采煤机机电短程截割传动系统运动参数优化调节方式确定
2022-05-14苗亚雄
苗亚雄
(山西焦煤西山煤电西铭矿信息中心,山西 太原 030052)
引言
采煤机截割部是与煤层直接接触的部件,由于工作面顶板煤层或岩层的不均匀导致其所承受的载荷处于动态变化状态,由于载荷的传递导致摇臂箱体容易变形或者机身振动严重的问题。为了避免由于摇臂箱体变形导致传动系统无法正常工作的问题,将原摇臂中的传统传动系统更换为机电短程截割传动系统,并将其置于滚筒中。相对于传统传动系统而言,机电短程截割传动系统具有传动链短、可靠性高等优势。但是,机电短程截割传动系统由于存在多个并行传动路线,导致各个传动路线出现不均载和不同步的问题[1]。本文将重点开展采煤机机电短程截割传动系统的参数优化调节和综合控制研究。
1 机电短程截割传动系统的设计
1.1 机电短程截割传动系统的总体设计
目前,滚筒采煤机传统传动系统置于摇臂中。当截割部滚筒承受的突变载荷传递至摇臂导致摇臂变形后将影响传动系统发挥其正常传动功能,具体表现为:由于摇臂箱体变形导致其内部传动系统齿轮的受力不均匀,进而导致整个传动系统损坏[2]。针对上述问题,本文拟提出采用三台电机+耦合轮系和行星轮系构建采煤机的机电短程截割传动系统,具体结构如图1 所示。
由图1 可知,截割电机分别对三个主动齿轮进行驱动,三个驱动齿轮对被动齿轮即耦合轮系进行传动;耦合轮系将动力传递至行星轮系,其行星架为输出部件将电机的动力传递至滚筒。所设计的机电短程截割传动系统,有三条传动路线。理论上每个电机的输出扭矩为滚筒所需截割转矩的1/3,而且每个电机的尺寸、容量和转子惯量均较小,具有快速响应的优势;同时,大大减小了传动系统所占据的空间,并具有较高的可靠性[3]。将传动系统由摇臂箱体内部转移至滚筒内,解决了由于摇臂箱体变形导致传统系统损坏的问题。
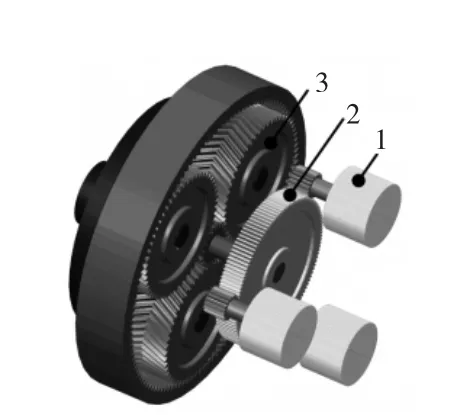
图1 机电短程截割传动系统
1.2 机电短程截割传动分系统的选型设计
1.2.1 电机的选型
结合采煤机的平均截割深度、滚筒半径、平均牵引速度和截割比能耗等参数得出该型采煤机滚筒负载的截割功率为241.9kW;结合截割电机、耦合轮系和行星轮系的传动效率,得出机电短程截割传动系统的整体传动效率为0.92。则由此可以得出,每个截割电机所要求的驱动功率为(241.9kW÷3)÷0.92=87.6kW。
结合当前市面上截割电机的性能和参数,确定截割电机的额定功率为90 kW,其对应的额定转速为1 460 r/min。
1.2.2 耦合轮系和行星轮系齿轮参数的确定
结合MG700/300 原传动系统的传动比为47.5,对应机电短程截割传动系统耦合轮系和行星轮系的各级齿轮的参数见下页表1。

表1 耦合轮系和行星轮系各级齿轮参数
2 采煤机运动参数优化调节与综合控制
根据上述所设计的机电短程截割传动系统分别建立采煤机截割-牵引耦合模型,包括牵引系统模型、采煤机负载模型和最终形成的截割-牵引耦合模型,根据所搭建的模型开展采煤机运动参数的优化调节和综合控制。
2.1 截割-牵引耦合模型的设计
牵引系统模型仍然基于原采煤机的牵引系统建立,结合采煤机的复杂模型,建立如图2 所示的截割-牵引耦合模型。

