基于多目标三维跟踪雷达的移动式机动车在线测速标准装置
2022-05-12徐天琪何国权
杜 磊, 孙 桥, 白 杰, 徐天琪, 何国权
(1.中国计量科学研究院,北京 100029;2.业纳(上海)精密仪器设备有限公司,上海 201315)
1 引 言
机动车测速仪是用于测定道路上机动车行驶速度的计量器具,是交通管理部门处罚超速违法行为的主要执法计量器具。机动车测速仪被列入到国家市场监管总局于2019年10月发布的实施强制管理的计量器具目录,且监管方式为“型式批准、强制检定”,在使用前应办理型式批准或进口计量器具型式批准,使用中应接受强制检定。
按照工作原理,机动车测速仪可分为3类:机动车雷达测速仪[1,2]、机动车激光测速仪[3]和机动车地感线圈测速系统[4]。
按照检定规程,机动车测速仪的检定项目主要包括2部分:实验室模拟检定和现场实车检定。传统的现场实车检定方法(以下简称传统方法)[1~4]是在封闭道路的前提条件下,装有车载标准测速仪[5~11]的试验车以指定的速度点(限速值的50%和100%左右)匀速通过待检机动车测速仪的测量区域,将待检机动车测速仪的速度测量值与车载标准测速仪的速度参考值进行比对,以对待检机动车测速仪的现场测速误差进行检定。传统方法的优势在于试验车的行驶速度和状态可控,但劣势主要有以下4点:一是需要封闭道路,但近年来随着车流量迅速增大,封路越来越难以实现;二是没有考虑真实交通流量状况中的不同车型、旁车道干扰等多种因素对待检机动车测速仪测量结果的影响;三是现场检定速度点有限;四是检定人员危险程度较高。
为此,2015年实施的机动车雷达测速仪检定规程[1,2]中,提出了在真实交通流量状况下的机动车测速仪在线检定方法(以下简称在线方法)。但因为缺少能够满足在线方法要求且性价比高的在线测速标准装置,在线方法一直没在现场实车检定中得到大范围应用。基于压电传感器的机动车在线测速标准装置[12,13]是固定安装的,不能按照待检机动车测速仪安装位置的不同而置于相应的现场检定位置,因此仅适用于机动车测速仪型式评价现场试验。
