温室作业柔性移动底盘的设计与分析
2022-05-18石梓廷
石梓廷,张 华
(安徽科技学院机械工程学院,安徽 凤阳 233100)
随着农用机械的普及和发展,我国农业开始从传统农业向现代农业加速转变,大田自动化智能化作业不断取得新的成果[1-2]。然而,由于温室作业空间狭小、通气性差、环境较为固定等原因导致其作业的机械化水平远落后于大田作业[3-5]。有些研究拟通过改装大田作业机械使其小型化、电动化以适应温室作业,但这种改装并未改变传统作业机械的结构,导致在使用过程中出现转弯半径大、作业效率低等问题,难以满足温室的作业要求[6]。同时,这种简单改装的设备也不具备足够的柔性去适应不同的地理条件、种植模式和生产条件。
近年来,学者们结合其他领域机械研究成果,在农业机械底盘上做出了新的尝试。张华等[7-8]提出了柔性智能化喷雾机底盘概念方案,底盘工作台可旋转,药泵和喷雾系统均有升降功能,轮距和地隙可以进行无级调节,该底盘的智能性和柔性可满足全地形、全方位植保作业需求。胡家培[9]设计了一款农用轮履式全地形车,该车采用浮动轮履结构和自动伸缩的方法使平台具有良好的地形通过性和稳定性;另外,设备借助主动适应性控制策略使平台具有良好的地形适应性和避障功能。