基于BDS-3 PPP-B2b服务的实时PPP性能分析
2022-05-26朱恩慧郭海荣李金龙肖浩威
朱恩慧 郭海荣 李金龙 肖浩威 段 然
1 北京卫星导航中心,北京市永丰路5128信箱,100094 2 广州南方测绘科技股份有限公司,广州市思成路39号,510663
2020-07 BDS-3正式建成并开通服务,播发B1I、B1C、B2a、B2b和B3I等5个公开服务信号,为用户提供定位导航授时、精密单点定位、星基增强、短报文通信和中轨搜救等服务。其中3颗GEO卫星在我国及周边地区播发PPP-B2b信号,为用户提供公开、免费的动态dm级、静态cm级定位服务[1-2]。目前关于BDS-3 PPP-B2b服务的实时PPP性能分析研究还处于起步阶段,Tao等[3]对比分析PPP-B2b改正信息与IGS法国空间研究中心的RTS产品表明,PPP-B2b 可在亚洲地区提供稳定的服务,可用性和完整性均比RTS好,在中国区域服务精度可达cm级。Ren等[4]对PPP-B2b改正信息与MGEX最终产品进行比较,研究BDS-3卫星在R、A、C方向上实时轨道精度和钟差误差精度。宋伟伟等[5]针对全球连续监测评估系统测站数据,评估基于PPP-B2b信号的轨道和钟差精度得出,BDS-3轨道产品R、A、C方向精度均值分别为0.1 m、0.31 m、0.3 m,钟差精度均方根的均值为2.26 ns。黄伦文等[6]研究得出,B2b轨道产品R、A、C方向精度分别优于0.07 m、0.33 m、0.24 m,钟差STD优于0.08 ns,静态PPP定位N、E、U方向精度RMS分别达到0.8 cm、1.5 cm、1.6 cm,动态PPP定位精度RMS分别达到3.6 cm、6.0 cm、12.2 cm,可满足导航与位置服务、大地测量等应用服务需求。
基于以上研究,本文利用在北京、成都、拉萨、乌鲁木齐4个地区采集的数据,对基于BDS-3 PPP-B2b改正参数的PPP服务性能进行评估实验。
1 PPP-B2b精密单点定位处理过程
1.1 PPP模型与数据处理策略
BDS-3通过GEO卫星向用户播发实时轨道、钟差和码偏差改正信息,用户结合广播星历和双频伪距、载波观测数据来实现实时PPP。随着PPP-B2b信号接口控制文件(interface ctrol document,ICD)的公布[1],用户可以根据ICD的说明对PPP-B2b信号播发的改正信息进行解析,再配合接收机观测数据和广播星历,即可实现PPP功能[2]。
本文以测站双频观测数据、B1C信号广播星历和PPP-B2b信号播发的改正信息为输入,采用双频无电离层组合模型进行定位解算,对于对流层延迟干分量、相位缠绕、相对论效应、固体潮与海潮、地球自转等误差采用模型进行改正,对于一些难以精确模型化的误差,如对流层延迟湿分量,则作为附加参数进行估计。因此,估计的参数包含测站坐标、接收机钟差、天顶对流层湿分量延迟和无电离层组合模糊度等4类参数,采用Kalman滤波进行参数估计[7-8],具体处理流程如图1所示。