本文研制了一套基于多目标三维跟踪雷达的移动式机动车在线测速标准装置,分析了该套移动式在线测速标准装置的设计要求、工作原理、溯源方法和不确定度评定,并通过与基于压电传感器的固定式机动车在线测速标准装置(以下简称固定式在线测速标准装置)[13]在真实交通流量状况下的大样本现场比对试验数据,验证了在线方法的可行性以及该套移动式在线测速标准装置的实际测速性能。
2 设计要求与工作原理
2.1 设计要求
如图1所示,在线方法以真实交通状况下正常行驶的社会车辆为测量目标,在线测速标准装置(图1中A)与待检机动车测速仪(图1中B)在同一时刻对同一测量区域内的同一测量目标车辆(图1中C)的行驶速度进行测量,将在线测速标准装置所测得的标准速度值与待检机动车测速仪的测得的速度测量值进行比对,以对待检机动车测速仪的现场测速误差进行检定。
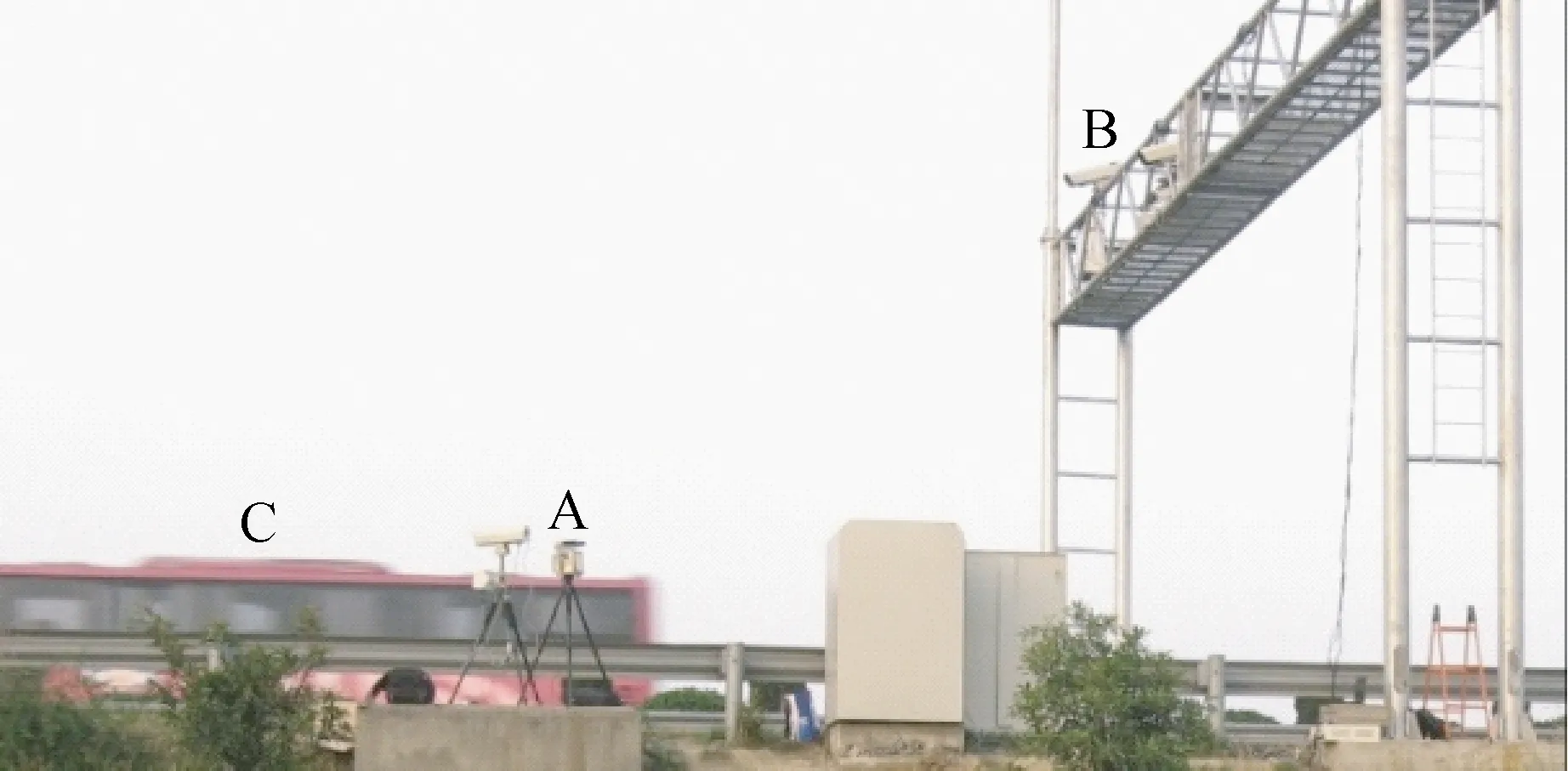
图1 在线方法示意图
与传统方法相比,在线方法的优势主要有:不需要封闭道路,不会影响正常的交通秩序;由于是在复杂真实交通状况下进行在线检定,能够更全面地评价机动车测速仪的实际测速性能;以大量的社会车辆作为测量目标,易于开展各种速度点的大样本现场检定;不需要配备专门的检定试验车,现场检定的工作量和检定人员危险程度均大为降低等等。在线方法的劣势在于测量目标为非合作的社会车辆,在测量区域内的行驶速度值和运动状态均不可控,并且在复杂真实交通状况中测量目标难以确定。
在线方法对所使用的在线测速标准装置提出了极高的要求。除了需要满足参考文献[13]中提到的固定式在线测速标准装置所要求的同一时刻、同一位置和同一测量目标的三“同”设计外,用于检定的在线测速标准装置还需要设计成便携移动式,以满足能够根据待检机动车测速仪的安装位置而置于相应的现场检定位置,并且还需要考虑安装简便快捷且安装偏差对测量结果的影响可以修正。