李翊宁[10]基于四轮独立驱动与四轮独立转向技术,以轮毂电机、偏置轴旋转结构和电磁锁紧装置相结合的方式,研制出柔性底盘系统及其相关的控制系统;测试结果显示,该设备的底盘可以进行三自由度的运动,并通过PWM 方式控制电磁摩擦锁的锁紧力和平衡位置电机的转动位置,目前已研制出了二代机。
笔者在前人研究的基础上,设计了一种新型环保的小型温室作业柔性底盘,它能够适应不同的地形,在运行中稳定作业及爬坡转向,可以根据作业需求改变底盘的轮距和地隙,搭载多种农机具进行多种生产作业,从而满足温室作业中的柔性要求。
1 温室作业柔性移动底盘的基本结构及工作原理
该文设计的温室作业柔性移动底盘基本结构如图1 所示。履带采取四轮一带的形式,悬挂采取被动式非独立减震系统的设计。地隙轮距调节系统由电动推杆、活塞杆和直线导轨组成。底盘以型材为框架进行搭建,两侧履带与地隙轮距调节系统用型材连接。型材一层安置PLC 控制模块、电机驱动器、电机和减速器。型材二层安置电源和导航雷达。型材间以电动推杆、活塞杆和直线导轨连接。
型材一层的电动推杆组进行同步工作,即可改变底盘的地隙。型材二层的电动推杆组进行同步工作,即可改变底盘的轮距。这样就可以同时改变底盘的地隙和轮距,提高底盘对于不同作物和不同生产阶段的适应性,增加底盘的作业范围。直线导轨保证电动推杆工作方向的一致性,增强了地隙轮距调节系统纵向上的力学性能和底盘整体结构的稳定性。履带在地面行驶的过程中,通过控制电机的转向,使两侧的驱动轮向相反的方向等速转动,实现原地转向,最小转弯半径为0,能效好地适应温室狭小的作业环境[11]。
