深海采矿大功率长距离动力输送系统
2022-05-24朱建波何多昌张定华
朱建波,何多昌,张定华
(株洲中车时代电气股份有限公司,湖南 株洲 412001)
0 引言
海洋约占地球表面积的71%,其中蕴藏着丰富的种类繁多的矿产资源,其分布范围广,储量远远超过陆地矿产资源的,如可开采的多金属结核达700亿吨,富钴结壳约210亿吨[1]。随着全球经济的快速发展,对各种资源的需求与日俱增,加速了陆地矿产资源的枯竭。由于矿产资源的不可再生性,世界各国纷纷将目光转向了深海矿产资源的开发。
欧美的发达国家早在20世纪60年代就开始了深海采矿技术的研究[2-3],并在70年代进行了相关设备的研制及海试,但在取得一系列成果之后就停止了进一步的开发。近几年,深海采矿再次成为研究热点,日本、韩国、加拿大等国家和欧盟的科研机构及企业纷纷进行深海采矿的样机研制及海试,各自取得了较大的成果[4]。我国也在20世纪80年代启动了深海采矿技术的研究,先后进行了采矿样机的湖试和单体海试、输送硬管的单体海试及全系统的联动海试,目前正逐步缩小在该领域与国际先进水平的差距。
在深海采矿系统中,动力输送系统不仅承担着将船舶发电机提供的电能安全可靠输送到水下电气设备的重任,同时还要对水下电机进行精准启动及控制。此外,系统需具备完善的自保护功能,使水下供电线路能在复杂海流下可靠工作,电气系统的完好性可被实时监控。在深海采矿试验项目中,有超过2 000 m的供电脐带缆处于水下,深海环境复杂,脐带缆会受到海水的化学腐蚀、洋流运动、难以预测的内波以及车子的运动拖曳等因素影响,对电能输配及光纤通信的可靠性和稳定性来说非常具有挑战性。动力输送系统一旦出现故障,将导致整个项目的失败,因此,对该系统的要求非常高。
本文对我国某深海采矿试验系统的大功率远距离水下供电系统进行研究,根据水下电机的启动特性和定子及转子的参数,对变压器及供电脐带缆的参数进行匹配计算,提出一种大功率、长距离深海动力输送系统。通过建立包含输入电抗器、变频器、正弦波滤波器、升压变压器和脐带缆的仿真模型进行不同参数下的系统仿真,模拟电机在不同参数下启动及运行的电压和电流波形,实现水下大功率电机的平滑启动及实时调控,并解决了其他项目中发生的电压谐振问题。
1 深海采矿系统构成
深海采矿系统从20世纪60年代开始被研究,拖斗式采矿系统[5]、连续绳斗法采矿系统[6]、穿梭潜器采矿系统(GLB采矿法)[7]和集矿机与管道提升结合采矿系统[8]被先后研发出。前3种采矿系统由于存在采集效率低、运行成本高、商业开采难等缺点已被淘汰,目前重点研究的是集矿机与管道提升相结合的采矿系统,其主要由水面支持系统、水下输送系统、水下集矿系统和动力输送系统4大部分构成。因采用的提升方式不同,管道提升采矿系统又有水力提升、气力提升和轻介质提升3种,其中轻介质提升系统因成本高且污染环境而较少使用。
本文所研究的我国某深海采矿试验系统采用水力提升方式,其由水面支持系统、海底集矿及导航定位系统、水下输送系统和动力输送及中央控制系统组成,设计工作水深为3 500 m,试验水深不小于1 000 m,系统组成示意如图1所示。水下集矿车将采集的矿物经过破碎后通过输送软管进入到水下中继站中,再通过输送硬管到达水下提升泵,然后提升到船舶甲板的脱水系统,最后进入储料仓。
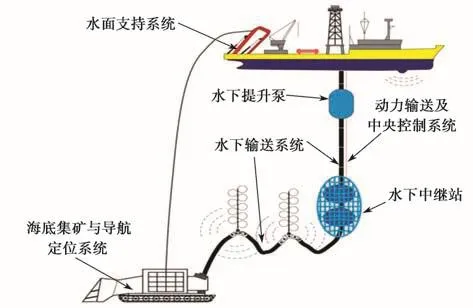
图1 某深海采矿试验系统组成示意图Fig.1 Schematic composition of a deep-sea mining test system
深海采矿系统供电分为甲板和水下两部分。甲板部分除了船舶自身用电外,主要是给水面支持系统的管道提升系统、脐带缆布放回收系统、软管部分回收系统和集矿车布放回收系统等设备供电,由船舶配电板直接提供。水下部分主要是给水下提升泵、中继站和集矿车供电,通过动力输送系统进行控制和保护。
2 动力输送系统概述
动力输送系统主要由甲板和水下两部分组成。甲板部分供电设备被集中安装在3台海工特种集装箱中,低压进线来自船舶配电板,经过变压器升压后出线与脐带缆绞车连接,最后通过唯一通道——复合铠装脐带缆与水下负载相连。水下负载主要为电机及水下相机、水下照明灯、声呐、惯导等仪器设备,分布在水下500~1 800 m位置。从集装箱到水下负载的供电示意如图2所示,水下负载典型参数如表1所示。

