度、较快收敛速度的故障检测, 并逐渐成为研究热点。卷积神经网络 (Convolutional Neural Networks,CNN)具有稀疏连通性、共享权值的特点,能够更好地提取深度特征,抑制网络过拟合[2]。 因此,一些学者利用CNN进行研究。 如燕志星等使用CNN进行特征提取, 并用GWO-SVM模型进行故障诊断[3];鄢仁武等使用小波时频图和CNN进行断路器故障诊断[4];吕恩辉等使用反卷积特征提取的深度卷积神经网络学习提高图像分类精度[5];沈飞等使用改进卷积神经网络的高光谱图像特征提取方法在高光谱数据集中获得良好的分类效果[6]。但是上述论文中都存在需要进行批归一化、梯度弥散等问题。 由此笔者在传统卷积神经网络的基础上提出将自归一卷积神经网络(SNN)特征提取与基于改进萤火虫算法优化的支持向量机(IFA-SVM)结合用于滚动轴承故障诊断。 笔者将缩放指数线性单元(SELU)应用于卷积神经网络中形成自归一卷积神经网络,使其具有自归一属性,并且方差稳定性好,避免了批归一化、梯度弥散及梯度爆炸等问题。 实验结果表明,与传统的特征提取方法和传统CNN相比,笔者所提方法具有较高的识别率和较快的收敛速度。
1 自归一卷积神经网络
1.1 卷积神经网络
卷积神经网络采用了普通神经网络的结构,是一个因生物得到启发的前馈神经网络[7]。 简单的卷积神经网络结构主要由卷积层、池化层(也叫下采样层)、全连接层和最后的输出层构成。
1.1.1 卷积层(C层)
CNN利用不同大小的卷积核将输入图像卷积到C层。 添加偏置后,通过激活函数提取输入图像的抽象纹理特征,进一步实现特征增强[8]。
卷积层的计算式为:
1.1.2 池化层(S层)
池化层通常位于C层之后, 在卷积神经网络中,池化层对输入的特征图进行压缩,一方面使特征图变小,简化网络计算复杂度,另一方面进行特征压缩,提取主要特征[9]。采用池化层可以忽略目标的倾斜、 旋转之类的相对位置的变化,以提高精度,同时降低特征图的维度,并且在一定程度上可以避免过拟合, 通常分为最大池化、平均池化和随机池化。 笔者采用具有平移不变性特征的最大池化方法对输出特征映射进行降维处理。
1.1.3 全连接层(FC)
