基于克里金法的列车定位方法研究
2022-05-13欧阳籽勃史天运
欧阳籽勃,史天运,王 萌
(1.中国铁道科学研究院,北京 100081; 2.中国铁道科学研究院集团有限公司通信信号研究所,北京 100081; 3.中国铁道科学研究院集团有限公司科技和信息化部,北京 100081)
引言
随着全球导航卫星系统在铁路行业的广泛应用[1],基于北斗导航的列车定位可实现列车准确定位,越来越多的学者关注将GNSS与各类传感器或地面设备的组合定位方式[2-6],寻求在北斗导航失效时的有效替代方法。利用车载通信单元接收到的基站无线场强信号,可进行位置解算,获得列车定位。传统无线场强定位需要准确的无线基站坐标和无线传输模型,或大量采集并持续更新的无线场强数据。目前,国内外针对各种定位方法的研究较多。周亮等[7]针对接收信号强度指纹法定位技术精度较低、单纯的惯性导航累积误差较大等问题,采用基于信赖度的联合定位算法对多种信息进行融合处理,以获得较高的综合定位精度;胡可刚等[8]在论述了移动通信系统中无线定位技术应用、定位系统分类的基础上,讨论目前所采用的各种定位方法及其适用范围和限制,分析影响定位精度的各种环境因素,提出了在实际网络中采用定位技术应考虑的问题和提高定位精度应解决的问题。
但这些方法不能很好地解决在无法正常接收到卫星信号时,列车定位解算失效从而失去定位问题。利用列车沿固定线性轨道不断往返运行的运动特点,提出一种基于克里金法的场强定位方法。通过克里金法对轨道沿线采集的无线场强数据进行插值处理,在降低数据采集工作量的同时实现无线场强数据库快速建立和动态更新。通过Tower Collector软件,同步采集GNSS定位数据和基站场强数据,利用克里金法插值后的无线场强数据库对终端位置进行实时解算,并与北斗定位数据对比。
1 无线定位及测量方式
无线定位是指在无线移动通信网络中,通过对接收到的无线电波特征参数进行测量,利用测得的无线信号数据,对移动终端所处地理位置进行估计,提供已知终端位置信息和服务。
目前,流行的定位技术种类较多, 基于无线定位的特点,主要有时间测量、角度测量和场强测量3种方式。根据定位参数的不同, 可分为到达角测量技术(AOA)、到达时间定位技术(TOA)和到达时间差定位技术(TDOA)等,并由此派生出CHAN、FRIELND,泰勒级数展开以及分类征服(DAC)算法等多种性能不同、复杂度不同的定位算法[9-14]。
其中,时间测量主要有TOA方式与TDOA方式2种。TOA方式通过测量信号的传播到达时间来测量距离[15],已知测量节点位置,通过获取测量节点和目标移动终端的信号发送和接收时间,推测待测节点位置;TDOA方式利用TOA值作差,利用差值求解,通过增加测量节点来提高精度。为提高基于TDOA的无线定位系统的定位性能,史小红[16]建立了使用复数扩频调制信号、考虑频偏和多径因素的TDOA定位系统模型。
