参数化驱动的接触网腕臂装配BIM建模方法
2022-05-21耿肖石瑞霞赵传
耿肖,石瑞霞,赵传
(中铁第四勘察设计院集团有限公司电气化设计研究院,湖北 武汉 430063)
0 引言
目前,我国已成为世界上电气化铁路和高速铁路运营里程最长的国家。2021年,中共中央、国务院印发《国家综合立体交通网规划纲要》,规划纲要指出到2035年,铁路规模将达20万km左右,其中高速铁路约6.1万km[1]。越来越多的高速铁路建设及运营,对运输组织效率、企业生产经营效率都提出了更高要求,将先进的云计算、物联网、大数据、人工智能等新技术与铁路业务深度融合,有助于高速铁路的建设与运营向智能化迈进。
在接触网工程领域,部分铁路设计院正在开展BIM工程试点并已在部分项目中取得成果。但从总体看,建设主体多元、信息数据分散,尤其是缺乏数据结构定义、数据关系定义和统一的数据架构分析。设计与施工2阶段各自为政,BIM数据流转率低,不仅使BIM核心信息数据在设计、施工、运营全生命周期流转过程中大打折扣,而且制约了现代工业自动化技术与未来智能化趋势在铁路工程建造领域的应用发展。
在新的发展阶段,采用以BIM+GIS技术为核心,结合物联网、移动互联网、大数据等先进信息技术与工程设计、建造技术相结合的手段[2],通过三维模型与信息数据的有效结合,提高数据流转效率,对促进智能高铁建设具有重要意义。
1 接触网设计现状分析
传统接触网设计主要基于二维CAD,采用平面布置设计图与安装图相结合的方式。在平面布置设计图中注明接触网支柱的里程、限界、基础类型、腕臂装配图号等信息,通过腕臂装配图号索引至对应的腕臂安装图,再结合现场测量数据在工厂进行腕臂预配加工后运送至现场安装。
接触网BIM设计中腕臂装配虽然能反映每一处接触网腕臂安装形式,但存在腕臂类型多样、建模繁杂、不能参数化驱动等问题[3-6]。
1.1 腕臂装配图设计