该文设计的温室作业柔性底盘的结构尺寸可以满足实际温室作业的要求,整机尺寸为979 mm×896 mm×1 060 mm,作业速度为5 km/h,地隙为400~700 mm,轮距为700~960 mm,空载质量100 kg。
2 温室作业柔性移动底盘的基本控制流程
如图2 所示,底盘的控制系统采用模块化的设计,分为两侧履带的驱动系统、地隙和轮距的调节系统以及中央控制器。各子系统间通过CAN 总线连接[12]。该底盘的具体控制方法为:在行驶时,通过中央控制器向电机驱动器发出控制指令,然后电机驱动器对步进电机进行指令,变更两侧电机的转速和驱动力,以达到改变底盘运动状态的目的,各驱动系统的状态参数通过传感器反馈到中央控制器;在改变轮距地隙时,通过中央控制器向正反调节器发出信号,然后正反调节器对电动推杆进行操作,电动推杆到达指定进程时,电动推杆停止工作,完成对地隙和轮距的调节。

图1 温室作业柔性移动底盘结构示意图
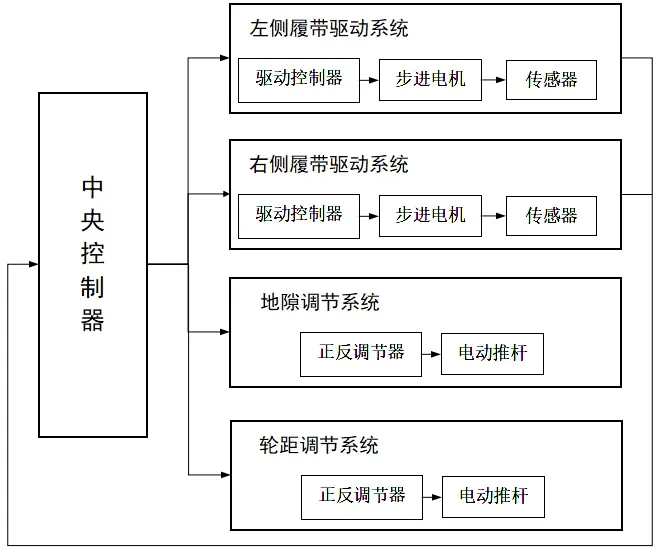
图2 温室作业柔性移动底盘的基本控制流程
3 温室作业柔性移动底盘可挂载的农机具