角度测量主要基于AOA测量,基本原理是利用测量点具有方向性的天线(Directional Antenna)或天线阵列(Antenna Array),得到移动节点发送信号的方向,从而根据信号的到达方向来进行定位[17]。
然而,传统基于时间测量上的TOA和TDOA均需纳秒级别的硬件时钟同步,而角度测量的AOA需方向性天线,这两种方法对硬件要求较高。
场强测量定位方法可分为信号传播模型法和指纹特征值法2种。信号传播模型法基本原理是利用信道传播模型描述路径损耗,进而基于信号强度来获取收发节点之间的传输距离[18]。主要基于传播模型经验公式,构建联立几何方程,通过求解方程组得到估计位置。指纹特征值法利用场强作为指纹特征值,指纹定位一般分两大步骤,指纹采集离线训练及在线定位指纹匹配。
基于信号传播模型的方法,由于信号强度受到传播环境、天线倾角、无线系统的功率动态调整等因素,传播模型经验公式精准度有限,且需预知精确的基站坐标,该方法通常应用于对定位要求不高的场景。基于无线场强指纹数据库,常规做法是采用地理坐标作为随机场所对应的指数集合,而对应地理坐标的无线场强作为随机场内的测度,需进行大量的指纹采集测量,且对场强测量精度、稳定性有很高要求,同时要求数据库可以快速更新和高效维护管理。另外,建立的数据库是利用一维场强数据检索二维或三维的位置信息,存在多值性。为提高定位精度,往往需反复采集大量无线场强数据、获得基站精确坐标,对前期测量要求较高。
为克服上述问题,提出基于克里金法的场强定位方法,利用列车沿线性轨道固定往复运行且信号交织覆盖的特性,通过克里金法对采集的无线场强进行插值,能够在降低无线数据采集工作量的同时,实现无线场强数据库的快速建立和动态更新。实验表明,所提方法能够在北斗导航定位失效时,成为列车定位方法的有效替代。
2 无线定位及测量方式
2.1 克里金法
克里金(Kriging)法是依据协方差函数对随机过程/随机场进行空间建模和预测(插值)的回归算法[19]。在特定的随机过程,例如,固有平稳过程中,克里金法能够给出最优线性无偏估计(Best Linear Unbiased Prediction,BLUP),因此,在地统计学中也被称为空间最优无偏估计器(spatial BLUP)。对克里金法的研究可追溯至20世纪60年代,其算法原型被称为普通克里金(Ordinary Kriging,OK),常见的改进算法包括泛克里金(Universal Kriging, UK)、协同克里金(Co-Kriging,CK)和析取克里金(Disjunctive Kriging,DK)[19],克里金法能够与其他模型组成混合算法。