针对不同速度等级的电气化铁路项目,中国铁路经济规划研究院有限公司、各设计单位发布的接触网腕臂装配通用参考图主要包括:隧道外(隧道内)中间柱、非绝缘关节、绝缘关节、分相关节、道岔等位置的腕臂安装形式。通用腕臂装配图一般采用标准限界和标准设计参数信息,不能反映每个工点的腕臂安装情况。腕臂装配图一般基于TB/T 2075—2020《电气化铁路接触网零部件》,结合轨面坐标系与测量坐标系,通过一定的设计原则和逻辑关系来确定各接触网零件的装配方式。通用腕臂安装图中的信息一般包括腕臂的空间结构关系、零件属性及数量、图纸使用说明等。
1.2 腕臂预配计算
腕臂预配计算一般根据现场测量数据对腕臂安装设计图开展进一步细化,包括现场测量—预配计算—工厂加工—现场安装—验收等环节。其中腕臂预配计算依赖的参数主要有现场参数、设计参数、零件参数3类。不同腕臂计算软件的计算规则不同,其核心思想都是通过零件尺寸、零件几何关系和接触悬挂荷载计算,确定零件加工尺寸,以满足设计要求的导高和拉出值(见图1)。零件参数由零件中标厂家确定,现场参数由施工单位测量确定,设计参数由设计原则确定,三者相互作用,共同决定计算结果。计算结果主要包括各类管件的长度、接触网零件的安装位置、定位器选型等。
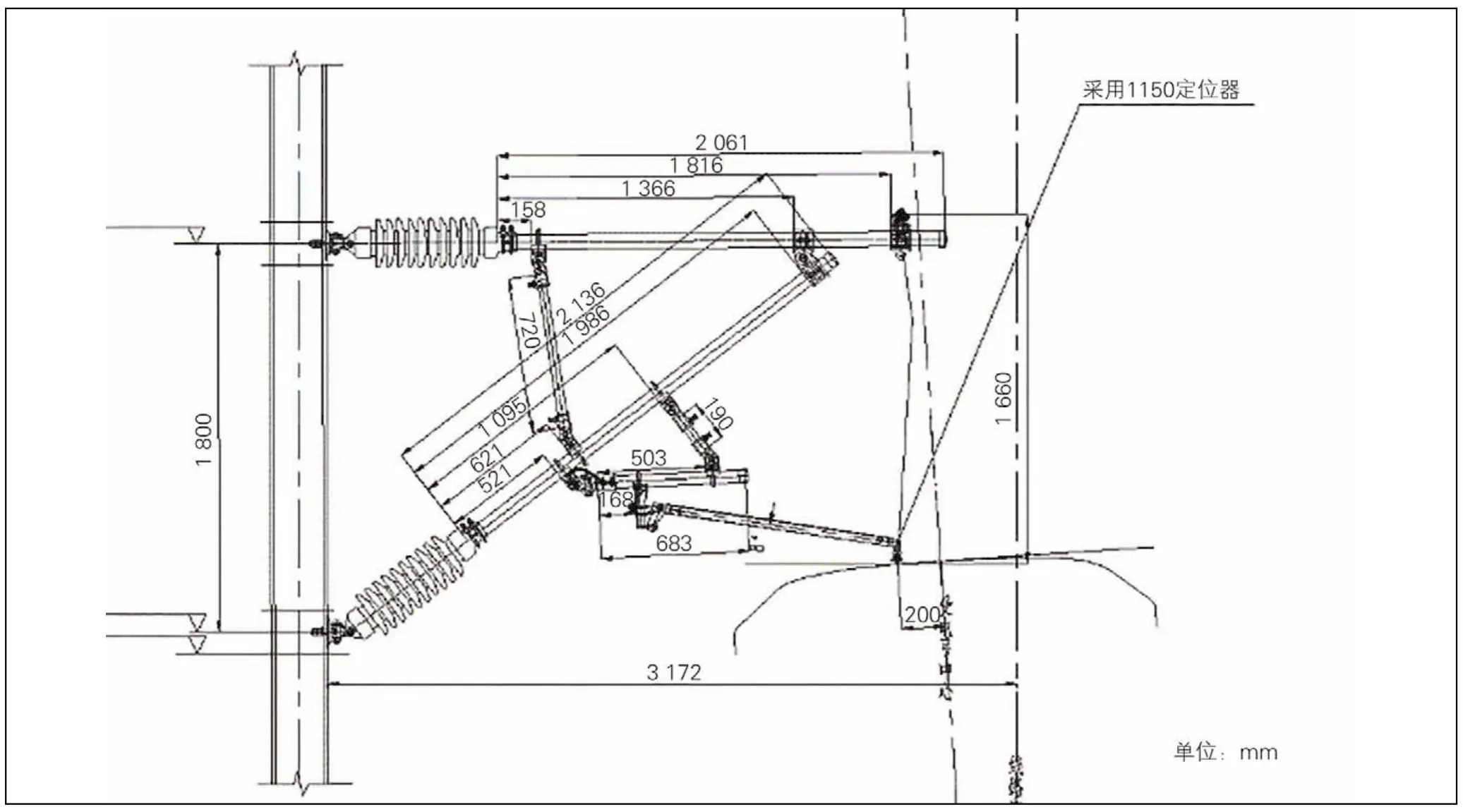
图1 腕臂预配计算成果示意图
1.3 腕臂装配BIM设计
在接触网二维设计中,安装图与平面图是分离的,通过安装图号进行关联,而在三维设计中,腕臂装配是接触网沿线路空间布置的基础,腕臂位置决定了接触悬挂线材的空间位置。腕臂装配BIM设计依赖接触网零件,一般将零散的接触网零件通过点、线、面进行三维空间约束,完成腕臂三维模型组装(见图2)。

图2 通过零件约束的腕臂三维模型
直接采用零件模型约束的建模方式难以满足长大区间BIM设计效率和参数可变性要求,例如,更换零件、修改设计参数及现场参数无法完成对接触网腕臂装配的模型重构,不利于模型的重复利用。
2 基于参数化驱动的腕臂装配BIM建模
2.1 总体目标与技术路线
基于参数化驱动的接触网腕臂装配BIM建模总体目标为:通过数据驱动模型的方式,快速完成接触网腕臂装配的BIM建模,提升建模效率和成果数据的利用率。具体技术路线见图3。

图3 参数化驱动的接触网腕臂BIM建模技术路线