作为智能农业装备,用于温室作业的柔性移动底盘不能局限于仅有运输的功能,还要有多种温室作业的功能。这需要设计多种配套的农机具,而现今这方面的研究较少。如今的温室作业基本以微耕机和手扶式拖拉机为主,作业能力单一。在性能的限制下,尽量多地设计出配套的农机具,使一台温室作业底盘在作业方面拥有强大的柔性,适应不同的生产阶段和不同的作业对象[13-14]。笔者为底盘设计了3 种作业方式,农机具通过与底盘上的螺孔进行连接即可使用,更换便捷。
3.1 左右侧翻犁
为了完成犁地作业,笔者选取用于微耕机的小型左右侧翻单铧犁。如图3 所示,在底盘型材架的后侧安装连接件,连接件与套杆通过螺栓固定,套杆与侧翻犁也通过螺栓连接。除了连接不同的耕深调节孔,底盘本身具有可以改变地隙的柔性,也能达到改变耕深的效果。
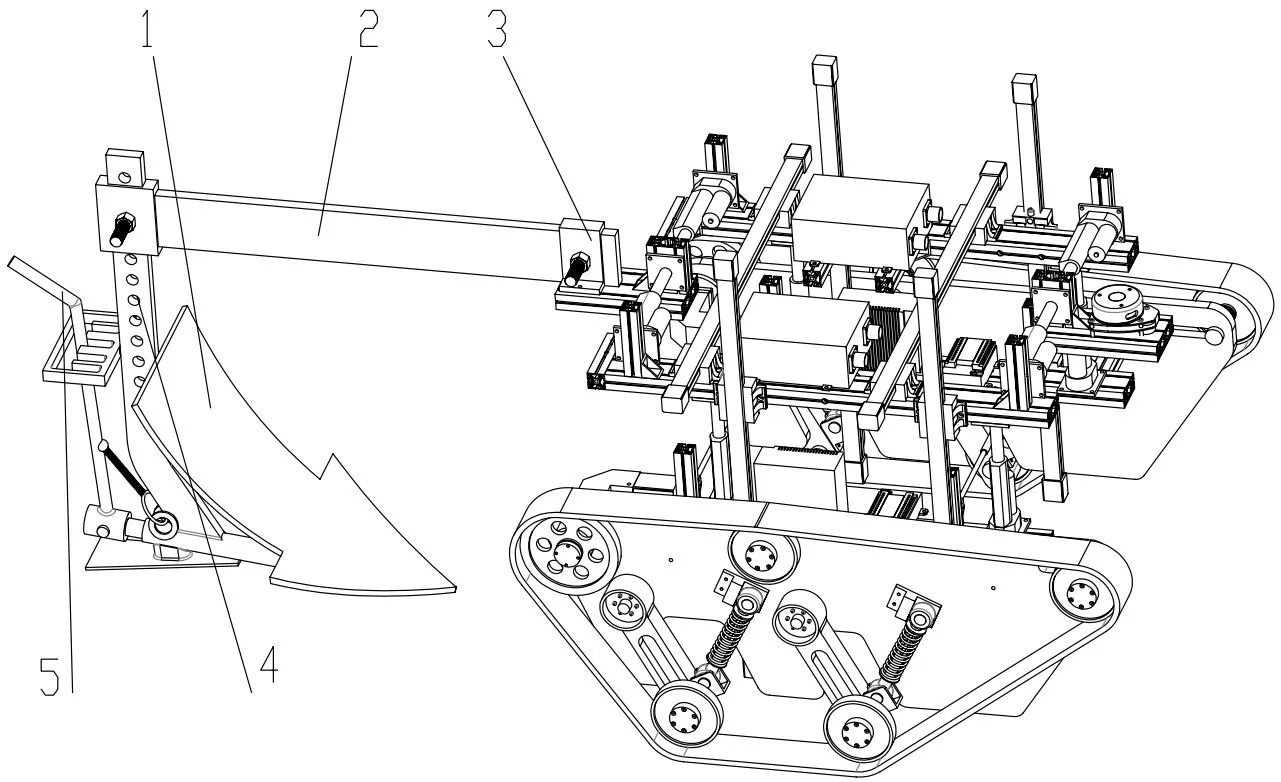
图3 底盘挂载侧翻犁示意图
3.2 喷雾机构
为了完成喷雾作业,笔者设计了一种用于该底盘的喷雾机构。如图4 和图5 所示,该机构由2 个喷雾机、药箱、限流阀、导管及相关连接件构成。喷雾机进出风口均有滤网,其底部焊接在连接件上。底盘本身具有改变地隙的柔性,所以不需要像通常喷雾机构一样额外制作升降机构也能满足喷雾的要求。

图4 底盘装载喷雾机构示意图