2.2 工作原理
根据要求,研制的移动式在线测速标准装置(以下简称标准装置)如图2所示。标准装置可以根据待检机动车测速仪的安装位置而放置于相应的现场检定位置,以确保标准装置和待检机动车测速仪的速度测量区域保持一致。标准装置采用频移键控(FSK)调制发射信号和单发多收天线结构的多目标三维跟踪雷达工作原理,配有高清相机以对测量目标进行拍照取证并对其号牌进行识别,以确保标准装置和待检机动车测速仪测量目标的同一性。
如图2所示,标准装置通过发射FSK调制信号以计算回波多普勒信号的相位差来测量目标车辆的距离R,并通过多接收天线干涉原理来测量目标车辆的角度γ,以此来计算并确定目标车辆的位置。此外,标准装置通过多普勒频移原理来测量目标车辆的径向速度,并通过所测量的目标车辆角度值γ自动修正余弦效应补偿角度,以此来计算目标车辆的行驶速度v。
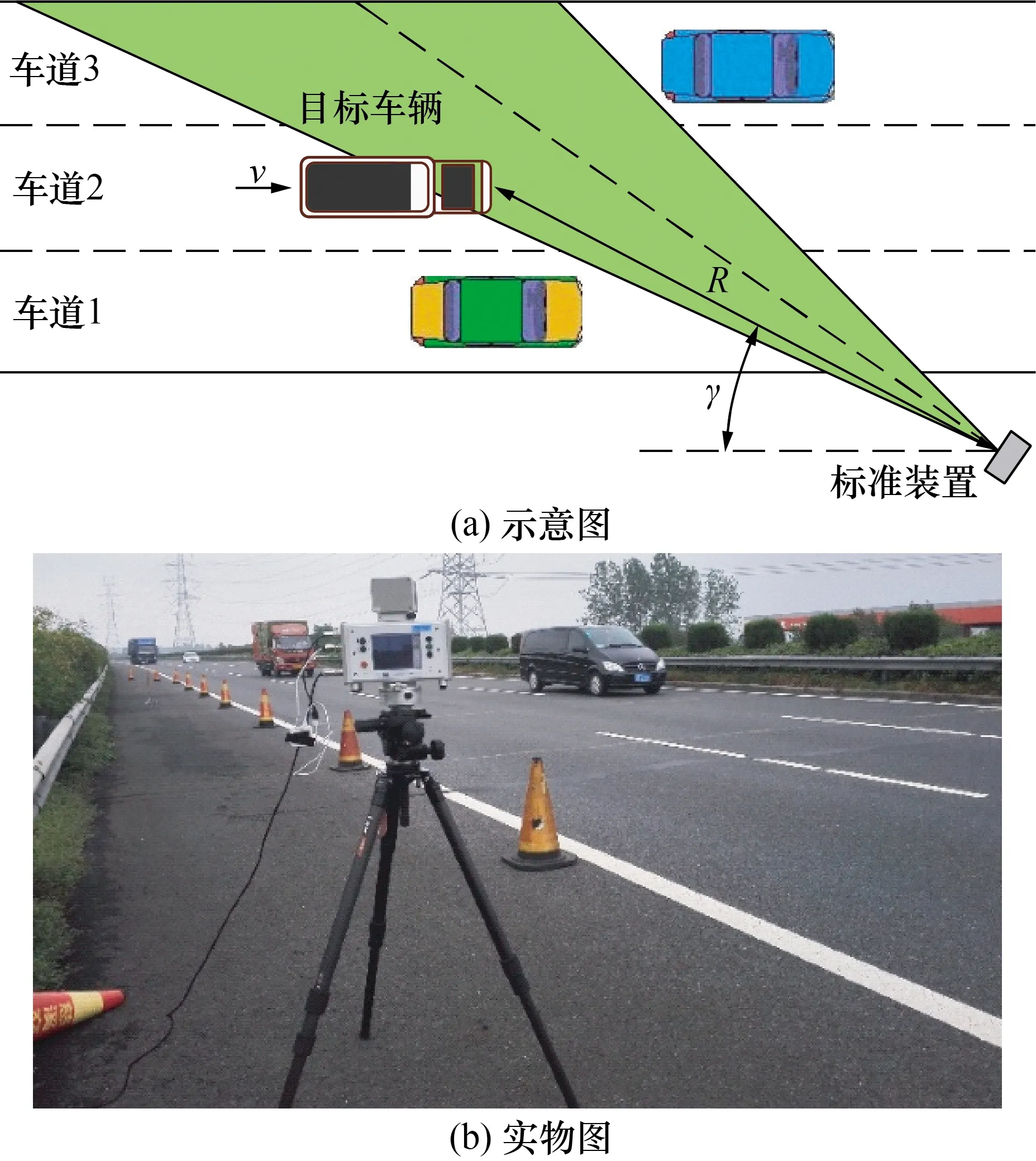
图2 标准装置工作图
2.2.1 速度测量原理
为了跟踪目标车辆在测量区域内的速度值以判断其运动状态,同时提高距离测量精度和避免距离模糊问题,标准装置采用4FSK调制方式,依次发射频率值分别为f0,f1,f2和f3的微波信号sT(t):
(1)
式中:β0,β1,β2和β3分别为对应频率发射信号的初始相位;Ta为脉冲重复周期;n为自然数。经目标车辆反射后,收到的回波信号sR(t)与发射信号sT(t)进行混频和滤波,得到多普勒频移信号sd(t):
sd(t)=
(2)
式中:R0(t),R1(t),R2(t)和R3(t)分别为对应频率发射信号时标准装置与目标车辆之间的距离;C为电磁波在空气中的传播速度。
对多普勒频移信号sd(t)的相位求导后,可以求得多普勒频率fd0,fd1,fd2和fd3分别为:
