复杂驾驶任务下基于多资源理论的汽车人机交互设计方法
2022-05-26厉钰琪巩淼森
厉钰琪 巩淼森
关键词:多资源理论 复杂驾驶任务 分层任务分析 时间线分析 汽车人机交互
引言
随着车载功能不断涌入驾驶空间,汽车转变为一个集合通讯、导航、娱乐、社交等多元功能的智能交互式空间,车内交互信息与交互行为的种类也变得愈加繁多。这一转变提高了驾驶员行车的机动性和舒适性,也增加了驾驶者对车辆控制任务执行不良的风险和危险水平[1]。与此同时,依赖着车载技术的发展,人车共驾、车内显示多样化、多通道交互等成为了汽车设计的主流趋势,这为驾驶者更高效自然地执行车内复杂任务创造了可能。在这样的背景下,汽车人机交互设计的核心就是基于车内技术设备,为驾驶者提供良好的交互方式以应对复杂驾驶环境、提升驾驶体验。
当前,面向复杂驾驶任务的汽车人机交互设计研究主要从多通道交互、自然交互、驾驶仿真等领域展开,但未对在特定的任务条件下进行设计应用提供指导。在汽车交互设计过程中,出现了车载交互技术“盲目叠加”“繁复累赘”等问题,驾驶者难以有足够的资源应对车内复杂的交互环境。为了让车内技术设备更好地发挥价值,有必要针对复杂驾驶任务进行交互设计分析,思考各时间段下如何合理调用可用资源来执行任务。因此,本文从多资源理论出发,结合分层任务分析法与时间线分析法,提出了一种针对复杂驾驶任务的汽车交互设计方法,以探析各时间段中出现的人机交互设计问题,并从资源分配的角度思考人机交互优化策略。最后以一复杂驾驶任务为例进行设计应用,验证了本方法的有效性。
一、复杂驾驶任务下的汽车人机交互设计
驾驶任务的复杂性体现在三个方面,一是任务高难度,即任务本身对内认知需求较高,或者任务需求超出一般认知能力;二是任务多样性,即各任务的重要层次不同,所需工作资源不同;三是任务关联性,不同的任务之间存在交叉、并行或重叠的关联。复杂驾驶任务下,随着任务难度的上升、多样性及关联性的变化,驾驶者在处理任务时出现知觉模态冲突、强认知或操作难度上升等现象,影响了主次任务的执行。而这种“失控感”也给驾驶者带来了较大的心理压力,容易产生不良的驾驶体验。据研究,在人机交互过程中,给予操作者一定的灵活性,使其能自我调节到负荷的“最佳水平”,可以使任务完成绩效维持在较优的水平,其心理压力也不会过高[2]。
因此,复杂驾驶任务下的汽车人机交互设计的目标可以被理解为:在信息输入阶段,避免各通道间信息流过载;信息加工过程中,减少认知干扰,维持较优的认知负荷;信息反馈时,避免操作冲突,维持较优的体力工作负荷。围绕该目标,复杂驾驶任务下的汽车人机交互设计路径为:判断当前复杂驾驶任务下驾驶者的知觉模态占用、认知负荷及工作负荷情况,确认是否存在资源占用冲突或超负荷,并分析造成上述现象的原因,以寻求车内人机交互设计问题,针对性进行优化。
二、资源占用维度提取
为分析驾驶者在执行复杂驾驶任务时的资源占用情况,需要对人所拥有的身体资源进行分类。
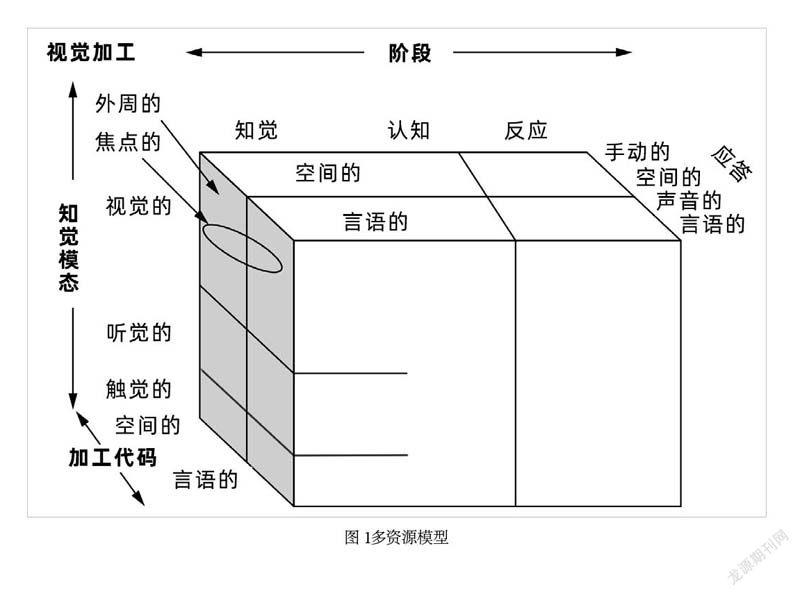
多资源理论(MRT,Multiple Resource Theory)是Wickens等人提出的解释多任务之间资源分配的理论[3]。为描述人的资源多样性,Wickens提出了包含三个维度的多资源模型(图1)的假设,即阶段(stages)、知觉模态(modalities)、加工代码(codes),后来又发展出第四个维度,用来区分视知觉的焦点视觉和外周视觉。“阶段”
