基于STM32单片机的双足竞走机器人设计
2022-05-20杨蒙蒙邓三星毕战文杨岚松
杨蒙蒙,邓三星,李 帅,毕战文,杨岚松
(黄河交通学院 河南省智能制造技术与装备工程技术研究中心,河南 焦作 454950)
0 引 言
随着社会和科技的进步,机器人出现在人们的视野,并逐渐代替人们服务于各行各业。日本经济产业省发布的《2012年机器人产业市场趋势》报告显示:2035年,日本机器人市场50%左右的订单来自服务业。意味着机器人产业发展将呈现爆发态势。我国人口红利在逐渐消失,劳动力成本上升,机器人需求增加。众所周知,在没有持续性研发资金供给和市场运作的背景下,国内的产业化机器人的研究还处于相当疲弱的状态,而且前景堪忧。日本、德国、美国甚至韩国在计算机产业化领域正处于高速发展的状态,各国差距越来越大。在当前形势下,我国应加强对机器人领域的了解和研究,为以后的发展奠定基础。
本文利用STM32单片机设计了双足机器人的舵机控制系统,并对机器人的机械结构进行设计和步态规划,提高了机器人步态稳定性。
1 系统整体设计
1.1 设计思路
本文设计的双足机器人系统包含多个部分,主要由机械结构和控制系统组成,包括机械结构、驱动模块、传感模块和控制模块。机械结构类似于人的骨架,它起到一个支撑平台的作用,机器人的其他部分都是在此平台基础上进行安装调试的。控制系统类似于人的大脑,它发出相关指令和信号来控制机器人完成设计的规定动作。双足机器人驱动是通过舵机对其进行控制的,而舵机的基本控制都是通过脉冲宽度调制(PWM)技术进行的。为了得到舵机的精确控制效果,本文设计了一个能够输出多路PWM信号的舵机控制器。
下面介绍双足机器人的步态规划。双足机器人的特点是具有多个关节、多个驱动器、多约束等,因此机器人行走时的步态规划控制难度较大,规划机器人步态使其稳定行走是本文设计的双足机器人的关键。通过大量研究和分析人类行走方式以及翻跟斗的动作,设计出了双足机器人的机械结构并建立了简化运动的模型;在此工作基础上,根据ZMP原理完成机器人的步态设计和规划,通过编程指令控制实现了一系列的动作,如前后移动、左右转动、前后翻滚等动作,最后对步态进行可行性测试。通过多次优化和改进,机器人的步态控制效果较好。在测试环节证明了双足机器人的步行方式是所有步行方式中自动化程度最高的。
1.2 舵机与无线通信控制
舵机控制设计如图1所示,根据PWM模块程序初始化,判断是否有传感器的信息,如果没有,PWM直接输出;如果有,修改PWM占空比,再进行输出。
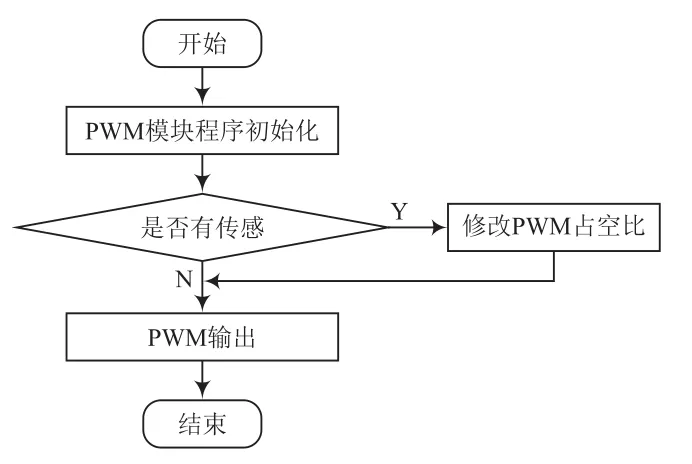
图1 舵机控制设计流程
图2为无线通信模块流程,图中主机的蓝牙与控制器之间的通信是通过指令分组和数据分组完成的。当主机执行完毕1个指令分组时,控制器返回1个事件分组,并向主机发送指令的执行情况以及控制器底层硬件的相关信息。蓝牙模块串口通信的建立过程包含初始化蓝牙芯片、查询周边蓝牙地址、建立连接、数据传输、断开连接等环节。