(3)
式中:γ0,γ1,γ2和γ3分别为对应频率发射信号时标准装置与目标车辆在距离方向上的角度,可通过后面介绍的多接收天线干涉原理进行实时测量。
根据式(4)可以分别计算出不同发射频率时的目标车辆行驶速度测量值vm0,vm1,vm2和vm3:
(4)
由式(4)可以看出,标准装置可以对进入其测量区域内的目标车辆的行驶速度进行实时跟踪测量,因此可以对目标车辆在测量区域内的运动状态进行判断。如果速度测量值vm0,vm1,vm2和vm3之间的差值大于预先设置的最大允许偏差时,表明该目标车辆在测量区域内可能出现加速、减速或变道等非理想测量运动状态,意味着该目标车辆在测量区域内的行驶速度值不是均匀分布的[13],此时该目标车辆不能作为有效的测量目标。只有当目标车辆在测量区域内的多次速度测量值之间的差值小于最大允许偏差时,该目标车辆在测量区域内的行驶速度值被认为是均匀分布的,此时该目标车辆才能作为在线检定有效的测量目标。
2.2.2 距离测量原理
标准装置通过发射4FSK调制信号sT(t)以计算回波多普勒信号sd(t)的相位差来测量目标车辆的距离R。根据式(2)可以分别计算出不同发射频率时的多普勒频移信号的相位差Δφd01,Δφd02和Δφd03:
(5)
根据图2以及式(1)和式(3),式(5)可表示为:
(6)
根据式(6)可计算出目标车辆初始距离R0的3个测量值R01,R02和R03:
(7)
由式(5)和式(6)可以看出,相位差Δφd01,Δφd02和Δφd03均为周期为2π的周期性函数。这意味着式(7)中的目标车辆初始距离的3个测量值R01,R02和R03均不是唯一确定的,而存在着距离模糊问题,其中不模糊的目标车辆初始距离测量范围R01amb,R02amb和R03amb分别为:
(8)