维度描述了信息的处理过程,分为知觉、认知、反应三个步骤。“知觉模态”维度涉及到视觉、听觉、触觉三个模态。在视觉模态中延伸出的焦点视觉和外周视觉,前者用于识别精细的细节或物体,后者则用于感知方向和自我运动情况。“加工代码”维度反映了空间的加工和符号的加工之間的区别。
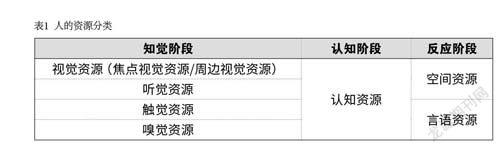
依照多资源模型描述的资源类型,将用户在汽车驾驶过程中涉及到的的人的资源类型以“阶段”划分,可将其整理如(表1)。
三、任务结构化分析
复杂驾驶任务下,驾驶者与车内设备进行交互来完成各项任务目标,为清晰直观呈现任务流程,把握任务细节与要点,需要对任务进行结构化分析。
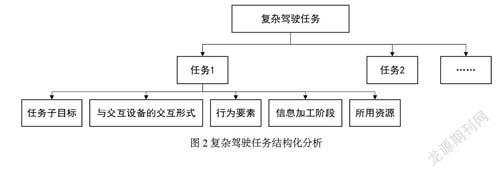
分层任务分析(HTA,Hierarchical Task Analysis)是一种广泛应用的任务分析方法,它将任务执行和任务计划结构化,将其分为任务层、子任务层和操作层,并列出操作人员在系统内执行的各种操作及执行这些操作所需的条件 [4]。为了更清晰地描述用户在任务执行过程中与车载系统的交互情况,本文在HTA的基础上,对各任务下用户与系统的交互形式及行为要素进行描述,并判断所处的信息加工阶段,同时参照上节总结的基于多资源模型的人的资源分类,分析各阶段所占用的资源,如图2。
四、任务占用资源时间线分析
由于复杂驾驶任务下各任务之间存在关联、交叉、并行或重叠的情况,以时间维度对各任务执行时所在时间点、所用时间长度及对应占用的资源进行分析,可以更好地把握任务执行过程中的资源占用及负荷情况。
对于时间信息的记录,非认知任务可通过行为观测直接记录,人的认知活动却很难通过行为观测来计算时间。但可以确定的是,认知负荷伴随着任务而产生。驾驶者在知觉过程中接收任务信息,认知后作出反应,该过程中任务所需的认知负荷程度可以参照Aldrish提出的VACM脑力负荷评级标准进行评定,该评级标准将多资源理论(MRT)融入模型,具有良好的适应性和可信度[5]。其中,认知资源的负荷评分标准如(表2)。
因此,任务执行过程中的非认知资源占用情况可构建“时间-任务-资源需求”关系图(图3)来表现。而认知资源的占用情况,可通过执行任务所需的认知负荷程度来间接表现,即判断任务所对应的认知属性,参照量表进行度量(图4)。
五、资源再分配与交互设计
基于以上分析,可判断驾驶者的资源负荷与冲突情况。为减轻资源负荷或冲突,需要参照多资源理论所述的资源特征及各资源之间的关系,在明确驾驶者的状态和驾驶环境的前提下,进行资源再分配。通过整理Wickens等人的研究成果,可参考的资源分配原则如下:1.跨模态的时间分享比模态内的时间分享表现更好[6],在模态可调用的状态下,若有多个车内任务信息需要传递,应选择多模态进行表征。
2.若车内的多样化信息需通过视觉传递,应避免过长的视觉扫描,并增加信息之间的区分度及凸显度,以提升信息的接收效率并减少混淆。
3.同时性的听觉信息加工十分困难[7],当多个任务占用听觉资源时,需将部分信息转化为其他形式进行表征。
4.触觉模态表征信息与听觉模态有着相似的优势[8],部分结构简单的信息可通过震动拍打等形式进行表征。