(1)构建接触网腕臂装配母板库。腕臂装配类型归类为正定位、反定位、非工作支3种类型的组合,每种类型再拓展不同子类型,例如,反定位可以拓展为将定位管吊线改为支撑方式、取消防风拉线、取消腕臂支撑等子类型。母板采用二维约束方式进行单独管理,以便进行调用、保存、修改操作。根据零件参数、设计参数和测量参数等外部参数可以驱动母板中的参数计算。
(2)建立接触网零件三维模型库。主要包括腕臂支持装置零件、腕臂底座、定位装置等零件。接触网零件模型应包含完整的属性信息,例如厂家、材质、零件代号、执行标准、计量单位、关键尺寸参数、附注、防腐等级、关键点位置等。
(3)建立参数化驱动逻辑关系。通过简易骨架约束,再通过零件模型绑定骨架的方式,简化约束计算量。以简化的正定位为例,根据现场测量的上、下底座坐标位置,设计的承力索、接触线位置等4处关键点,利用三角函数关系便可计算出腕臂管长度、零件位置关系等预配数据信息。
(4)建立零件与参数的约束关系。在接触网三维零件建模过程中定义零件关键参数,三维零件模型与母板绑定之前进行参数匹配,若模型关键参数与母板参数一致,则进行模型绑定;若不一致则返回修改母板库,以模型参数为输入参数重新计算母板后进行模型绑定。模型绑定主要通过零件关键点确定插入位置,利用约束关系将零件模型与对应骨架线绑定。
(5)成果利用标准化。利用腕臂装配母板库,结合现场数据和设计参数形成腕臂预配工点成果数据库。结构化数据可以向下游生产环节流转腕臂管加工尺寸,以直接用于智能化工厂预配加工,也可通过图纸方式直观显示每处腕臂的外观尺寸,自动建立支柱“一杆一档”数据。此外,通过参数化驱动的腕臂建模形式,可以快速完成特殊工点的腕臂设计,自动生成腕臂装配表,补充图纸说明后形成腕臂安装图设计成果。
2.2 整体架构
基于参数化驱动的接触网腕臂装配BIM快速建模程序整体架构见图4。
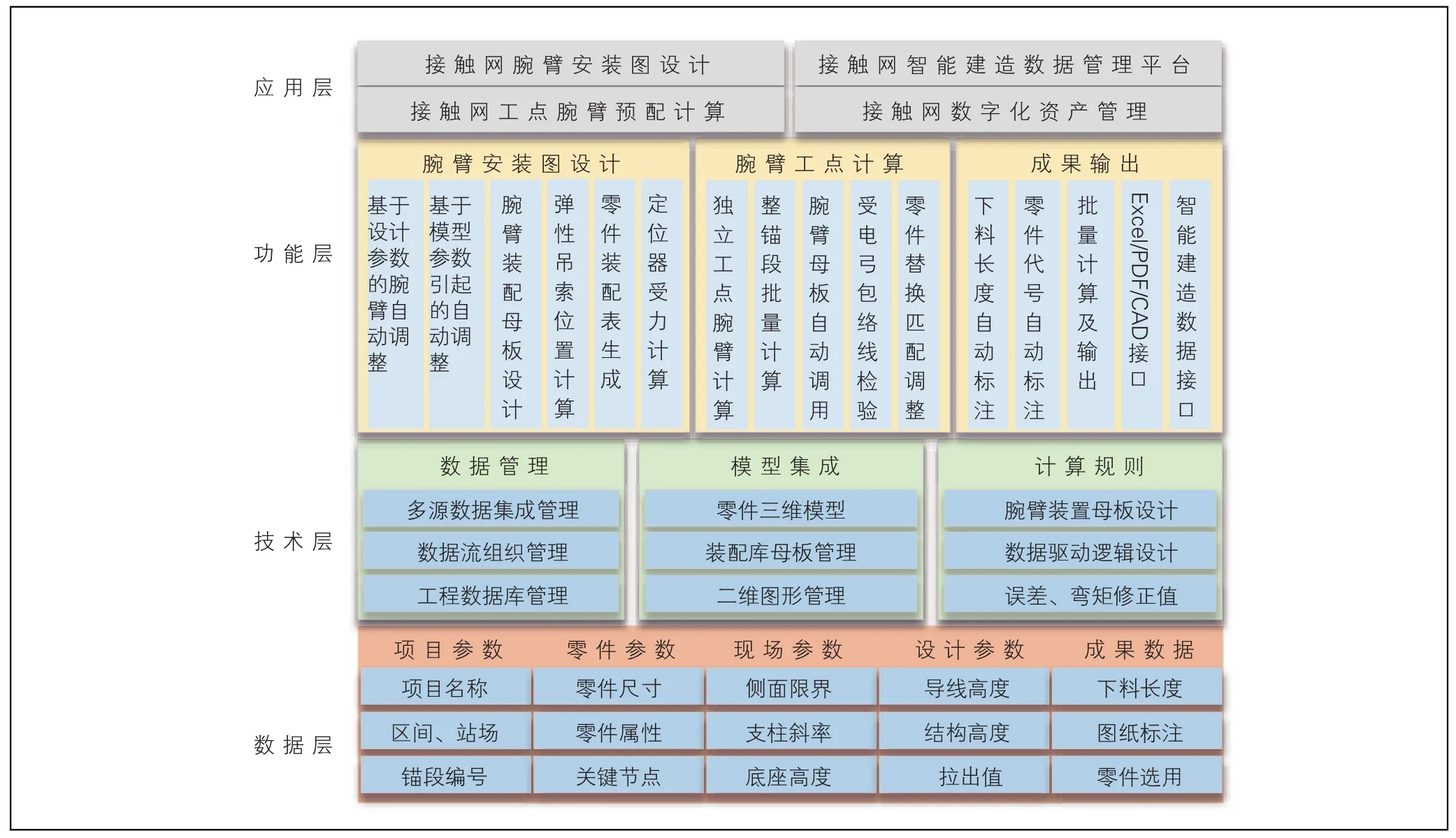
图4 参数化驱动接触网腕臂BIM建模程序整体架构
(1)数据层:主要包括项目数据、零件参数、现场测量参数、设计参数及规范化的成果数据。所有数据均采用规范数据结构,采用数据库或Excel格式进行交互,便于程序识别和机器识别。