全连接层在整个卷积神经网络中起到分类器的作用[10]。 经过多次交替的卷积和池化操作,最终的全连接层可以获得输出类别或者输入样本的概率。 在FC层中,第l层所有神经元节点都连接到l-1层的所有输出节点,其数学表达式为:
其中,yl为FC层中第l层的输出,xl-1为第l-1层展开的一维特征向量,ωl为第l层的加权系数,bl为第l层的偏差。 在每一个C层或FC层之后添加一个dropout operation(一种正则化技术),以增强所设计的CNN模型的泛化能力,避免模型训练时的过拟合[11]。
1.2 自归一卷积神经网络
SNN在CNN的基础上将缩放指数线性单元(Scaled Exponential Linear Units,SELU)引入了自归一属性,这样可以在提高卷积神经网络鲁棒性的同时避免梯度消失和爆炸问题[12],其结构如图1所示。
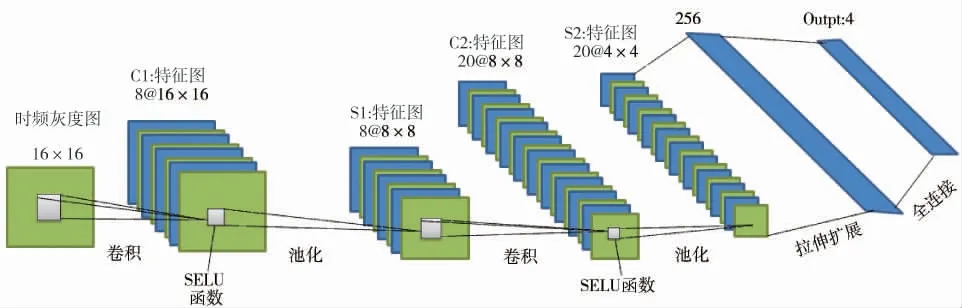
图1 SNN结构
SELU激活函数表达式为:
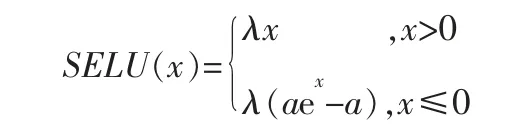
在文献[12]中证明了当参数λ→1.050 7,a→1.673 3时, 神经元的输出接近零均值和单位方差,通过前向传播输出的结果也接近零均值和单位方差[13]。
SELU激活函数的主要特性是,在负净输入时抑制方差,在正净输入时增加方差。 净输入离零越远,方差衰减越强;净输入越接近零,方差增加越强。
2 IFA-SVM原理
2.1 萤火虫算法(FA)
萤火虫算法是一种新颖的群智能优化算法,灵感来自于萤火虫的行为,它们用闪光来吸引潜在的交配对象或猎物[14]。 与传统的确定性算法(如梯度法和最小二乘法)相比,萤火虫算法操作更加方便,不依赖于优化问题的数学本质,具有更高的效率,并显示出更快的计算速度[15]。 该算法目前已得到广泛应用。
在FA中,搜索空间中的每个可行解都与萤火虫个体相似;萤火虫个体持续相互吸引和移动的过程类似于搜索和优化的过程;萤火虫位置的可取性类似于优化目标函数的适应度,萤火虫个体为生存而奋斗的过程类似于优化的迭代过程。 搜索和优化过程与两个参数有关——萤火虫的亮度和吸引力。