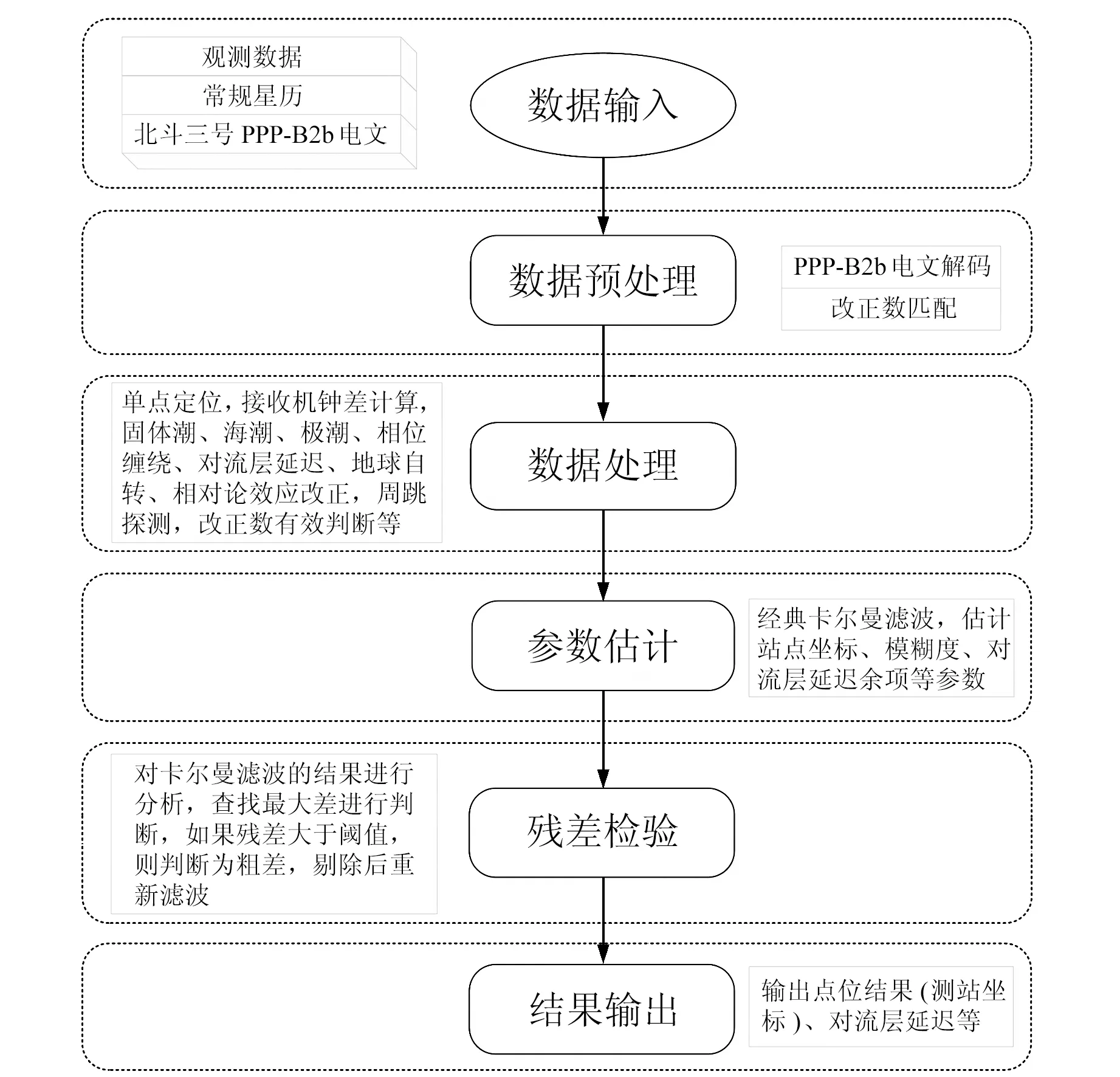
图1 基于PPP-B2b服务的PPP处理流程Fig.1 PPP processing flow based on PPP-B2b service
1.2 与常规PPP处理策略的差异
基于PPP-B2b改正的PPP与常规PPP处理策略相比有2点差异:1)用户通过接收终端获取卫星实时轨道、钟差和码偏差改正信息后,需与广播星历参数结合才可得到最终的精密卫星轨道和钟差;2)基于PPP-B2b改正信息获取的精密卫星轨道参考点为相位中心,在PPP处理中无需进行卫星天线相位偏差改正,而基于IGS产品的常规PPP处理卫星轨道参考点为卫星质心,需要对卫星天线相位偏差进行修正。2种方式的具体对比如表1所示。

表1 PPP-B2b电文与IGS精密轨道、钟差参与处理策略对比
1.3 改正参数匹配性问题
BDS-2导航电文(D1、D2)中定义了数据龄期AOD(age of data),AOD表示卫星星历和钟差参数的外推时间间隔[9],与相应的星历参数无确定的对应关系,存在2组不同星历参数(如连续2h的星历)对应同一个AOD情况,无法通过AOD来识别卫星星历和钟差参数变化。为了保证不同信息类型所播发信息内容的关联性,BDS-3采用数据期卷IOD(issue of data)对信息进行标识,其中IOD SSR表示状态空间描述,IODP表示卫星掩码的数据版本号,IODN表示GNSS下行信号播发的星钟、星历的数据版本号,IOD Corr表示轨道改正数和钟差改正数的版本号。当BDS-3卫星星历和钟差参数变化时对应的IOD参数也会相应改变,且在一段时间内取值唯一[10]。
在使用PPP-B2b电文信息和B1C-CNAV1 广播星历结合进行PPP的过程中,还需要注意改正参数之间匹配性问题。
1.3.1 改正参数与广播星历匹配
BDS-3用户在使用PPP-B2b电文改正信息选择相匹配的广播星历时,通过IODN参数标识PPP-B2b信号所播发星钟、星历的数据版本号,用户可通过PPP-B2b轨道改正信息中的IODN参数选择与改正信息相匹配的广播星历,BDS-3广播星历中的IODC参数与PPP-B2b信号中的IODN参数相对应,而IODC参数会随着广播星历的更新发生变化,由于改正参数IODN存在时间延迟,在广播星历更新的初始几个历元,IODC参数往往与PPP-B2b改正数历元IODN参数标识无法匹配,此时应注意仍采用旧的广播星历IODC参数标识与改正数参数进行匹配,直至PPP-B2b改正参数IODN标识更新。