若协方差函数的形式等价,且建模对象是平稳高斯过程,普通克里金的输出与高斯过程回归(Gaussian Process Regression,GPR)在正态似然下输出的均值和置信区间相同,有稳定的预测效果[20]。克里金法是典型的地统计学算法,被应用于地理科学、环境科学、大气科学等领域。
2.2 列车无线场强覆盖模型
列车定位区别于其他领域的二维、三维定位,其基础定位是基于里程的一维线性定位。根据列车运行特点和车地无线通信网络覆盖特点,同时为保证列车通信的高可靠性,无线基站的覆盖方式通常采用交织覆盖来提供冗余,列车沿铁路线路前进时,会同时处于2个无线基站的覆盖范围内。如图1所示,在某个特定时刻,列车上可同时获得2个基站的场强数据。
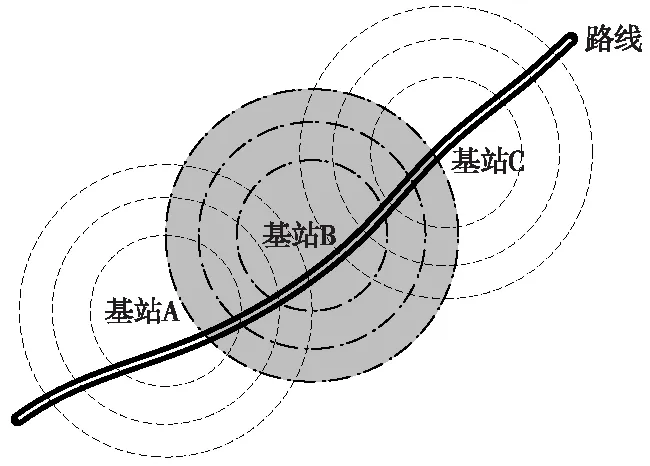
图1 列车无线场强覆盖模型
无线场强覆盖可近似用对数距离路径损耗模型(Logarithmic Distance Path Loss,LDPL)描述,具体公式如下
d=10(|r|-A)/(10×n)
(1)
式中,r为设备所在位置的RSSI值;A为距离设备1 m时的RSSI 绝对值,对于某个具体设备,A值是一定的;n为环境衰减因子,随环境不同而变化,但对于某个区域,n可以近似相同。
根据LDPL模型,对于单个基站,由于列车坡度相对变化较小,沿里程方向的场强变化大体呈驼峰形曲线,随着列车移动,不同基站的场强曲线交织叠加,呈现波峰交替滚动向前的形状,如图2所示。
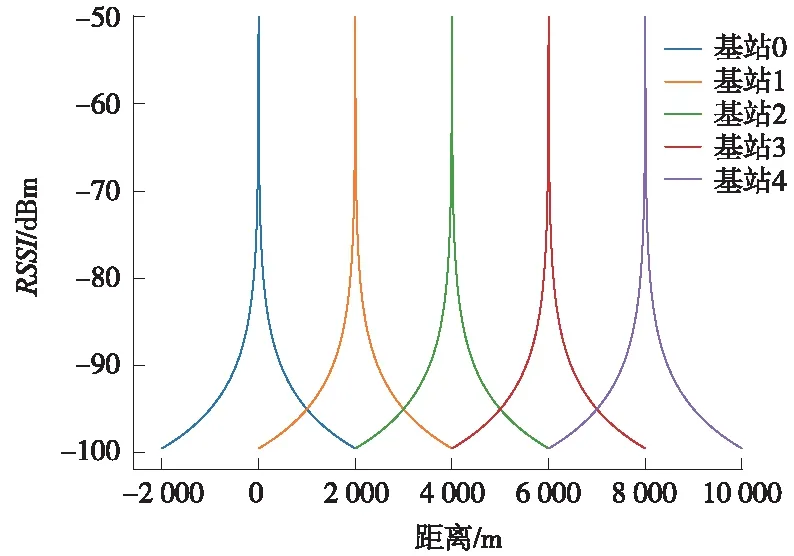
图2 列车无线场强变化示意
2.3 基于克里金法的无线场强随机场
传统无线场强定位应用克里金法时,基于二维平面或三维空间坐标采集无线场强,建立无线场强数据库,随机场所对应的指数集通常为地理坐标,对应每一点的测度为无线场强。会构成较为复杂的三维(经度、纬度、场强)数据或四维(经度、纬度、高程、场强)数据组合,数据处理工作复杂。图3为三维无线场强分布示意。

图3 三维无线场强分布示意
由于列车仅运行在轨道上,因此,列车所处里程与坐标呈一一映射的关系。利用上述特点,结合列车无线场强覆盖模型,确定里程与无线场强值的映射关系。基于列车无线场强覆盖模型,通过在对应里程上同时测量的基站A和基站B的无线场强,可以获得多组离散的无线场强数据。无线场强与里程的理想分布如图4所示。

图4 无线场强与里程的理想分布
由于列车可以同时获得2个基站(A和B)的无线场强数据,根据无线场强数据与里程分布的映射关系,同时将场强值作为空间场、里程作为测度,以1 dB的网格对数据进行克里金法插值,得到基于克里金法的无线场强模型。通过基于克里金法的无线场强模型,能够消除无线场强数据指纹数据库检索时返回多值问题,从而有效提高检索速度和定位精度。具体流程如图5所示。