图2 采煤机截割-牵引耦合模型
2.2 采煤机运动参数对截割载荷和截割性能的影响
本节对不同采煤机运动参数对应截割传动系统所承受载荷的影响和对截割部截割性能的影响进行对比。
2.2.1 对截割载荷的影响
从理论上讲,机电短程截割传动系统中行星轮系和耦合轮系中各级齿轮的啮合力随着滚筒转速的增加而降低;随着采煤牵引速度的增加而增加。因此,为减小机电短程截割传动系统的载荷,应适当增加滚筒转速、减小采煤机牵引速度。
2.2.2 对截割性能的影响
对于截割性能而言,通过块煤率和生产率两项参数反映。其中,当采煤机截割滚筒的转速减小、牵引速度增加时对应所得煤炭的块煤率增加;而生产率与滚筒的旋转速度无关,随着牵引速度的增加对应生产率增加。综上,为保证采煤机的截割性能,可降低滚筒旋转速度、增加采煤机牵引速度。
2.3 采煤机运动参数的优化调节
本节对采煤机截割阻抗从180 kN/m 在某个时刻突然增加为250 kN/m 工况下,采用截割-牵引联合调速和牵引调速对采煤机截割性能和滚筒所承受载荷的影响进行对比。
2.3.1 截割-牵引联合调速调节方式
基于优化算法可知,当截割阻抗为180 kN/m 时对应的最佳滚筒转速为23.69 r/min,牵引速度为5.441 m/min;当截割阻抗为250 kN/m 时对应的最佳滚筒转速为30.15 r/min,牵引速度为4.473 m/min。设定载荷突变的时刻点为仿真时间的3 s,在调速过程中耦合轮系和行星轮系啮合力的变化以及截割性能的变化如图3 所示。
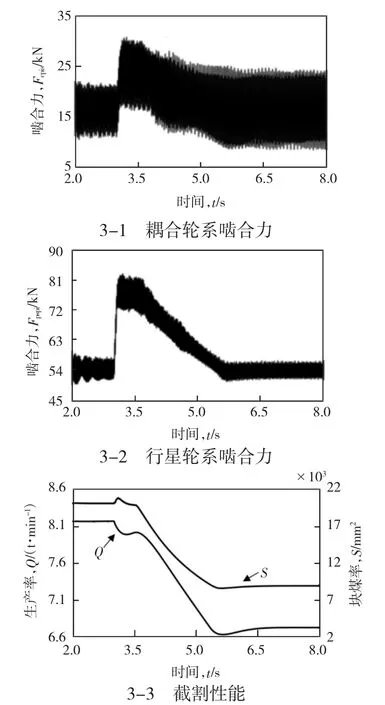
图3 截割-牵引调速方式的仿真结果
由图3 可知,在上述工况下采用截割-牵引调速方式下虽然耦合轮系和行星轮系的啮合在采煤机运动参数调节过程中降低;但是,在调节过程中对应块煤率和生产率也是减低的。
2.3.2 牵引调速方式
基于优化算法可知,当截割阻抗为180 kN/m 时对应的最佳滚筒转速为23.69 r/min,牵引速度为5.441 m/min;采用牵引调速方式,当截割阻抗为250 kN/m时保持滚筒转速为23.69 r/min 不变,将牵引速度减低为4.473 m/min。设定载荷突变的时刻点为仿真时间的3 s,在调速过程中耦合轮系和行星轮系啮合力的变化以及截割性能的变化如图4 所示。
由图4 可知,在上述工况下采用牵引调速方式下虽然耦合轮系和行星轮系的啮合在采煤机运动参数调节过程中降低;但是,在调节过程中对应块煤率和生产率也是减低的。

图4 牵引调速方式的仿真结果
综上,两种调速方式对应耦合轮系、行星轮系及截割性能的变化趋势一致。为最终确定最佳优化调节方式,对上述两种调速方式的控制效果进行对比,结果见表2。

表2 不同调速方式对应控制效果
由表2 可知,截割-牵引联合调速方式比牵引调速方式具有更快的调整速度;而且调整后截割-牵引联合调速方式的块煤率和生产率等指标均优于牵引调速方式。因此,针对机电短程截割传动系统应采用截割-牵引联合调速方式对采煤机参数进行优化调节。
3 结语
综采工作面煤层、岩层的不均性导致截割部滚筒所承受的载荷处于动态变化状态,进而容易导致摇臂变形,从而导致摇臂内部传动系统损坏。为此,本文基于三个截割电机、耦合轮系和行星轮系设计了机电短程截割传动系统。同时,通过仿真对比得知,针对机电短程截割传动系统,应采用截割-牵引联合调速方式对采煤机参数进行优化调节。