5.对重要的车载信息,通过多个模态冗余显示可增加用户信息加工的准确性。
6.在焦点视觉的被占用的情况下,外周视觉可承担部分易识别且结构简单的信息的接收。
7.知觉任务与需要工作记忆来储存或转换信息的认知任务之间存在干扰,在驾驶员知觉任务与认知任务难度及数量过高时,应及时进行调配。
8.在个体认知资源有限的情况下,为减轻认知负荷,可通过设置合理的训练、简化车内任务流程、引导用户主动学习车内设备使用方式等途经来降低任务本身需要的认知资源。同时,在设计车内信息呈现方式时,应设置合理的通道、关注信息之间的时间及空间连续性、突显关键及重要细节、过滤不相关信息,以此来减少外部认知负荷。
在围绕复杂驾驶任务进行资源再分配后,可基于车内技术设备进行交互设计,以充分调动车-人的能动性,使用户在执行过程中能够灵活进行操作,自我调节负荷至“最佳水平”。
六、设计应用
依照复杂驾驶任务下的汽车人机交互设计路径,上文提出的基于多资源理论的汽车人机交互设计方法可分为任务结构化分析、任务占用资源时间线分析、资源再分配与交互设计三个步骤。为验证该方法可有效指导设计,笔者就一驾驶任务情境进行了基于上述方法的设计实践。设计优化对象挑选了吉利博瑞(图5)。
通过对车内硬件设备的调研,了解到车内交互设备除驾驶操作设备,还配备了位于方向盘正前方的仪表屏、位于驾驶位右前方的中控屏,以及分布于驾驶位周边及方向盘内侧的各类实体按键。车内软件系统主要涉及到语音助理、地图、电话及系统设置等。
为提取复杂驾驶任务情境,挑选了10位年龄在25-35岁且有驾驶经验的被试进行了驾驶过程记录与访谈。调研结果发现,用户在执行驾驶导航状态下添加途经点的任务时耗时较长,且对该状态下的任务评价较低。因此,本文选取了该任务场景,对照驾驶者操作任务录像,进行任务结构化分析及资源占用时间线分析,以分析造成任务执行评价较低的原因,并基于资源分配原则寻找汽车人机交互设计优化点。
(一)任务结构化分析该复杂驾驶任务共包括驾驶、导航、添加途经点三部分,表3依照上文提出的任务结构化分析方法对其进行了剖析。
(二)任务占用资源时间线分析结合上一步骤中对各任务所需资源的分析,对照驾驶者操作任务录像,记录各任务执行时间,将所需资源按照时间线排列,得出时间-任务-资源需求关系图(图7)。并分析各时间段下任务所对应的认知类型,参照VACM标准量表进行计算,得出时间-认知负荷评分图(图8),例:0-1秒内,保持驾驶所需的认知负荷评分为1.0,观察道路信息所需的认知负荷评分为0,跟踪路况等提示信息所需的认知负荷评分为3.7,则该时间段下任务认知负荷需求评分为4.7。
依据图7及图8所示,判断资源负荷及情况,并分析原因。
(1)6.0s至7.2s,听觉及视觉资源被多任务占用。分析其原因为:使用语音系统输入途经点时,因导航信息仍通过语音进行播报,造成听觉资源占用冲突,驾驶者需调用视觉资源捕捉仪表屏中的导航信息,使焦点视觉偏离路线。
(2)11.3s至15.0s,在选择途经点、查看途径点位置时,视觉资源被频繁调用,并造成了手部资源的占用。分析其原因为:途径点信息以全文字形式展现,所需阅读时间较长;系统语音识别不准确,驾驶者需点击中控屏选择确认;途径点位置未在选择时在地图中呈现,无法了解其在路线中的位置,在选择后还需触控操作屏幕查看,任务流程复杂。