因此,为了得到唯一确定的目标车辆初始距离R0的测量值,标准装置采用4FSK调制方式,通过式(7)中的3个测量值R01,R02和R03来计算目标车辆初始距离测量平均值Rm:
(9)
需要说明的是:除了标准装置采用相位差Δφd01,Δφd02和Δφd03来计算目标车辆初始距离测量值R01,R02和R03之外,还可利用式(2)中的相位差Δφd12,Δφd13或Δφd23来计算初始距离测量值R12,R13或R23。由式(7)和式(8)可以看出:发射频率值之间的差值越大,距离测量精度就会越高,但不模糊的距离测量范围会越小。因此,需要根据所调制的发射频率值、所要求的距离测量精度与范围等多种因素来选择式(2)中相位差组合,以测量目标车辆的距离R。
2.2.3 角度测量原理
标准装置通过多接收天线干涉原理来测量目标车辆的角度γ。如图3所示,标准装置采用单天线发射(图3中TT)、双天线接收(图3中TR1和TR2)的收发分置天线结构,通过计算2个接收天线TR1和TR2所接收到的回波信号相位差,来测量目标车辆在距离方向上的角度γ。
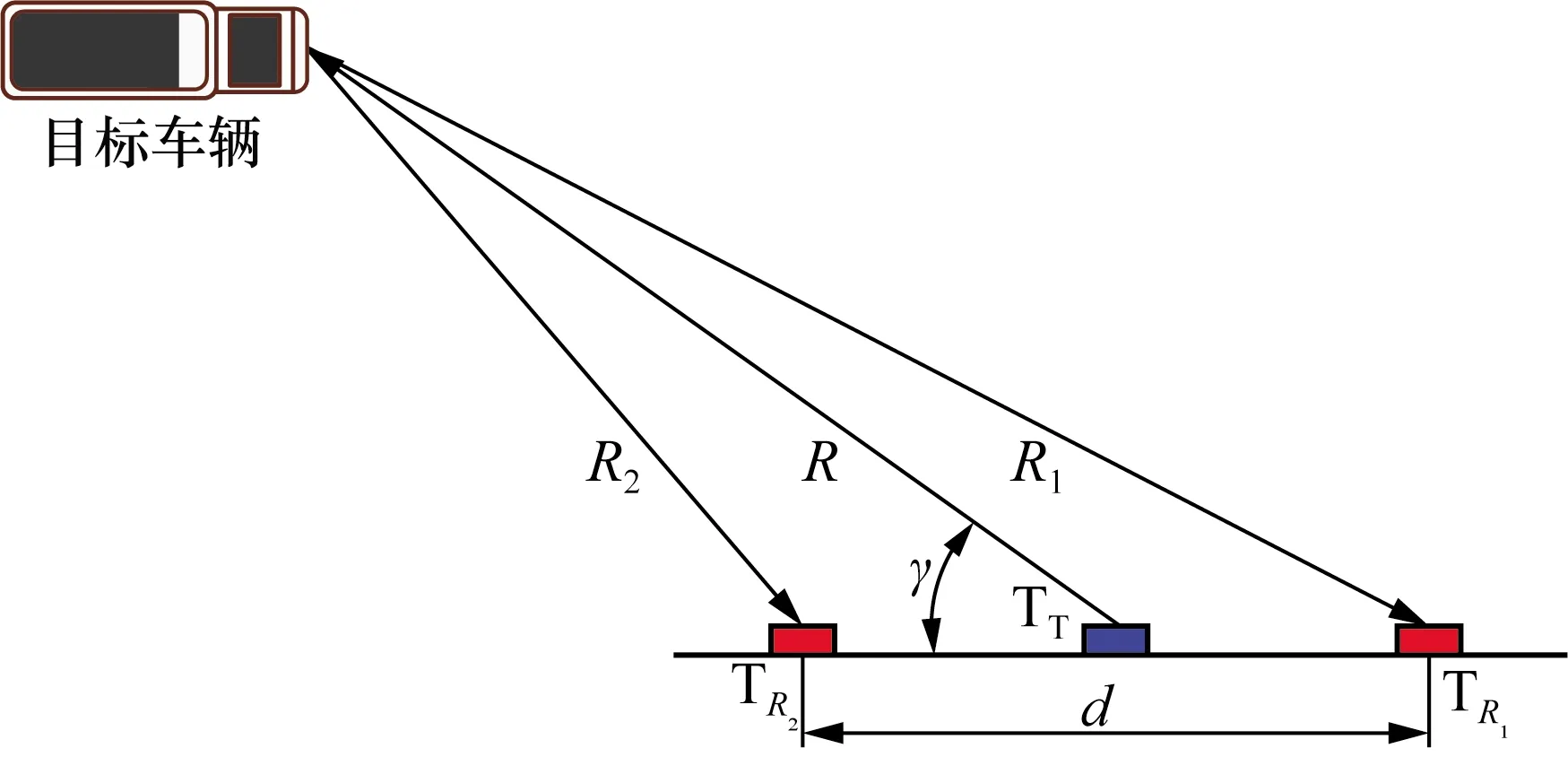
图3 双接收天线干涉角度测量原理图
如图3所示,当标准装置的2个接收天线的间距d满足远远小于其到目标车辆的距离R时,2个接收天线TR1和TR2到目标车辆的距离R1和R2可分别表示为:
(10)
则2个接收天线到目标车辆的距离差为:
R1-R2=dcosγ
(11)
当2个接收天线到目标车辆的距离差R1-R2小于波长λ的1/2时,R1-R2还可以通过2个接收天线的信号相位差Δθ表示:
(12)
根据式(11)和式(12),可测量出目标车辆在距离方向上的角度γ:
(13)
由于标准装置采用4FSK调制方式,依次发射频率值分别为f0,f1,f2和f3的微波信号,因此根据式(13),对应频率发射信号时标准装置与目标车辆在距离方向上的角度γ0,γ1,γ2和γ3为:
(14)