萤火虫相对亮度的计算式为:
其中,I0表示萤火虫距离为零 (r=0) 时的亮度, 也是最亮萤火虫的亮度;γ表示光吸收系数,可设置为常数;rij表示萤火虫i和j之间的距离。
相互吸引度β(rij)的计算式为:
其中,β0表示最大吸引度,即r=0处的吸引度。
萤火虫的亮度取决于它的位置,这与目标函数的值类似;萤火虫的亮度越高,其位置越好,这与目标函数的最优值类似。 萤火虫的吸引力与它的亮度有关;亮度越高的萤火虫对其他萤火虫的吸引力越高; 对于空间中的任意两只萤火虫来说, 较暗的那一只会被较亮的那一只所吸引,从而向较亮的那一只移动。 在这两个因素的相互作用下, 萤火虫往往会聚集在最明亮的萤火虫周围。 这与目标函数的最优化类似。
萤火虫位置更新公式如下:
xi(t+1)=xi(t)+β(xj(t)-xi(t))+α(rand-0.5)
其中,xi、xj表示两个萤火虫的空间位置,α为步长因子,rand为[0,1]上服从均匀分布的随机因子。
2.2 优化萤火虫算法(IFA)
改进1使用最小吸引度改进萤火虫算法的吸引度, 将原本是指数型的吸引度改成分式型,减少计算量,提高运算效率,公式如下:
其中βmin为最小吸引度。
改进2引入指数递减型惯性权重到位置更新公式中,在权重公式中加入随机扰动项进行自适应调整,公式如下:
xi(t+1)=ω(t)xi(t)+β(xj(t)-xi(t))+α(rand-0.5)
权重ω(t)计算公式如下:
其中,t为当前迭代次数, 参数ωmax=0.8,ωmin=0.2,T=200,使得ω(t)∈(0,1)。
引入指数递减型惯性权重改进的方法,可以避免萤火虫飞行速度过快,错过极值点或在极值点反复振荡的问题。
2.3 IFA-SVM参数优化
笔者提出的IFA-SVM的核心是使用优化的萤火虫算法优化支持向量机的惩罚系数c和核函数半径g,通过选择出最佳的层c、g组合,来提高SVM的分类准确率和分类性能,具体流程如图2所示。
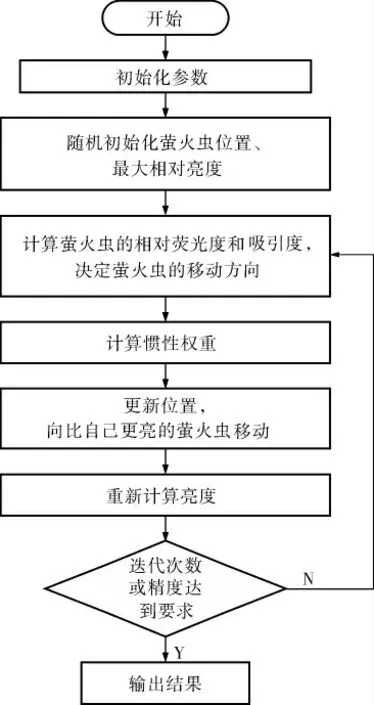
图2 IFA-SVM参数优化流程
3 滚动轴承故障诊断实验
3.1 数据集的构造及描述