(2)技术层:技术层主要实现系统的核心功能,主要包括数据管理、模型集成、腕臂装配计算。其核心为腕臂装配母板设计、母板计算、模型绑定等技术,包含计算结果判断、误差修正等功能。
(3)功能层:实现腕臂装配图设计、腕臂工点预配计算的核心功能。具体包括母板设计、零件与母板的关联、腕臂模型母板的参数化驱动、不同厂家零件的调整替换、成果管理、批量计算及导出等功能。
(4)应用层:实现接触网腕臂安装图设计、现场工点计算,计算成果向施工阶段智能建造流转,以及向运维阶段数字化交付的延伸。
3 关键技术
3.1 零件模型库建设
零件三维模型是接触网腕臂装配BIM设计的基础,利用建模软件建立接触网零件三维模型,定义属性参数及关键点,用于模型参数与母板参数比对、模型与母板绑定。
3.2 腕臂装配母板建设
母板为线型骨架结构,是零件模型的关键参数和约束集合,腕臂装配母板及模型绑定过程见图5。母板中包含初始化的零件参数、设计参数、现场参数,包含参数化驱动的约束计算规则以及成果输出标注模板。直接利用线型母板进行参数化驱动计算,在计算后绑定对应三维零件的方式,可大大简化直接利用零件模型进行三维约束的约束计算量,提升接触网BIM三维空间布置设计效率。
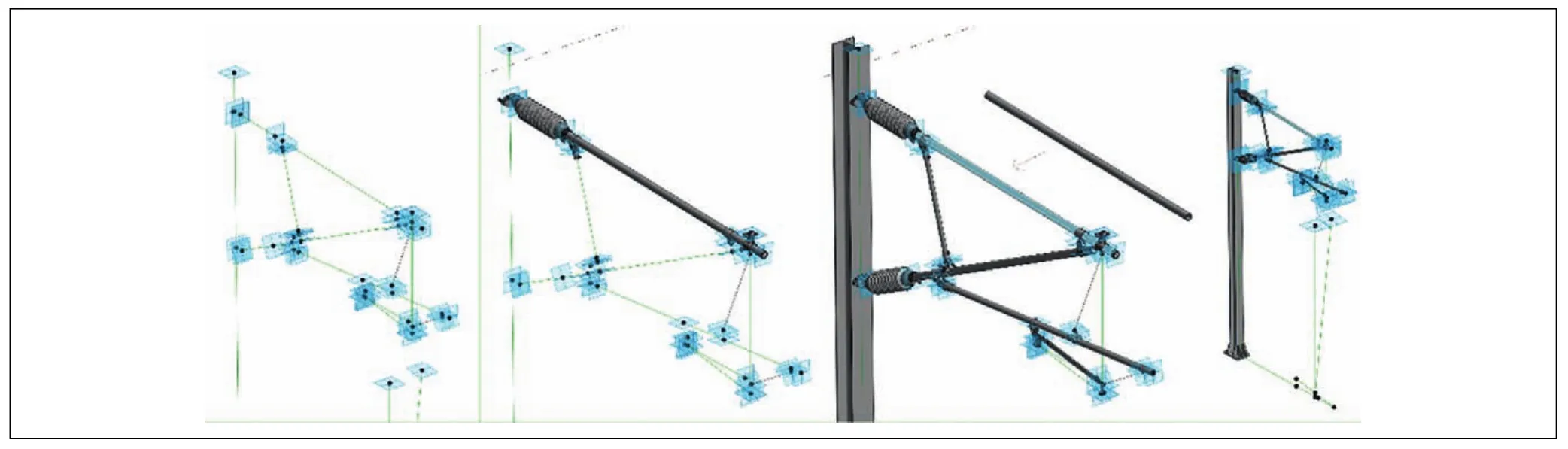
图5 母板建立及模型绑定过程
3.3 母板计算规则
腕臂装配模型根据不同工点的具体参数而变化。以正定位母板骨架计算为例,根据接触网支柱的超高值确定接触网受电弓中心线,通过接触网拉出值、导高确定该处悬挂点的接触线位置,记作点A;根据接触网悬挂设计的结构高度可得到该悬挂点承力索及承力索座的位置,记作点B;根据测量的上、下腕臂底座位置D、E,利用零件参数和三角函数关系,可以计算出C、F、G、H、I、J、K各点的位置(见图6)。
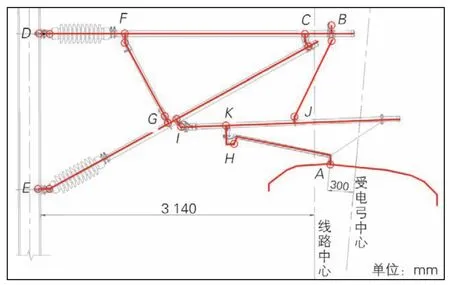
图6 参数化驱动接触网腕臂装配BIM建模计算示例
在BIM建模软件中,利用已建好的零件库,根据二维约束结构上的点一一嵌入,即可构建根据技术参数、零件参数及测量参数驱动的接触网腕臂装配BIM模型。