图2 无线通信模块流程
2 机械结构设计
2.1 设计思路
双足机器人系统中所设计的双足机器人结构尺寸比例是根据人体下半身运动且按照比例缩放得到的,共六个关节。在制作前进行了大量的仿真和实验,参考了大量的数据,最终确定U型机架、脚底板、侧面板、盖板大小以及加工需要的夹件、卡件和连接件。经过精加工,打孔并与螺丝装订,实现整个机器人的机械结构的设计。
串行总线舵机控制板能够控制6个串行总线舵机,因此双足机器人的控制部分选用串行总线舵机控制板,控制舵机作为髋、膝、踝关节驱动,使机器人完成各种动作。完成舵机控制的同时对机器人的机械结构进行优化设计,通过FUSION360建模对机器人的整体结构进行设计。在节约成本的前提下,并没有使用弹性连接件和无线传感器,并且最终实现前后翻和前进等动作。
2.2 部分零件设计
本文设计的机器人机械结构主要包含金属支架、舵机控制板、铜柱、U形连接件、舵机、侧面板和脚底板,如图3所示。其中机器人机械结构中的铜柱包括第一、第二铜柱,U形连接件包括第一、第二、第三、第四、第五U形连接件,舵机包括第一、第二、第三舵机。
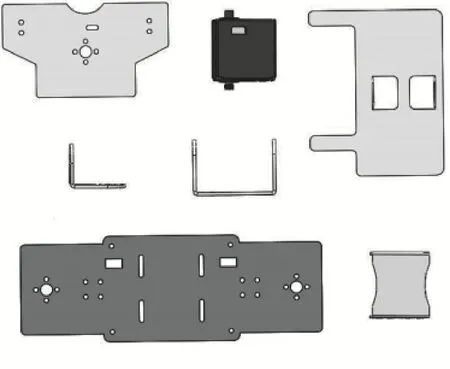
图3 机器人零件
2.3 整体效果设计
如图4所示,机器人主要由金属构成,驱动部分主要分布在机器人机械结构中的顶板、腿部结构、连接结构、脚底板等机械结构处。在双足机器人的设计和制作中,顶板与控制板之间通过多根第一铜柱固定连接,顶板与控制板之间要求相互保持平行;同时控制板下表面通过固定连接件分别与两块第一U形连接件的底座对应连接,目的是为了增加双足机器人的行走稳定性,同时可以增大双足机器人行走时的单步步伐长度,提高机器人的行走效率。如图5所示为机器人的整体结构,其身高约为260 mm。
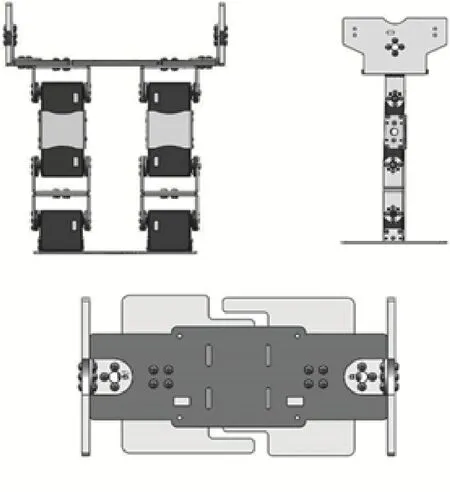
图4 机器人三视图
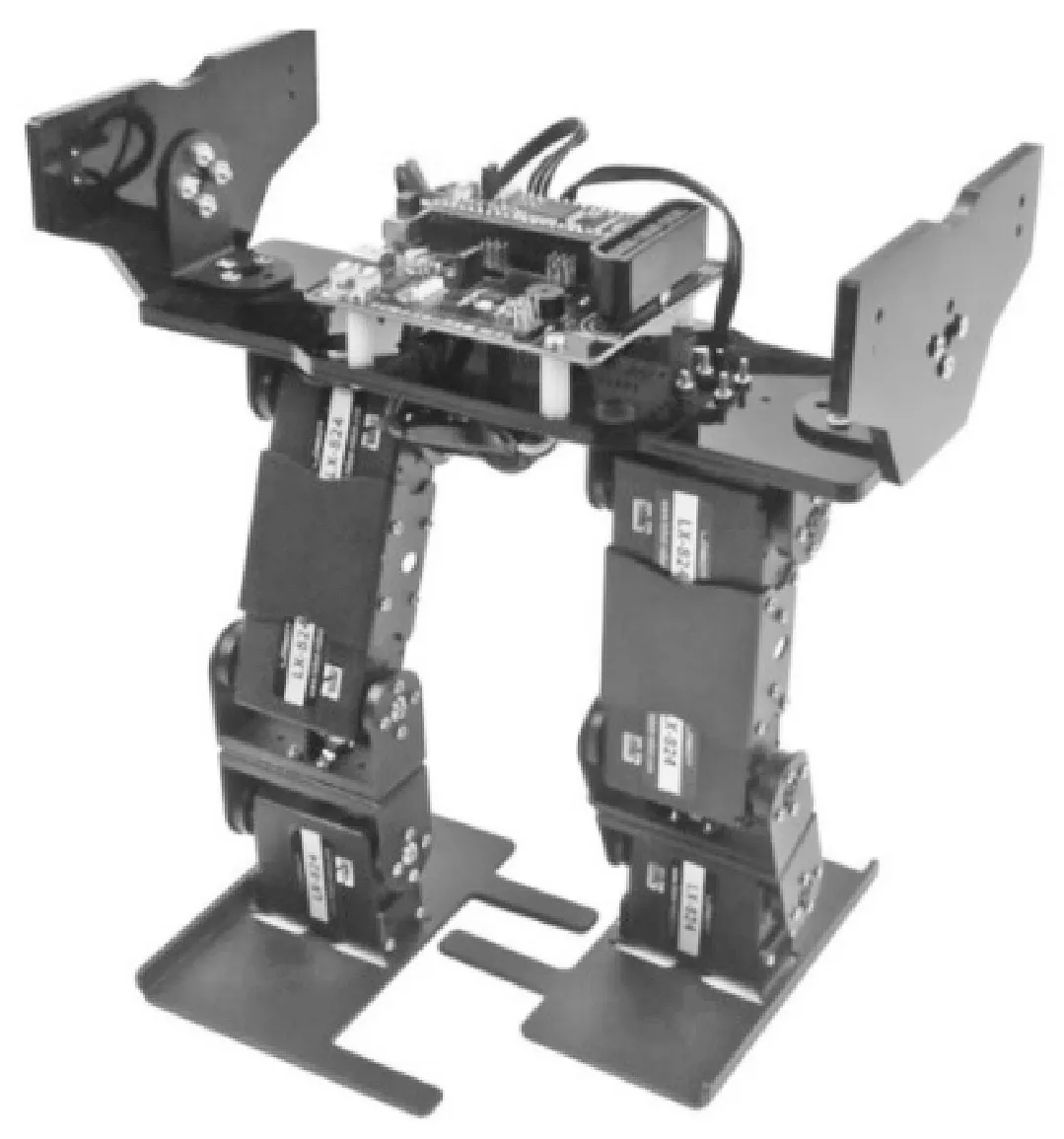
图5 机器人整体结构
3 硬件电路设计
3.1 电源
图6为机器人的整体电源电路。舵机和CPU共用一个电源,供电电压为5~8.4 V,电源功率可根据舵机数量自行搭配,比如使用5~6个舵机时,额定电流要达到3 A以上;使用15~16个舵机时,额定电流要达到8 A以上。由于不是每个舵机都同时工作,所以随着舵机增多,电流增长的速度可以适当减小,比如当使用24个舵机时,电流为10 A左右即可。