1.3.2 轨道与钟差改正参数匹配
PPP-B2b改正电文通过IOD Corr参数标识轨道改正数和钟差改正数的版本号,可用该参数对轨道和钟差改正参数进行匹配,仅当钟差改正数的IOD Corr与轨道改正数的IOD Corr相同时,二者方可匹配使用。相比于BDS-3卫星播发轨道误差,卫星钟差精度是制约导航定位精度的主要因素之一。考虑到字节资源、精度要求等因素限制,钟差改正参数的更新频率比轨道改正参数更高,钟差改正数更新频率为6 s,轨道改正数更新频率为48 s,2种改正数大部分时间都是匹配的,钟差改正参数更新而轨道参数不更新或者同时更新的情况较多,但此时2种改正参数还在使用同一个IOD Corr参数进行识别,仍处于匹配状态。仅当钟差改正数进行更新且其IOD Corr发生变化时,轨道改正数和钟差改正数才会从原来的匹配状态变为不匹配,而且所有卫星的IOD Corr通常同时发生变化,这会导致该时间段内的改正信息均无法匹配使用,此时应采用前面与轨道相匹配的钟差改正数进行改正,直至轨道改正参数标识IOD Corr更新完毕。另外,由于轨道参数会很快更新,对定位结果影响不大。
2 定位性能评估
2.1 PPP-B2b改正信息精度分析
在评估BDS-3 PPP-B2b服务实时PPP性能之前,首先分析PPP-B2b改正信息精度。本文以GFZ发布的BDS-3精密产品作为PPP-B2b信息精度评估参考基准[11]。选取2020-10-04~06的数据,分析比较BDS-3卫星PPP-B2b精密轨道和钟差改正精度,表2给出了PPP-B2b改正信息精度统计。
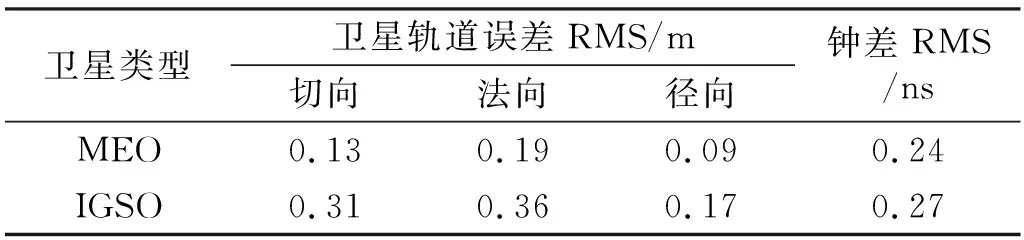
表2 PPP-B2b改正信息精度
由表2可知,BDS-3 MEO卫星经PPP-B2b改正后轨道均方根误差统计在径向、切向和法向方向均优于0.2 m,而IGSO卫星径向、切向和法向方向均优于0.4 m;所有BDS-3卫星经PPP-B2b改正后的钟差均方根误差均低于0.3 ns。MEO卫星轨道精度略优于IGSO卫星,其差异原因与卫星轨道类型有关[12]。
2.2 实验数据与处理策略
采集北京、成都、拉萨、乌鲁木齐4个测站2020-10-04~10的数据,采样间隔为30 s,基于所采集观测数据以及PPP-B2b改正信息进行静态和仿动态实时PPP,具体处理策略见表3。静态和仿动态PPP主要区别在于坐标参数在滤波中的过程噪声不同。前者认为单点定位结果为常量,以测站给出的坐标真值作为参考值;后者以对应历元的单点定位结果作为先验值,先验方差设置为30 m2。关于双频组合选择,考虑到B1C与B2a信号为BDS-3新体制信号、B1I和B3I为BDS-2向BDS-3平稳过渡信号,本文以B1C+B2a和B1I+B3I两种双频组合为例进行分析。