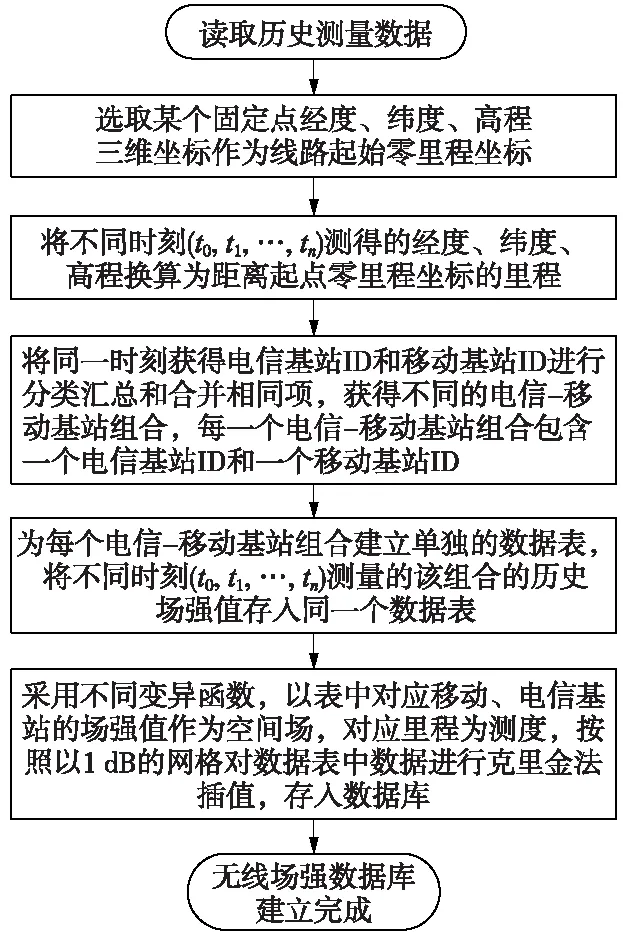
图5 基于克里金法的无线场强定位方法流程
2.4 变异函数
克里金法需预测半方差与距离的变异函数模型,设计了如下线性模型、空穴效应模型、指数模型、高斯模型进行预测,采用Python语言,在QHub中编码实现,具体如下。
线性模型
(2)
指数模型

(3)
高斯模型

(4)
空穴效应模型

(5)
以上4个模型的变异函数中,n为块金值;r为变程;d为分离距离;n+p为基台值;e为幂函数。
2.5 定位解算
列车位于线路的某个里程时,通过双网连接,可同时收到2个不同基站(例如电信基站和移动基站)的信号、基站ID和场强值。利用基站ID组合在数据库中进行检索,可以得到该组合对应不同变异函数的空间场网格分布,再利用场强值在该分布中进行检索,从而获得相应里程,实现定位解算。具体流程如图6所示。
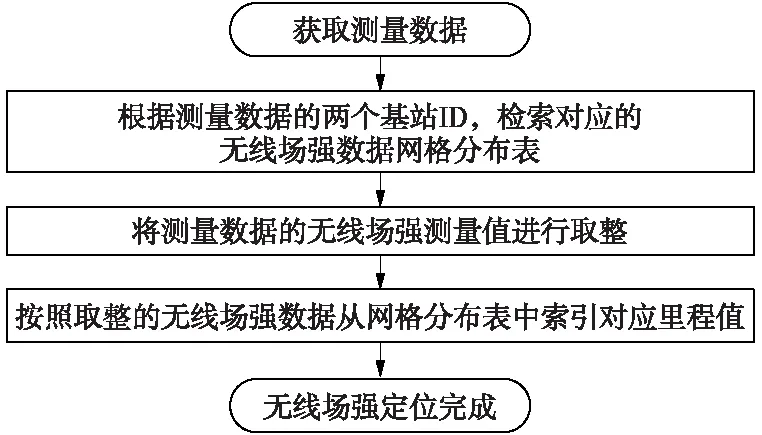
图6 定位解算方法流程
3 测试验证
3.1 试验环境
利用IQOO Z1 双模5G手机,通过Tower Collector软件,记录同时采集的电信和移动的5G基站场强数据和GNSS定位数据,导出为CSV格式文件,并采用自主开发的QHub软件进行处理,共采集了从2020年8月19日至2020年11月4日的49组数据,利用交叉验证,将其中48组数据作为训练集,第49组作为测试集,验证定位情况。
3.2 试验环境
将选定的起点坐标里程设为0,按照列车无线场强模型对测量值进行降维,将每个测量值的GNSS三维定位坐标转换为里程值,从而实现将四维(经度、维度、高程、场强)场强图转为二维(里程、场强)场强图。采用x坐标标注里程,y坐标标注场强,则作为训练集的48组测量数据对应的里程-场强如图7所示,其中,蓝色为电信基站场强,橘色为移动基站场强。

图7 训练集的里程-场强
由图7可知,对应图中的某一固定里程,可以获得多组电信-移动场强对。对于某一个固定组合(电信基站A和移动基站B),可得到其不同场强组合下的不同里程值。从而建立一个空间场,其空间坐标x′为电信基站A的场强,空间坐标y′为移动基站B的场强,对应x′、y′的测度为里程。将图7的不同固定组合写入数据表中,根据列车无线场强模型,将对应电信-移动空间场强对的表中数据,分别采用4种不同变异函数模型,即线性模型、空穴效应模型、指数模型、高斯模型,应用克里金法,以1 dB的网格进行插值,建立每组电信-移动空间场强对映射里程值的空间场。
3.3 数据分析