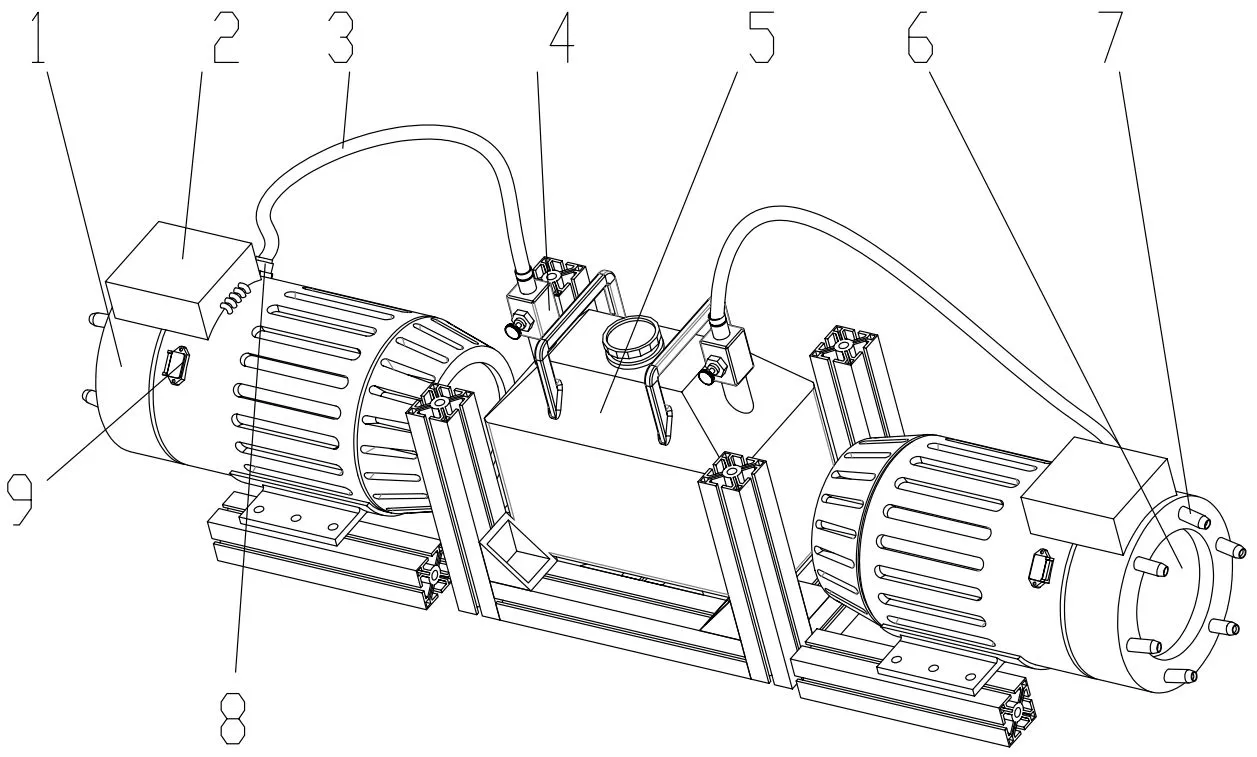
图5 喷雾机构示意图
3.3 覆膜机构
为了完成覆膜作业,笔者设计了一种用于该底盘的覆膜机构。如图6 和图7 所示,该机构由裁剪刀片、连接刀片、马达、地膜卷辊、覆土轮、限位连杆和相关安装座构成。覆膜时,裁剪刀片处于安全刀位,不会触碰地膜,底盘的履带充当传统覆膜机的地膜镇压轮对地膜进行镇压。覆膜完成时,马达带动刀片转动,收紧地膜的同时对地膜进行裁剪,完成覆膜作业。
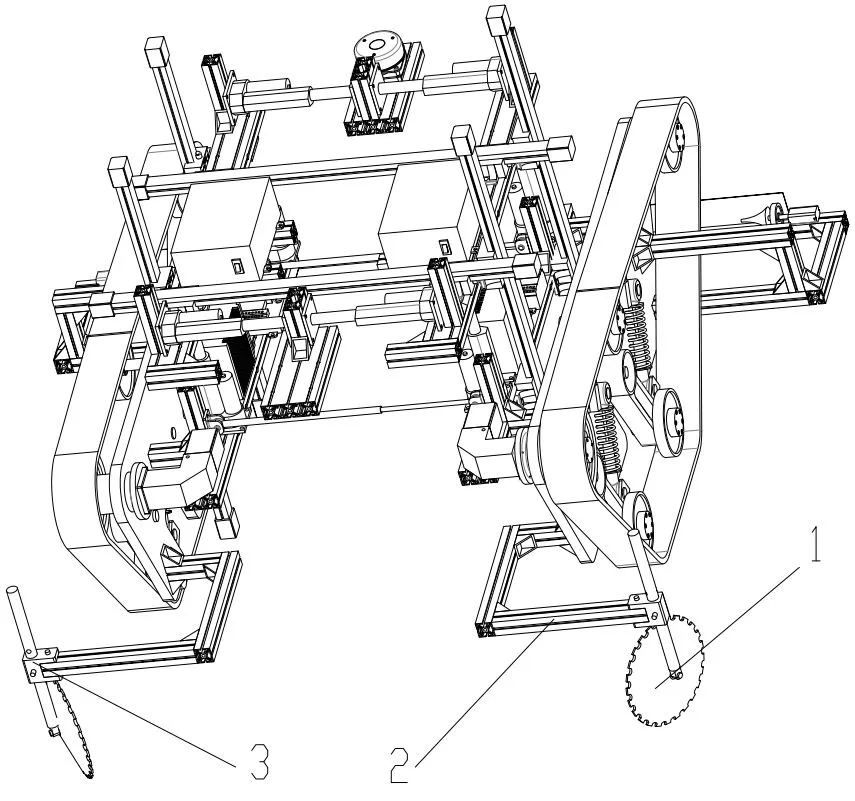
图6 底盘装载覆膜机构示意图一
图7 底盘装载覆膜机构示意图二
4 温室作业柔性移动底盘的有限元分析
温室作业工况较为复杂,因此对底盘结构有较高的要求,需要对底盘的部件进行有限元分析,以保证材料强度上的可靠性[16]。底盘在工作中存在转向、制动、改变地隙轮距以及挂载药箱和其他农机具等情况。经分析,电动推杆、直线导轨和型材架为主要承重部件。此次有限元分析选取这些部件为研究对象,选取部件均以铝合金为构成材料,分析结果如下。
4.1 电动推杆
由图8 可知,电动推杆在螺栓连接处出现最大应力和应变,均处于较小的范围,最大形变为0.001 309 7 mm,低于弹性变形范围。因此,该设备的电动推杆可以满足强度上的要求,能够保证底盘正常工作。