图2 水下供电示意图Fig.2 Schematic diagram of underwater power supply

表1 深海采矿系统典型水下负载参数表Tab.1 Typical underwater load parameters of deep sea mining system
3 动力输送系统方案介绍
目前世界各大型海工企业都在大力研究深海采矿系统,各自均开展了相应的样机研制和海试[5]。由于技术的敏感性,国外深海采矿方面的技术细节几乎没有公开资料,只能依靠自主研发。在国内的深海采矿试验系统中,我们通过对系统的研究、参数计算和模拟仿真,攻克了深海大容量长距离动力传输与控制、深海远距离大功率电机启动及控制、深海电路绝缘及接地回路完好性在线监测及诊断、深海光电复合脐带缆开发等关键技术,成功研制了一套动力输送系统样机并通过了海试考核验证。
3.1 配电方案
船舶电网提供3种电压制式,即三相AC 690 V、三相AC 380 V及单相AC 220 V。水下电机最大功率高达720 kW,供电脐带缆最长达2 600 m。如果采用船舶提供的AC 690 V制式直接输送,则电流近1 000 A,会导致线路压降非常大,且脐带缆发热情况严重,极易导致脐带缆烧毁,因此必须采用高压输电方式。但输电电压过高,又会增大脐带缆和电机的制作难度,且对系统绝缘要求高。下面对美国4 000 m MBARI电驱水下机器人(remote operated vehicle,ROV)、中国4 000 m“海狮号”ROV[9]及瑞典SABB 4 000 m ROV的水下供电方案进行对比分析,如表2所示。

表2 典型水下机器人供电方案Tab.2 Typical ROV power supply schemes
经过比较,综合考虑项目实际情况,最终输送电压采用AC3300V制式,水下电机采用额定电压为AC3000V的电机。船舶提供的三相AC 690V电源进入动力输送系统配电集装箱后,经过升压变压器升为AC 3 300V,通过铠装复合脐带缆输送到水下电机。考虑电压波动,变压器一次侧和二次侧配有多个不同电压的抽头。
720 kW大功率电机供电变压器的低压侧额定电流将近1 000A,如直接启动时,启动电流约为额定电流的6~8倍,将近8 000A,会对船舶供电网造成严重冲击,甚至导致其崩溃,因此电机不能采用直接启动方式。电机软启动通常采用晶闸管软启动器,这种软启动器在线路长度较短时可正常工作,在我国以前开展的其他类似深海试验中也有过尝试,但由于供电脐带缆长达数千米,中间还经过升压变压器,软启动器无法正常启动电机;另外,在实际工作中,矿浆输送浓度是变化的,电机转速需要进行实时无级调节以匹配矿浆输送功能,因此电机须采用低压水冷变频器进行启动及转速控制。图3为动力输送系统单线图。从图中可以看出,动力输送系统共分为提升泵、中继站和集矿车3个供电支路,船舶发电机组提供三相AC 690 V电压,3个支路分别成套安装在3台独立的海工特种集装箱内,以便于安装拆运。