表3 基于PPP-B2b改正参数的实时PPP数据处理策略
2.3 定位精度
图2与图3分别给出北京站和成都站静态和仿动态条件下2020-10-04(doy278)B1C+B2a、B1I+B3I双频实时PPP误差序列。由图可知,在静态条件下,B1C+B2a和B1I+B3I定位模式均能很快收敛至cm级;在仿动态条件下,B1C+B2a和B1I+B3I模式定位结果与参考结果吻合较好,所有定位结果基本一致,均在一定时间内完成收敛,且收敛后定位误差稳定在21 cm以内。

图2 北京站实时精密单点定位误差序列Fig.2 Real-time PPP error sequence at Beijing station

图3 成都站实时精密单点定位误差序列Fig.3 Real-time PPP error sequence at Chengdu station
本文以定位误差序列均方根统计值作为精度统计结果,表4和表5分别给出4个测站静态和仿动态条件下E、N、U三个方向以及水平(H)、三维(3D)定位精度统计。由表4可知,静态条件下,各测站B1C+B2a和 B1I+B3I定位模式在E、N、U三个方向定位精度均优于11 cm,H方向定位精度均优于9 cm,3D方向优于14 cm;由表5可知,仿动态条件下,各测站2种定位模式在E、N、U三个方向定位精度均优于22 cm,H方向定位精度均优于17 cm,3D方向优于27 cm。对比分析B1C+B2a、B1I+B3I模式定位精度可知,无论是静态还是仿动态条件下,B1C+B2a组合定位精度均值均小于B1I+B3I组合定位精度均值,说明B1C+B2a组合定位精度略优于B1I+B3I组合,其原因与双频消电离层组合噪声放大情况有关:B1C+B2a组合噪声放大系数略低于B1I+B3I组合噪声放大系数。

表4 基于PPP-B2b改正信息的BDS-3静态PPP 定位精度统计

表5 基于PPP-B2b改正信息的北斗三号仿动态PPP 定位精度统计
2.4 收敛时间
收敛时间定义为满足定位精度要求且至少持续5 min。为了测试仿动态处理模式的收敛时间,对所选测站的数据进行处理,处理策略与上文相同,每隔1 h进行一次初始化,以水平方向定位精度不超过0.3 m、高程方向定位精度不超过0.6 m作为收敛精度要求,统计达到指定精度的收敛时间。分别统计4个测站2020-10-04~06每天24组数据的收敛时间,对所有数据的收敛时间取均值得到最终的收敛时间统计结果。图4给出B1C+B2a和B1I+B3I模式达到指定精度的平均收敛时间。由图4可知,4个测站2种模式的收敛时间均不超过15 min;成都站和北京站达到既定精度的收敛时间略低于拉萨站和乌鲁木齐站;除成都站外,B1C+B2a收敛时间均少于B1I+B3I。