2020年10月30日7点25分至7点32分在中关村南大街白石桥南至魏公村路段进行实际测试,对无线场强数据中电信-移动基站ID的组合信息数据记录。在无线指纹数据库进行检索,检索得到了相同组合的14组电信-移动空间场强对,对每组空间场强对的场强值进行取整,然后按照电信-移动场强值在插值数据库中进行检索从而获得14个里程坐标。
其中,不同模型得到的插值里程与GNSS测量获得的里程误差如图8所示。

图8 4种变异函数里程与GNSS数据里程误差
对实验数据进行处理后可以发现,采用克里金法的场强数据在不同变异函数情况下均可与GNSS数据保持基本一致。图8反映了线性模型、空穴效应模型、指数模型、高斯模型的里程与GNSS里程对比的误差。由图8可知,整体误差在100 m以内,最大误差243.5 m,最大误差仅出现1次。
GNSS测量数据与基于克里金法的无线场强定位方法在应用线性模型、空穴效应模型、指数模型、高斯模型变异函数的里程绘制如图9所示。

图9 GNSS测量数据与应用4种不同变异函数的克里金法里程比较
如图9所示,选取的4种不同变异函数中,空穴效应作为基于克里金法的列车无线场强定位模型变异函数的定位效果,略优于其他变异函数。虽然选择不同的变异函数会对里程预测值产生不同的结果,但总体差异不大,说明变异函数对克里金法影响较小,普适性较强。其中,最大误差为243.5 m,对比图8、图9测试结果,对最大误差出现位置进行定位分析,发现产生误差的原因为该实验位置缺乏信号基站,为前后场强基站交接处,该时段无法覆盖5G信号基站,设备收到的信号由2G信号基站发出,因此,该路段的实验结果与GNSS差异较大,平均误差为70.5 m。这说明,在卫星失效时,克里金法可有效地代替GNSS,实现列车定位功能。同时,由于克里金法相比传统的四维定位数据(经度、维度、高程、场强),二维定位数据(里程、场强)能够实现更加快速、高效的定位。
4 结语
在北斗导航定位系统信号不良的情况下,根据列车沿固定轨道行进的运动特点,创新性提出基于克里金法的无线场强定位方法。
根据无线场强值随机场模型和克里金法对测量的无线场强数据进行插值,从而修正算法输出结果,实现列车定位。并对4种模型即线性模型、空穴效应模型、指数模型、高斯模型的克里金插值结果与北斗导航定位结果进行了对比。结果表明,使用克里金法无线场强定位方法的平均误差70.5 m,最大误差243.5 m,能够在卫星定位失效时,为列车提供参考定位。相对于传统无线场强定位方法,数据维度较低、计算速度快,证明了该方法的可行性和有效性。
随着5G技术的广泛应用,基站数量和基站密度会进一步提升,无线场强定位环境会进一步改善。这对于城市环境由建筑物遮挡信号应用北斗导航定位受限的区域,是重要的补充定位手段。后续将考虑在此基础上,通过采用定制硬件模块,将双模并发采集增至三模,进一步改善定位精度。