式中:Δθ0,Δθ1,Δθ2和Δθ3分别为对应频率发射信号时标准装置2个接收天线的信号相位差。
将式(14)中的角度γ0,γ1,γ2和γ3测量结果分别代入到式(4)中的对应位置处,则可计算出不同发射频率时的目标车辆行驶速度测量值vm0,vm1,vm2和vm3。
标准装置没有采用常规机动车雷达测速仪中的角度近似方式[14],而是通过干涉原理实时测量,故标准装置的速度测量值中不存在由于角度近似所引入误差分量[14],因此标准装置的速度测量值更为精确,并且可以对现场安装偏差对速度测量值的影响进行修正。根据机动车雷达测速仪检定规程[1,2]中的要求,标准装置所设计的主要技术参数如表1所示。
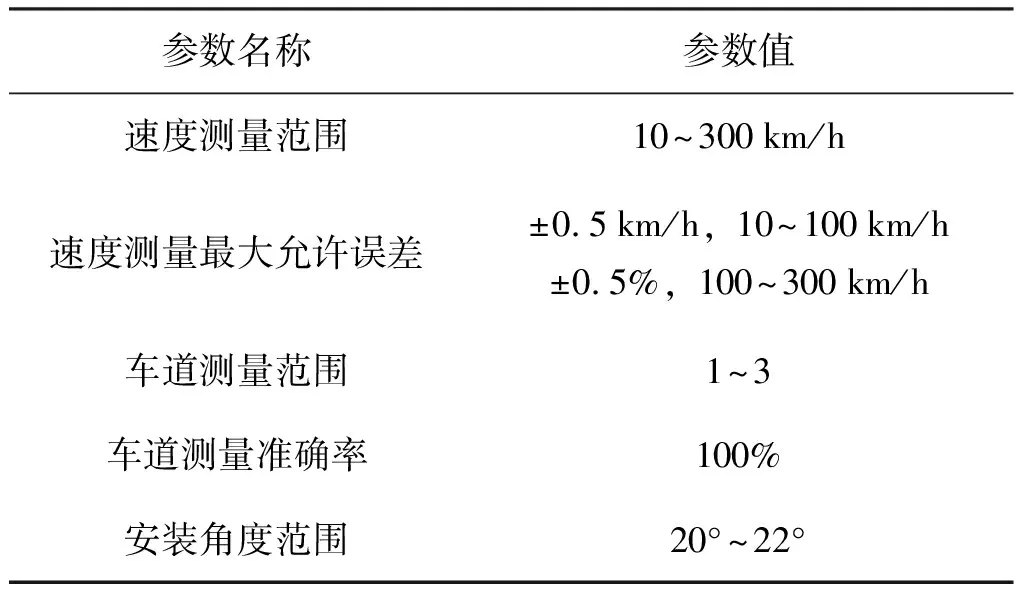
表1 标准装置的主要技术参数
标准装置通过配备的高清相机对每次在线测量结果进行拍照取证,同时将测量结果中的关键测量信息标记在取证照片中并进行存储。图4中所示的是典型的在线测量结果取证照片。在所示的取证照片中有多辆社会车辆,标准装置会在其所测量的目标车辆位置处做标记,并在标记下方注明其所测量的标准速度值。同时在照片上方的测量结果汇总中注明本次测量的时间、地点以及目标车辆的标准速度值、所在车道和车牌号码等关键测量信息,用于与待检机动车测速仪的测量结果进行匹配和对比,以评价待检机动车测速仪的在线测量性能。

图4 在线测量结果示例
3 溯源方法与不确定度评定
3.1 溯源方法
由第2.2.1节的速度测量原理可知,标准装置是通过测量发射信号频率与回波信号频率之间的差值,即多普勒频率,来计算目标车辆的行驶速度值,因此标准装置速度测量值可直接溯源到多普勒频率,通过多目标运动速度模拟器(以下简称模拟器)产生对应的标准多普勒频率值来评价其速度测量结果的准确性和一致性。