(3)4.2s至6.0s及12.6s至13.9s,任务所需的认知负荷评分较高。分析其原因为:语音系统同时处理途经点输入任务及播报导航任务,出现多任务并行的情况;对途经点进行选择时,相关信息呈现不直观,用户选择途经点后,还需触控查看途经点在地图中的位置,任务流程复杂。
(三)资源再分配及交互设计示例基于以上资源冲突情况及原因分析,参考资源分配原则,提出汽车人机交互设计策略。
在驾驶者需要同时执行“添加途经点”及“跟踪导航信息”任务时,为保障用户在执行“添加途经点”任务时不错过导航信息,需弱化“跟踪导航信息”任务对听觉、视觉资源的占用,并减少对认知资源的需求。依照上文总结的资源分配原则:(1)在模态可调用的状态下,若有多个车内任务信息需要传递,应选择多模态进行表征;(2)多个视觉信息可通过避免过长的视觉扫描或凸显信息及区分度,来优化用户对信息的接收效率。基于此,可考虑调整知觉模态资源或通过界面设计凸显关键信息以强化表征来进行设计优化。
例如,在该情境下,导航信息为:即将右转,进入××路。在听觉资源被“添加途经点”任务所占用的情况下,可考虑调用驾驶员的触觉资源,通过震动提示来传达转向信息,同时优化转向及车道信息在仪表屏中的显示以更好被识别(图9)。该方案与当前状态相比,将语音传达的导航信息转化为用触觉及视觉进行表征,避免了同时的听觉信息对驾驶者产生干扰。
在驾驶者需要查看途经点信息并进行选择时,需减少该任务对视觉、空间及认知资源的占用,以避免对驾驶任务产生干扰。依照上文所述的资源分配原则,利用听觉及言语资源与系统进行交互可被沿用,系统需要提高语音识别效率,以降低用户通过視觉从中控屏中捕捉信息及触控操作的可能。除此之外,对必要的需通过视觉传递的信息,应考虑优化信息显示、简化任务流程,来提升信息识别效率。
在该情境下,当系统给出途经点推荐时,可考虑将搜索结果与地图界面相结合,在结果所在位置给出“最近”“最顺路”等标记,帮助用户轻松捕捉到途经点,以更快作出选择(图10)。该方式与当前状态相比,更直观地将途经点相关信息在推荐阶段呈现,缩短了用户的阅读时间,避免了驾驶者在选择途经点后还需确认其所在位置,简化了任务流程,较大程度上减少了该任务对视觉、空间及认知资源的需求。
(四)小结从上述过程中可以看出,基于多资源理论的复杂驾驶任务下的汽车人机交互方法,可以清晰地描述任务执行过程中驾驶者与车载系统的交互情况及资源占用情况,并准确找出资源负荷较高或资源冲突的时间段,探寻任务执行评价较劣的原因,并为交互设计优化提供思路。在依照上述交互方法进行设计后,通过驾驶任务模拟、任务执行评价及再设计的方式,可寻求出最优的人机交互设计方案。
在复杂驾驶任务情境多样的状态下,依照上述流程进行任务分析,得出各类任务情境下汽车人机交互设计方案,从而形成系统集的交互设计手册,对提供符合认知规律和操作习惯的驾驶交互系统、保障驾驶安全、提升驾驶体验有着重要意义。
结论
在智能技术迅速发展的当下,车载功能的涌入使得车内驾驶任务情境愈加复杂,人们需要更具包容性的交互方式来进行任务管理,以保障驾驶安全、优化驾驶体验。本文通过对多资源理论的研究,结合分层任务分析法及时间线分析法,提出了适用于该背景的汽车人机交互设计方法。随着多资源理论研究的发展,其构建的多资源模型不断细化,资源间的关系更加清晰,对汽车人机交互设计的指导作用值得继续探寻。