图6 电源电路
3.2 控制板
硬件电路的控制板如图7所示,具体模块功能如下:
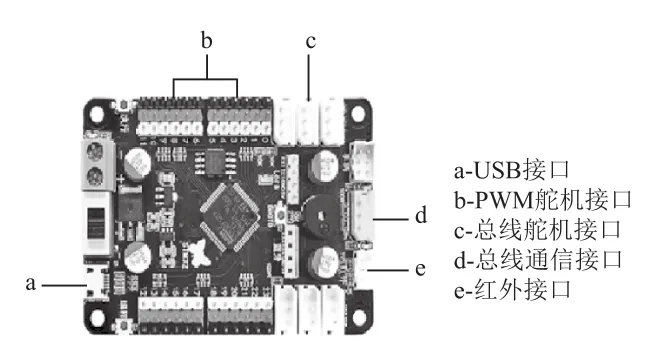
图7 控制板
(1)USB调试口:主要用于与上位机通信,可调试/配置控制器的功能。
(2)红外接口:可接入红外接收头,搭配红外遥控使用,可控制总线执行设备,或者作为其他触发源使用。
(3)总线通信接口:两组黄色端子就是总线通信接口,主要接Arduino拓展板总线接口。
(4)总线舵机接口:6组白色端子就是总线执行接口,主要接执行设备,如总线舵机、总线MP3、总线马达等总线设备。理论上每条线上可串联255个设备,考虑到线的承载能力,建议每条线上串联不超过5个设备为宜。
(5)PWM舵机接口:主要是用于外接PWM舵机,共可接24路PWM舵机,其中白针为信号接口、红针为舵机电源的正极、黑针为舵机电源负极。
3.3 舵机
在本设计中使用的舵机是成本较低且性能良好的伺服电动机。舵机具体的参数见表1所列;舵机尺寸及外观如图8所示。髋、膝、踝关节的驱动是控制机器人完成各种动作的关键。本设计中的机器人采用串行总线舵机控制板,可同时控制6个串行总线舵机,在没有使用弹性连接件和无线传感器的条件下,舵机的控制效果良好。
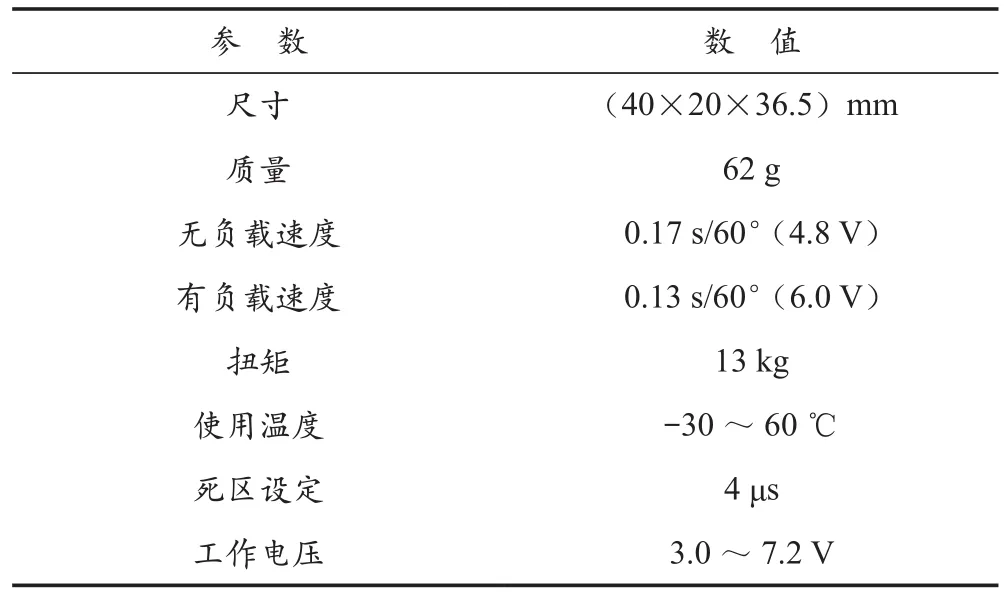
表1 舵机参数