标准装置速度测量值的溯源方法如图5所示。首先,调整标准装置(图5中A)与模拟器(图5中B)之间的相对位置,确保二者的收发天线处于同一轴线。然后,模拟器接收标准装置所发射的微波信号,并根据标准速度值所对应的标准多普勒频率值和目标车辆的运动方向对其进行调制。最后,模拟器产生包含了标准多普勒频率信息的回波信号,并将其发射给标准装置,以评价标准装置速度测量值的准确性和一致性。

图5 溯源方法示意图
在标准装置速度量值溯源中,模拟器起到了关键作用,因此必须确保模拟器的技术性能能够满足标准装置的速度量值溯源要求。参照文献[15]中的评价方法和文献[16]中的详细评价过程,模拟器的主要技术参数如表2所示,能够满足表1中所示的标准装置速度量值溯源的要求。
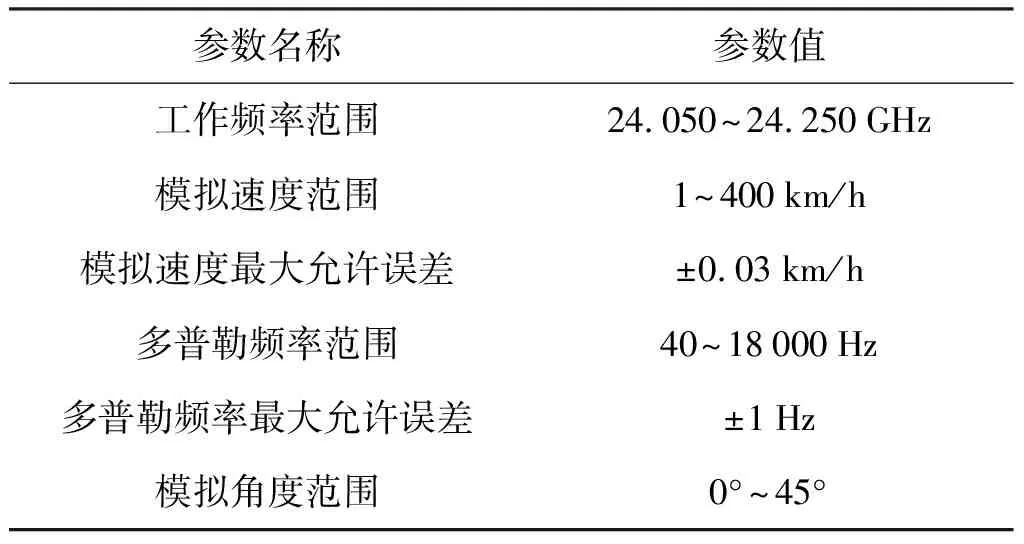
表2 模拟器的主要技术参数
3.2 校准结果与不确定度评定
按照第3.1节提出的溯源方法,本节使用模拟器对标准装置的速度测量值进行校准,并对校准结果进行不确定度评定,以评价标准装置速度测量结果的准确性和一致性。
根据表1中所示的标准装置速度量值溯源要求,选择在10,50,100,150,200,250,300 km/h等7个典型的速度校准点进行校准,每个速度校准点进行10次重复测量,速度校准结果如表3所示。
由表3可以看出,在10~300 km/h的速度测量范围内,标准装置的速度测量误差均在-0.20~0.10 km/h范围内。
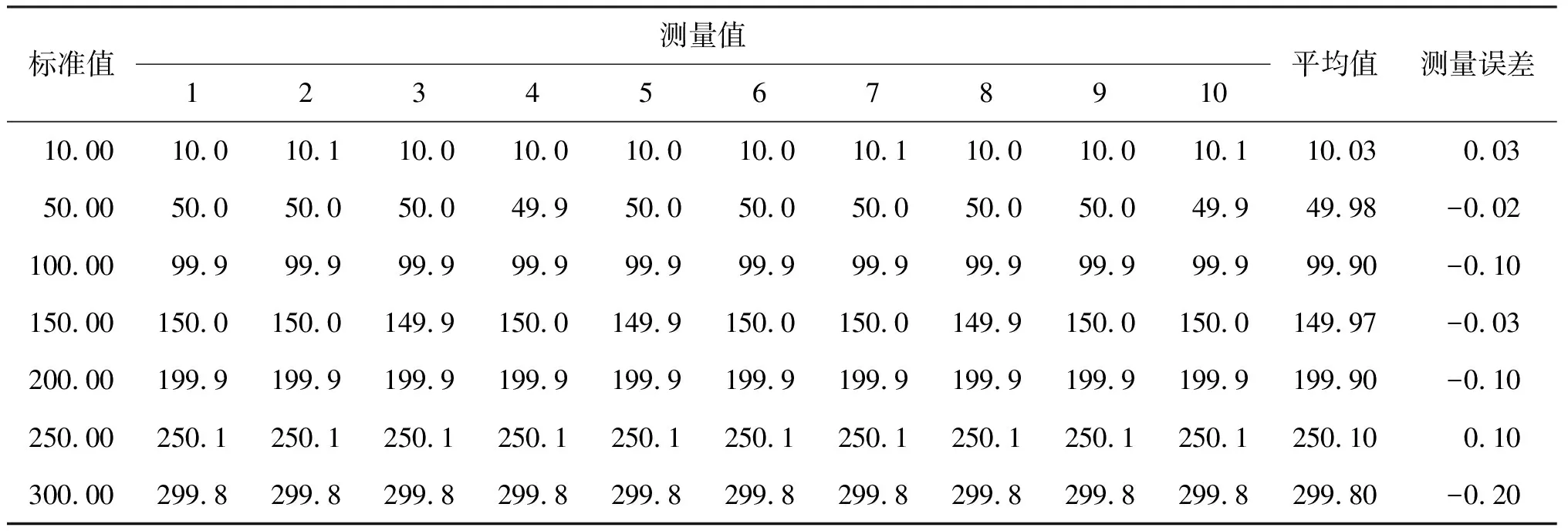
表3 标准装置速度校准结果
参照参考文献[17]中所采用的机动车雷达测速仪模拟速度测量误差不确定度评定方法,主要从10次速度测量结果的重复性、标准装置速度测量值的分辨力以及模拟器的模拟速度最大允许误差等3个方面对标准装置速度测量误差进行不确定度评定,评定结果如表4所示。
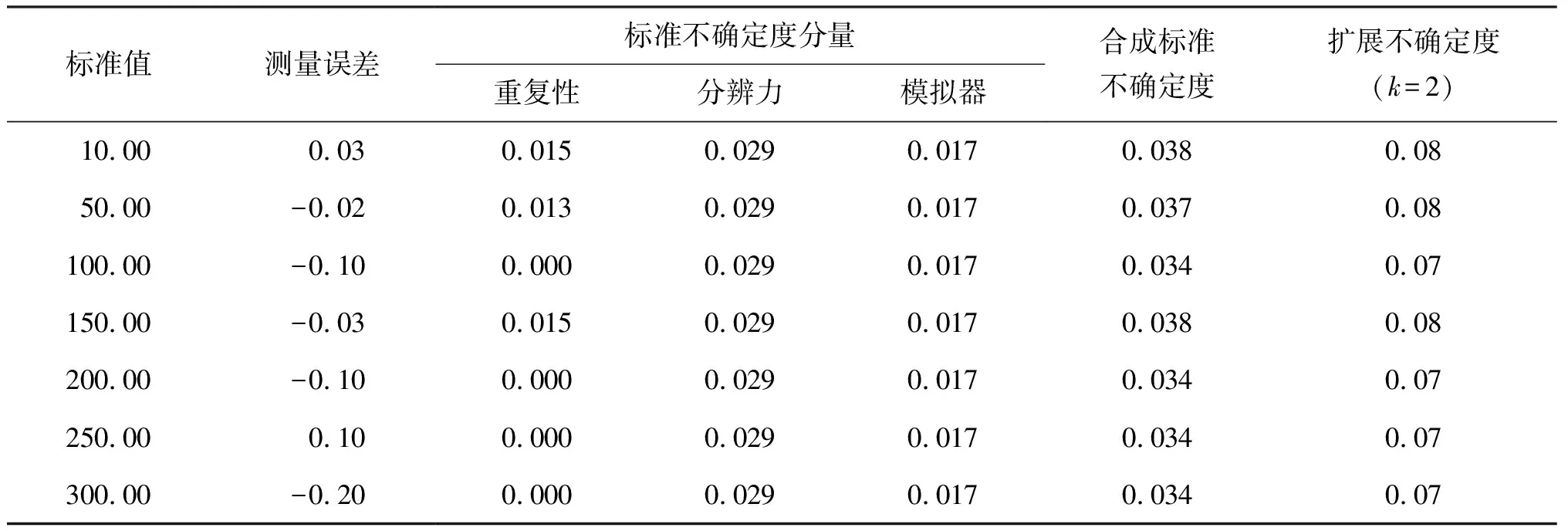