图4 仿动态条件下2种模式的定位收敛时间Fig.4 Positioning convergence time of two modes underimitation dynamic simulation conditions
为进一步分析基于PPP-B2b改正参数的PPP收敛性能,分别统计水平和高程方向收敛到0.1 m、0.2 m、0.3 m和02. m、0.4 m、0.6 m所需要的时间,如表6(单位min)所示。
由表6可见,仿动态条件下,B1C+B2a 和B1I+B3I 定位精度收敛到水平方向、高程方向分别不超过0.2 m、0.4 m所需时间为19.6 min、20.4 min;收敛到水平、高程方向分别不超过0.1 m、0.2 m所需时间为44.1 min、42.3 min。B1C+B2a的收敛时间总体上略少于B1I+B3I。
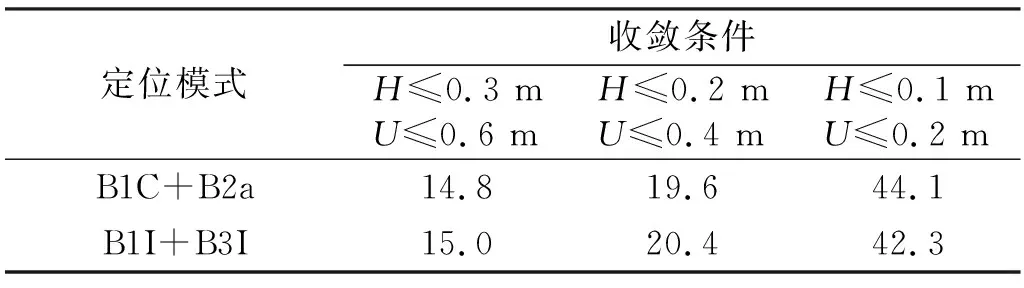
表6 仿动态条件下收敛时间
3 结 语
本文以4个测站双频观测数据、B1C信号广播星历和PPP-B2b信号播发的改正信息为输入,分析在使用PPP-B2b电文信息进行PPP过程中需要注意的改正参数之间2个匹配性问题以及基于PPP-B2b改正参数的实时PPP性能。得出如下结论:
1)改正参数匹配性方面。BDS-3广播星历中的IODC参数与PPP-B2b信号中的IODN参数相对应,在广播星历更新的初始几个历元往往与PPP-B2b改正数历元无法匹配,此时应注意仍采用旧的广播星历IODC参数标识与改正数参数进行匹配,直至PPP-B2b改正参数IODN标识更新完毕。PPP-B2b改正电文通过IOD Corr参数标识轨道改正数和钟差改正数的版本号,钟差改正数比轨道改正数更新频率高,2种改正数大部分时间都是匹配的,当钟差改正数进行更新且其IOD Corr发生变化时,两者无法匹配,此时应采用前面与轨道相匹配的钟差改正数进行改正,直至轨道改正参数标识IOD Corr更新完毕。
2)定位精度方面。在静态条件下,B1C+B2a和 B1I+B3I定位模式水平方向定位精度优于9 cm,高程方向优于11 cm。在仿动态条件下,水平方向定位精度优于17 cm,高程方向定位精度优于22 cm。无论是在静态还是仿动态条件下,B1C+B2a定位精度略优于B1I+B3I,这与双频消电离层组合噪声放大情况有关:B1C+B2a组合噪声放大系数低于B1I+B3I组合噪声放大系数。
3)收敛时间方面。2种组合模式在仿动态条件下定位精度收敛到水平、高程方向不超过0.3 m、0.6 m所需时间均低于15 min,B1C+B2a的收敛时间总体上略少于B1I+B3I。