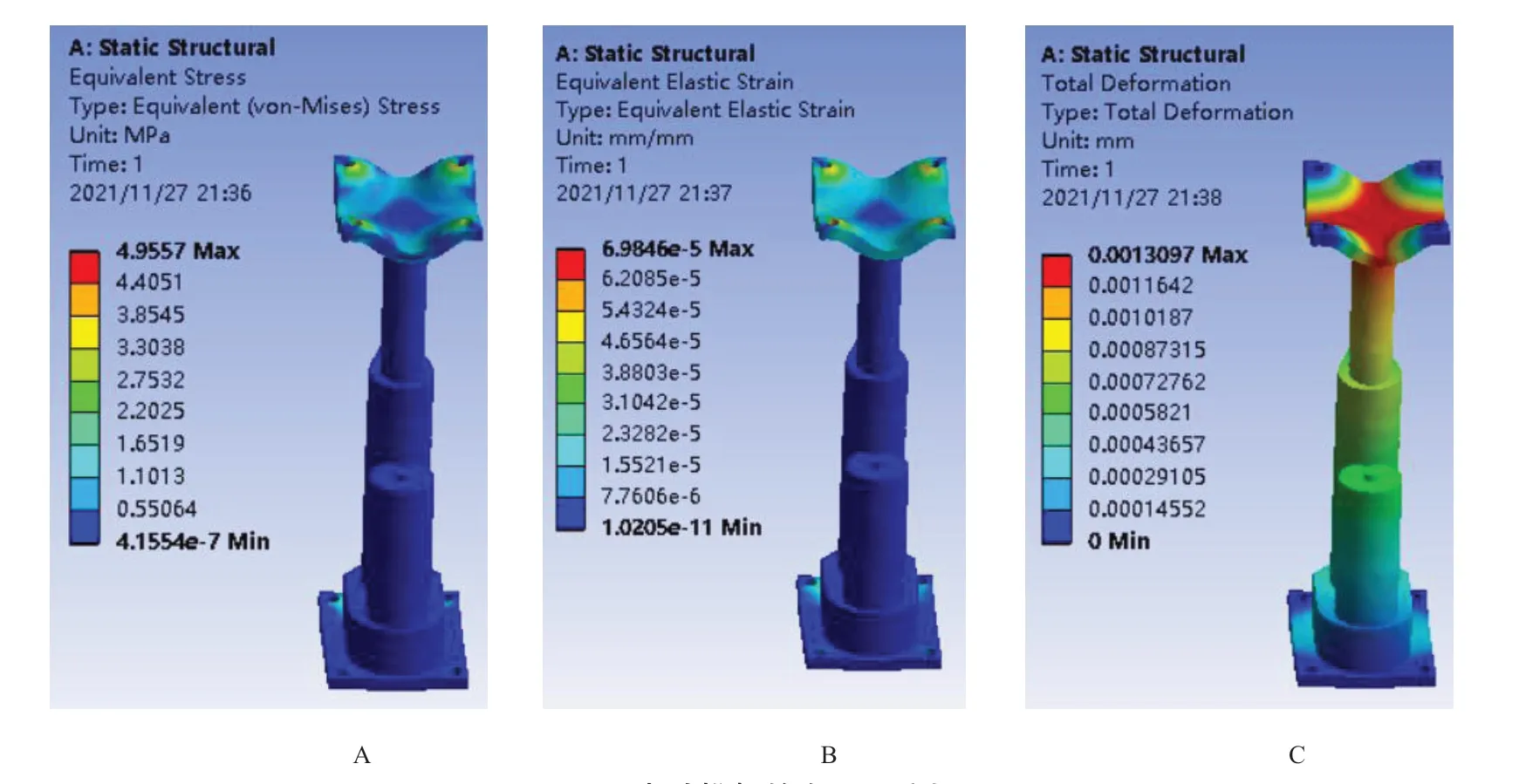
图8 电动推杆的有限元分析
4.2 直线导轨
从图9 可以看出,直线导轨在中间处出现最大应力和应变,均处于较小的范围,最大形变为1.360 7 mm,低于弹性变形范围。因此,该设备的直线导轨可以满足强度上的要求,能够保证底盘正常工作。

图9 直线导轨的有限元分析
4.3 型材架
由图10 可知,型材架在连接座间出现最大应力和应变,均处于较小的范围,最大形变为0.008 153 7 mm,低于弹性变形范围。因此,该设备的型材架可以满足强度上的要求,能够保证底盘正常工作。
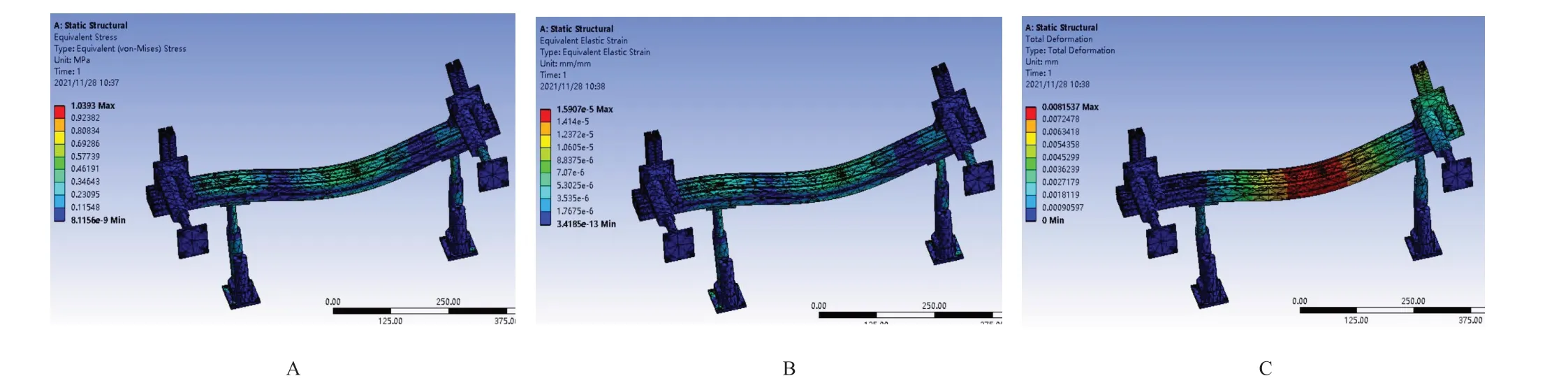
图10 型材架的有限元分析
5 小 结
为了适应狭小空间和多种地形的温室作业,设计了一款可以根据作业要求改变轮距和地隙,可以搭载多种农机具的温室作业柔性移动底盘。对底盘结构、工作原理和部件参数进行了详细设计,对底盘在工作中展现的柔性进行了详细说明。研究配套设计了左右侧翻单铧犁、喷雾机构和覆膜机构3 种农机具,可以实现快速更换,并结合柔性移动底盘完成多种作业。有限元分析结果显示,该设备的电动推杆、直线导轨和型材架均能满足强度上的要求,保证底盘在工作中的稳定性,为下一步开展虚拟机仿真和室内导航研究奠定了基础。