笔者采用的振动原始数据集来自美国凯斯西储大学的开放数据。 在电机驱动端SKF6205上进行故障诊断,实验数据分别取了正常、滚珠故障、外圈故障和内圈故障状态,采用电火花加工方式制造单点故障来模拟轴承故障, 损伤尺寸为0.18 mm。采样频率为12 kHz,转速为1 797 r/min,将采集到的原始振动信号进行分割,每个样本包含700个采样点。 每种状态下的样本数量为130个,4类故障总共520个数据。 首先从4类故障中每类随机抽取100个作为训练集,剩下的120个数据作为测试集,两个互斥数据集作为本次实验的数据来源。
轴承故障类型描述见表1。
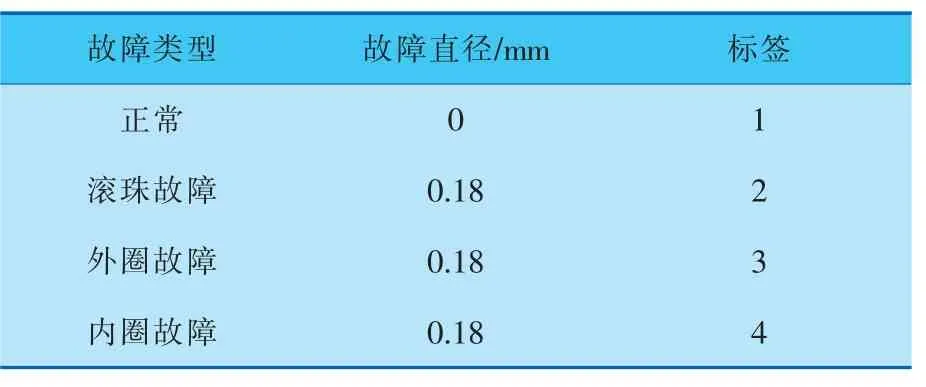
表1 滚动轴承故障类型
3.2 特征预处理
特征预处理步骤如下:
a. 将520个数据进行700点分段和短时傅里叶变换,提取原始故障信号的时频图和时频分布图。
b. 将得到的时频图去能量条、空白、坐标和文字。
c. 将时频图进行灰度化处理, 图片大小为1141×824,由于图片维数过大,必须对图片进行压缩处理,压缩后的图片大小为16×16。
3.3 特征分析
每一种故障对应于特定的时域波形图,而其时域分布又与波形图有较大的相关性。每种故障之间都有较大区别,因此研究振动信号时频图和每类故障间的关系,将是本次实验的主要目的之一,并且运用时频图进行特征提取,避免了人为特征提取而产生的误差。 振动状态时频对比如图3所示。
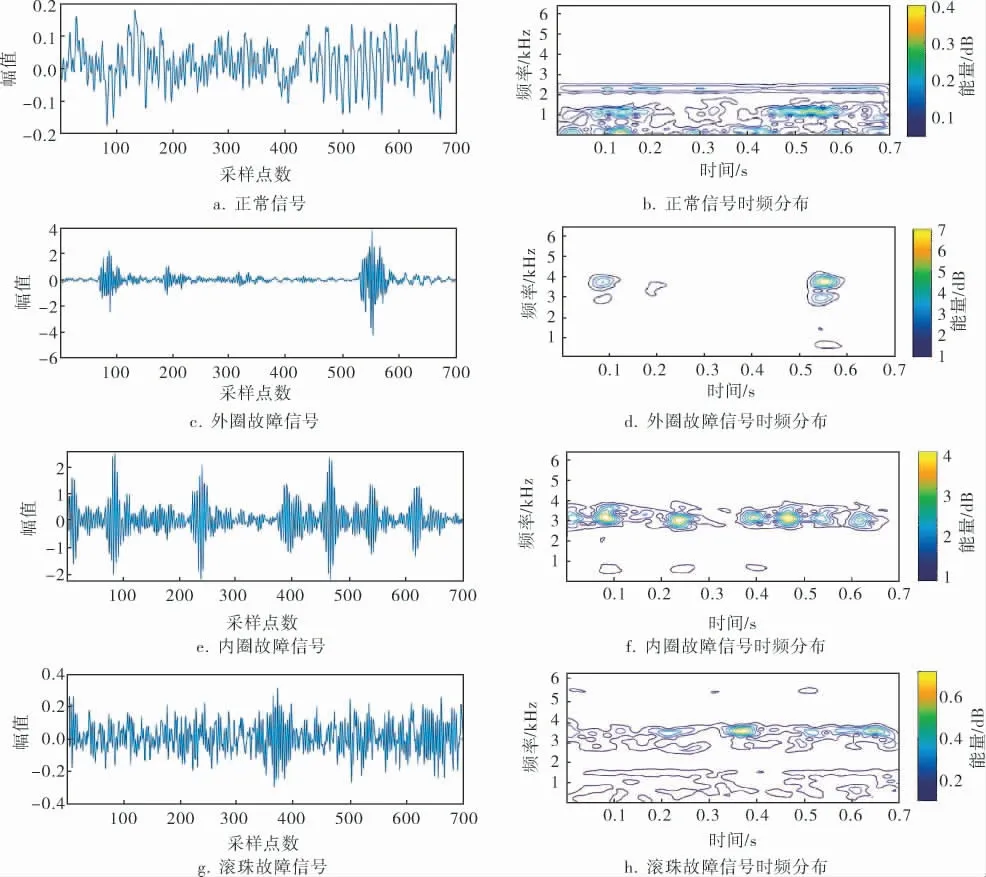
图3 振动状态时频对比
由图3可以看出,正常信号相比其他信号,其能量主要集中在2 000 Hz及以下的低频部分,而3类故障特征的能量集中在3 000~4 000 Hz之间,具有明显对比性。 并且正常信号处于连续状态,没有明显冲击信号,虽然滚珠故障信号也处于连续状态,但由其时频分布图可知,滚珠故障信号存在一部分冲击信号且能量大部分集中在3 000~4 000 Hz之间。 外圈故障和内圈故障则存在明显的冲击信号,其中外圈冲击次数较为稀疏,内圈冲击次数多于外圈,并且两种信号与正常和滚珠故障存在明显区别。 因此时频对比有较大可分性,本实验利用卷积神经网络在图像识别方面的良好表现以及一定程度的平移、缩放、扭曲不变的优点,将缩放指数线性单元(SELU)运用于卷积神经网络,形成自归一卷积神经网络用于时频图像特征提取。