图3 动力输送系统单线图Fig.3 Single line drawing of power transmission system
提升泵供电支路用于给水下电机及仪器设备供电,并对电机进行变频启动和调速控制。水下电机数量为1台,其额定功率为720 kW,额定电压为AC 3 000 V。在运行过程中,采用变频器进行启动和调速控制。变频器采用12脉波整流方式,额定功率为1.2 MW,输入为两路三相AC 720 V电压,采用水冷方式散热。船舶提供的三相AC 690 V电压接入集装箱内配电柜后,经过变压器转变为两路AC 720 V输出到变频器;变频器输出通过正弦波滤波器后传输到升压变压器,将低压电转换为高压电后再输送到水下电机。
中继站供电支路为水下软管泵、液压站电机及仪器设备供电,并对软管泵电机进行变频启动和调速控制。软管泵和液压站电机额定功率分别为220 kW和25 kW,额定电压均为AC 3 000 V。25 kW电机功率小,船舶三相AC 690 V电压接入配电柜后直接输送到升压变压器,转变为高压电再输送到水下电机,采用直接启动方式。为避免启动时对船舶电网冲击,220 kW电机采用了变频启动方式,变频器前后两端配置隔离开关,与旁路接触器并联。旁路接触器与变频器不同时工作,两者之间有电气和机械联锁。正常工作情况下,旁路接触器断开,通过变频器启动水下电机;在变频器损坏无法工作的情况下,则采用旁路接触器直接启动水下电机。
集矿车供电支路分别为2台水下电机和仪器设备供电并对2台电机进行变频启动与调速控制。单台电机额定功率为175 kW,额定电压为AC 3 000 V。两台电机采用两台独立的变频器进行启动控制,两个供电支路的结构和工作原理与中继站220 kW电机供电支路相同。
3.2 中央控制系统
为确保整个采矿系统的安全、可靠运行,在试验过程中需要实时掌握动力输送系统的运行参数及设备运行状态,对水下设备进行实时控制。因此,高效可靠的中央控制系统是非常重要的。典型的中央控制系统组成如图4所示。从图中可以看出,中央控制系统由水下和水面两部分组成,其核心是水下和水面信号处理中心,二者之间通过光纤连接,分别实现不同的功能,水面部分被安装在专业的控制舱内。

图4 典型的中央控制系统组成Fig.4 Composition of a typical central control system
3.2.1 水下部分
(1)摄像机将水下实时视频信号传输到水下信号处理中心,视频信号经过处理后通过光纤传输到水面信号处理中心,水面信号处理中心接收、处理视频信号后输入中央显示大屏进行显示。在水面操作台触摸屏,可对水下摄像机进行角度、转向及变焦控制;水面信号处理中心接收到控制指令后,将指令传输到水下信号处理中心,由该中心处理并实现控制功能。
(2)根据水下环境光线的强弱,操作人员可在操作台触摸屏对水下照明灯的强弱进行调节。
(3)液压阀箱用于控制水下各液压阀,从而实现不同的功能。其运行参数可在水面操作台触摸屏上实时查看,也可通过触摸屏对液压阀箱发出各种控制指令、调节运行参数。
(4)推进器控制阀箱用于控制水下推进器,在水下对采矿车进行姿态调整。其运行参数可在水面操作台触摸屏上实时查看,也可通过触摸屏对推进器控制阀箱发出控制指令、调节运行参数。
(5)电机与水下信号处理中心进行双向信息交互:一方面将实时运行参数反馈给水下信号处理中心,传输到水面操作台触摸屏;另一方面根据需要,通过触摸屏可以实时调整变频器参数,实现对水下电机的转速控制。
(6)深度计实时测量采矿车的入水深度,在中央显示大屏显示。
(7)声呐用于实时探测采矿车前后左右的地形环境,将探测画面在中央显示大屏显示。
(8)惯导用于实时计算采矿车的速度和位置,通过与北斗定位信号进行比对来确定其经纬度。
3.2.2 水面部分
(1)水面信号处理中心除了与水下信号处理中心进行信息交互外,还具备其他功能。
(2)船舶甲板摄像头采集实时视频信号传输到水面信号处理中心,在中央显示大屏显示(可在大屏上分割显示,也可将某一画面全屏显示);在操作台触摸屏可对船舶甲板摄像头进行角度、转向及变焦控制。
(3)采矿项目一般都会配有辅助ROV,其实时视频信号被接入中央控制系统并在大屏进行显示。
(4)船舶动态定位(DP)信号接入中央控制系统,在大屏进行显示,可实时了解船舶DP系统工作状态。
(5)船舶接收到的北斗卫星定位信号经过终端处理后传输到中央控制系统,用于确定水下采矿车的绝对位置。
(6)中央显示大屏显示设备运行参数和实时视频画面。
(7)操作台触摸屏显示水下各设备实时参数,也可进行参数设置和设备控制。
中央控制系统的主要监控内容包括电机电压、电机电流、电机温度、液压阀箱压力、集矿车入水深度、集矿车离底高度、集矿车倾角、集矿车方位角、集矿车履带转速、集矿车经纬度、输送压力、输送流量、系统绝缘值、变压器温度、变频器输出频率、变频器输出电压、变频器输出电流、断路器状态、接触器状态、变频器状态、液压阀箱状态、进线电源状态、系统绝缘状态及补偿器状态。
3.3 安全措施
海上工作环境恶劣,不仅有强烈的阳光,还有雨水、潮气及盐雾,因此动力输送系统所有电气设备均被密封在无人值守的海工特种集装箱内,防护等级为IP56,防火等级为A60。为防止集装箱外壳因太阳暴晒产生的热量进入内部,外壳与内壁之间安装有隔热层;对于发热严重的变压器和变频器,在变压器底部和变频柜上安装有散热风机。每台集装箱内均安装了3台大功率制冷空调,设计上采用冗余设计,可确保集装箱内温度保持在合理范围。另外,集装箱内安装有多个高灵敏度的烟雾探测器并与集装箱外部的报警器相连,内部如发生电气事故,可及时发出警报;同时,集装箱内部配置有2瓶二氧化碳灭火器,用于扑灭电气火灾。顶部不同位置设置有多盏应急灯,在突发停电情况下,可维持一段时间的照明,便于维护检修人员安全撤离。
由于深海的特殊应用环境,动力输送系统在水下有长达2 000多米的供电脐带缆,脐带缆能否正常工作将直接影响动力输送系统和控制系统的安全、可靠运行。脐带缆在运行中受到电压波动、不同海层温度和压力、复杂海流、海底生物等因素的作用,容易造成损坏。由于脐带缆在水下,其损坏无法通过人工巡查发现,因此动力输送系统须具备系统绝缘智能监测系统,实时在线监测从甲板到水下电机配电系统的绝缘情况,以确保整个系统的安全可靠运行。
陆地上电气设备接地是通过将外露导电部分的导体与大地相连而实现的,其接地回路的完好性可以很方便地被检查。但深海中,电气设备接地回路的完好性无法像在陆地上一样可以进行人工检查,因此本系统采用了深海电气设备接地回路监测技术,一旦接地回路断开,控制系统能立即检测到并采取相应的保护措施,以避免伤害人员及对设备造成损伤。
4 海试验证
为验证本文所研究的深海采矿动力输送系统的整体性能,项目组按照试验方案开展了100 m级、300 m级和1 000 m级3个阶段的海试。在整个海试过程中,动力输送系统未出现任何设备、技术和操作问题,有效支撑了整个采矿试验顺利进行,取得了以下成果:
(1)实现了高精度电机变频驱动。通过电机和脐带缆参数在线识别,有效控制集矿车、提升泵及中继站上多电机的低频(5~50 Hz)连续的低电流启动和电机转矩的精准控制,并获得一次性成功。采用多重化错相和LC滤波相结合方式,实现低频无谐波的高质量供电,没有出现电磁干扰的现象。图5为试验过程中测得的变频器输出波形图。