3.4 腕臂预配计算误差及挠度修正
由于接触网零件之间多为铰接关系,存在一定的螺栓、螺母铰接位移误差。此外,在承力索座位置承受接触悬挂荷载之后,会在腕臂管产生弯矩引起的挠度,腕臂管越长,挠度变化越明显[7]。在预配计算中适当添加裕度,对铰接误差及挠度误差进行修正,更能精准控制现场安装后的接触网结构高度。
4 成果应用
4.1 接触网BIM设计
利用完善的零件库、腕臂装配母板库能够快速进行接触网腕臂三维设计,在接触网BIM设计过程中,仅需考虑接触网的三维空间布置,可以通过关键字或腕臂安装母板编号自动匹配腕臂安装形式。根据结构化数据,批量完成1个锚段甚至整个区间的接触网腕臂设计,为接触网设计自动化、智能化提供有力支撑。
此外,对于咽喉区、关节等复杂接触悬挂区段,能够通过直观效果判断接触网的走向以及腕臂与相邻线路带电体、接地体的安全距离。
4.2 数据流转到智能化预配数据中心
利用腕臂装配数据、结合现场测量数据进行自动计算,流转至腕臂预配工厂,进行腕臂自动下料、切割、组装、转运,可实现真正意义上的BIM信息流转功能,并指导下游施工[8-9]。在京张、京雄、汉十高铁等相关项目中均开展了一定程度的智能腕臂预配装备应用,进一步将智能装备与BIM设计成果结合,通过机械化、信息化方式提升作业效率,减少人员劳动强度。
4.3 提升施工管理信息化水平
研究BIM信息向下游拓展应用的数据接口标准,提供可通过数据驱动的接触网BIM模型,供下游单位提前预览接触网安装形式。建立含设计数据、零件数据、测量数据、施工管理数据等多阶段、多类别的数据管理平台,研究接触网建造过程的大数据挖掘及流转策略,实现接触网设计BIM信息及模型的多重应用,提升接触网建造阶段信息化管理水平。
5 结束语
BIM技术在铁路工程中的应用还存在很大提升空间,上述参数化驱动的接触网腕臂装配BIM建模方法,可快速完成接触网腕臂装配设计,为接触网腕臂装配BIM建模提供了一种新思路。该设计思路采用基于Revit的二次开发实现,其技术路线也适用于CAD或其他三维建模软件。