3.4 网络结构以及参数说明
笔者所用SNN的结构如图1所示。输入特征图时频灰度图的大小为16×16, 卷积层与池化层交替组成隐层,第1层卷积核大小为5×5,卷积核个数为8,输出32维,第2层卷积核大小也是5×5,卷积核个数为20,输出64维。 池化层采样方式为最大化采样,即对特征图邻域内特征点取最大。 区域大小为2×2且区域不重叠,分类器选择SVM,激活函数选择SELU函数,采用adma优化目标函数。实验平台的配置如下:Window 10 64位操作系统,CPU为i5-3470 @ 3.20GHz,程序运行环境为MATLAB2020和Python3.8,训练参数如下:
SNN参数
迭代样本数量 50
迭代次数 3 000
学习率 1.673 26
萤火虫参数
萤火虫数量n 20
最大迭代次数 100
步长因子α 0.25
最小吸引度βmin0.2
光吸收系数γ 1
3.5 算法性能分析
为了分析SNN的特征提取效果,对输出的256维特征数据随机抽取4维进行聚类分析, 分析效果如图4所示, 从图中可以看出,SNN提取的向量聚类后,每一类之间边界清晰,基本不存在交叉混叠现象,特征分布紧凑,证明SNN提取的特征能够表现故障特征,有利于最终实验的分类。
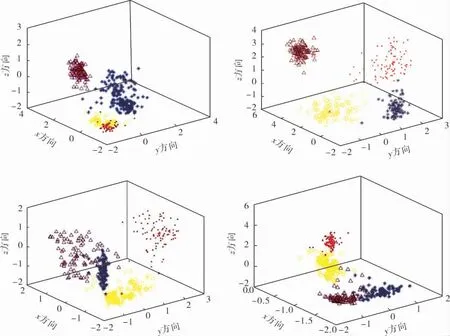
图4 特征聚类图
为了进一步说明SNN的鲁棒性和结构的高效性, 笔者将传统的特征提取方法与SNN特征提取方法在同等条件下进行对比。 相关方法包括:时域特征(TDF)+FA-SVM、时域特征(TDF)+IFASVM、CNN +FA-SVM、CNN +IFA-SVM、SNN +FASVM和SNN+IFA-SVM,6种方法性能比较见表2。
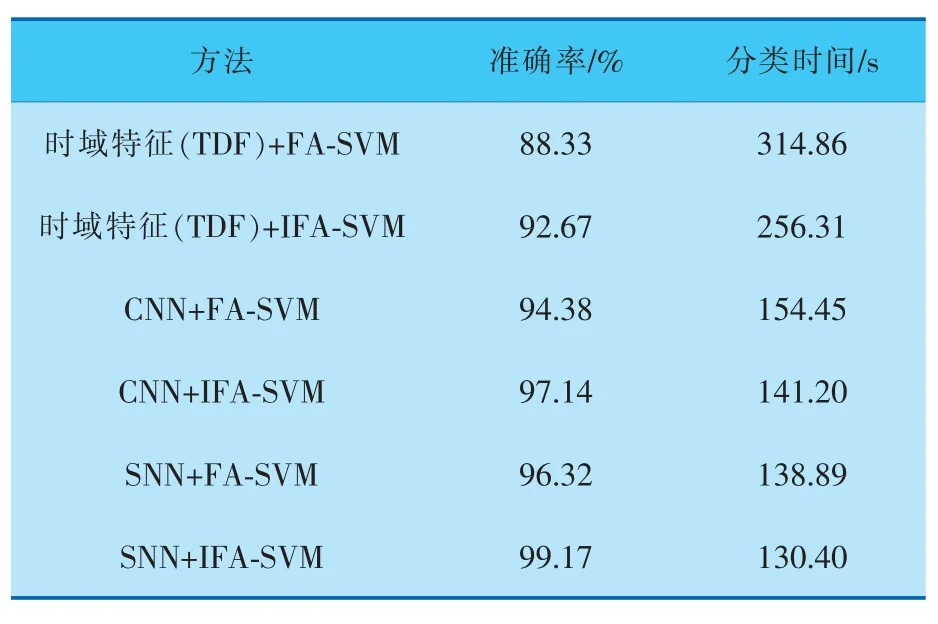
表2 6种模型性能比较