图5 变频器输出波形图Fig.5 Waveform of frequency converter output
(2)自诊断和保护系统运行可靠,反应灵敏。在系统布放过程中,水下接线箱脐带缆入口处密封出现问题,内部预先充满的绝缘油全部溢出,箱体内部灌满了海水,导致3相导体短路,绝缘在线监测装置及时发出报警及跳闸信号,避免了电气故障的蔓延,使故障得到快速的处理。
(3)系统高可靠性运行。按照工程化设计思路,严格遵守海工标准对电气、散热和防护系统进行设计和出厂考核,所提供的变频器、配电系统、脐带缆在海试过程中均未出现因技术故障导致的供电中断现象,整个流程为零故障运行。
(4)完成了深海光电复合脐带缆的开发应用。深海光电复合海缆用于连接船舶甲板配电系统与水下电气设备,是船舶甲板与水下设备连接的唯一通道,被誉为水下设备的“神经和生命线”。在深海中,脐带缆受到海水的化学腐蚀、洋流运动、海底生物撞击及撕咬等因素影响,极易造成功能单元失效以及自重引起脐带缆的拉伸失效、顶部及底部弯曲失效等。从机械性能上来说,希望脐带缆的钢丝铠装能尽量厚,这样可以增大机械强度,但钢丝铠装越厚,缆的外径越大,不利于缆内部热量的散发。因此,选择合适的脐带缆参数非常重要,需要同时兼顾其机械和电气性能。本文通过对脐带缆进行不同参数下的力学和发热仿真研究,最终确定了合适的参数,并通过海试现场的工程应用验证了脐带缆参数选择的正确性。表3为脐带缆发热模拟仿真结果。

表3 脐带缆发热模拟仿真数据Tab.3 Thermal simulation data of umbilical cable
5 结语
基于电机启动无冲击和实时可控的项目需求,本文提出了一种适用于深海的大功率长距离动力输送系统。通过海试现场考核,有效验证了该动力输送系统方案设计的合理性和设备的可靠性,并获得了大量第一手的现场试验数据,积累了宝贵的现场经验。随着技术的发展,未来深海采矿研究将进入更深的海域,3 000~6 000 m的采矿海试也会逐步开展。为支撑更大深度的海试开展,水下电机功率必然大大增加,动力输送系统更为复杂,技术难度更大,要求更高,则其电机变频控制、特种脐带缆方案、水下电路的实时保护等须进一步优化,这是后续研究工作方向。