图8 舵机尺寸及外观
4 软件设计
4.1 基本指令


4.2 串行总线舵机通信
本机器人采用单总线通信方式,这种通信方式的最大特点就是不同舵机之间可串联,最多可控制255个舵机。舵机内部设计有主控芯片,能够完成PWM的控制;用户在使用时,通过一条命令即可完成6个舵机的控制,快捷简单。舵机通信流程如图9所示。

图9 舵机通信流程
5 系统开发与调试
对机器人进行调试的方法有两种:一种是有线调试;另一种是无线调试,无线调试更方便快捷。两种调试都是通过同一个软件实现的,如图10所示是正在进行调试的应用界面,在界面中点击“高级—高级设置”,通过对PWM总控和时间总控的调整,使机器人在前进的过程中充分展现每一个舵机的极限,进而在翻滚等一系列动作中把极限都显示出来。通过不断地对参数进行调整,以达到最好的控制效果。如图11所示是在调试完成后,机器人稳定直行前进的动作,经机体6个舵机的相互配合实现了机器人步态行走的动作。在这款仿人类双足机器人中,采用基于ZMP的步态规划算法对机器人的步行轨迹进行预判,保证了机器人行走的稳定性及外形美观。

图10 调试应用界面

图11 调试行走展示
6 结 语
本文设计的双足机器人,其机械结构美观,前后排布轴对称,膝关节至底板的高度与胯关节至顶面的高度呈轴对称。在STM32单片机的控制下结合多种模块,实现了机器人前后翻滚、左右转动以及模拟步态行走的一系列动作,并且各个动作相对稳定。尽管在行走的过程中,机器人会发生偏移,但是在不断地实验和调试后,最后实现了机器人的正常行走。本款机器人可以外接控制器二次开发,与WiFi摄像头控制模块外接,支持视频传输和串口数据透传;还可以与语音识别模块外接,实现语音识别和控制机器人。这些都可以在后期的发展中逐步实现,为国内相关机器人研究提供一些借鉴。