由表2可以看出, 在同等条件下,SNN+IFASVM的准确率最高,为99.17%,时域特征(TDF)+FA-SVM表现不是很好,准确率为88.33%。 对比时域特征 (TDF)+IFA-SVM和时域特征 (TDF)+FASVM可以看出,在传统特征提取方式下,通过优化萤火虫算法,不但提高了整个模型的分类准确率,而且分类时间也明显减少,由此可以表明,萤火虫优化算法效果显。 CNN+IFA-SVM的分类准确率为97.14%, 低于SNN+IFA-SVM, 同时分类时间从141.20 s减少到了130.40 s,说明SNN的收敛速度高于CNN。 对比传统的特征提取、CNN特征提取和SNN特征提取可以看出, 在相同的条件下,3种方法的分类准确率为SNN>CNN>时域特征(TDF),由此可见,SNN在特征提取中有较强的实用性。
进一步验证6种方法的收敛速度, 记录每一次迭代的结果并绘制折线图如图5所示。
从图5可以看出,相较于其他模型,SNN+IFASVM收敛速度为全程最高,仅需20次就达到最终收敛效果。
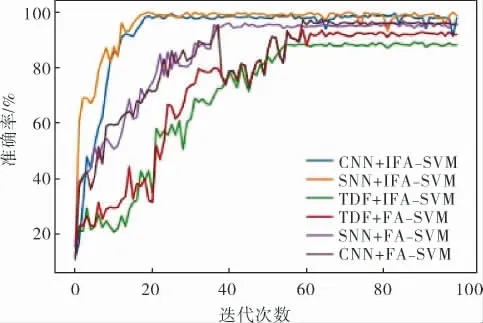
图5 6种模型迭代图
3.6 实际值与预测值比较
采用SNN+IFA-SVM方法得到的实际分类结果和预测分类结果如图6所示。 可以看出,在滚动轴承的4种状态下,SNN+IFA-SVM基本都取得了较高的准确率,状态1、3、4准确率达到了100%,状态2只有1个没有正确分类。 综上所述,SNN+IFA-SVM具有较高的预测精度和较好的鲁棒性,工程应用价值高。
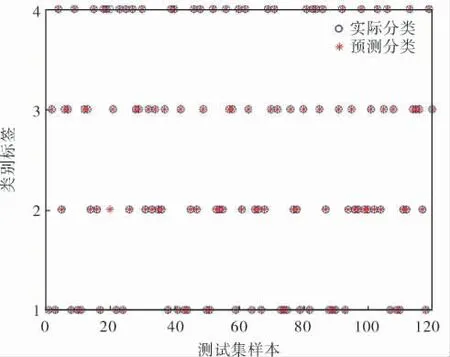
图6 SNN+IFA-SVM测试集实际分类和预测分类图
4 结束语
将缩放指数线性单元运用于卷积神经网络中形成自归一卷积神经网络,使其具有自归一属性,并且方差稳定性好,避免了批归一化、梯度弥散及梯度爆炸等问题。 首先将原始信号进行短时傅里叶变换提取时频图,将时频图进行灰度化处理之后再输入到SNN网络进行特征提取, 能更好地得到信号的特征。 最后应用改进萤火虫算法(IFA)优化SVM进行故障分类。 实验结果表明,与传统的特征提取方法和CNN相比,所提SNN+IFASVM方法具有较高的识别率以及较快的收敛速度。