表4 速度测量误差的不确定度评定
由表4可以看出,在10~100 km/h的速度测量范围内扩展不确定度均不超过0.1 km/h(k=2),在100~300 km/h的速度测量范围内相对扩展不确定度均不超过0.1%(k=2),均未超过表1中标准装置的速度测量最大允许误差区间半宽的1/3。因此,在10~300 km/h的速度测量范围内,标准装置的速度测量误差均在-0.20~0.10 km/h范围内,能够满足表1中的速度测量最大允许误差的设计要求。
4 现场比对验证与数据分析
为了验证标准装置在真实交通流量状况下的在线测速性能,将其与固定式在线测速标准装置[13]进行大样本社会车辆的现场比对试验。
如图6所示,调整标准装置的安装位置和安装角度,使其测量区域与固定式在线测速标准装置中编号为1,2和3的3套现场标准测速仪[13]的测量区域保持一致。
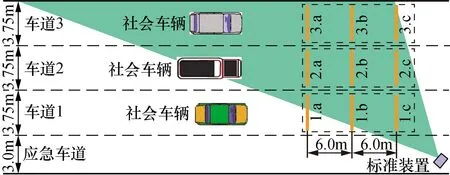
图6 现场比对试验示意图
以固定式在线测速标准装置的速度测量值和车道位置测量结果为参考值,将标准装置的测量结果与参考值进行对比,以计算标准装置在真实交通流量状况下的现场测速偏差和车道测量准确率。
为了减小由于目标车辆在测量区域内行驶速度值不均匀造成的偏差,本次现场比对试验仅选取在测量区域内行驶速度变化量不超过±0.3 km/h的目标车辆。现场比对试验结果如图7所示,汇总统计如表5所示。在本次现场比对试验中,3条车道共获得了702辆目标车辆的现场测量数据,最低速度值为61.29 km/h,最高速度值为129.26 km/h,平均速度值为93.40 km/h,各车道的详细数据如表5所示。
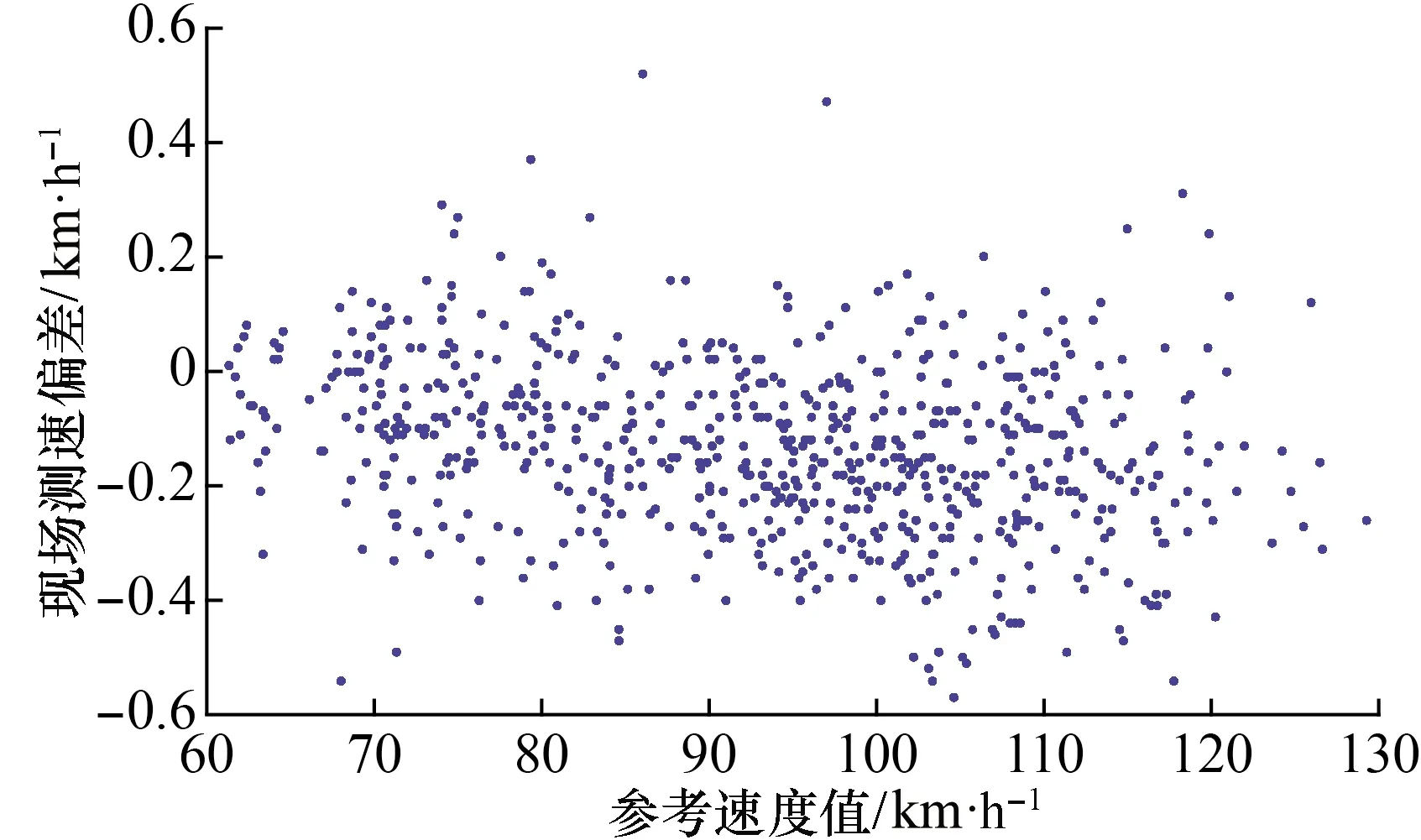
图7 现场比对试验结果
由表5可以看出,标准装置能够对3条车道上的目标车辆进行测量,并且车道测量准确率为100%,因此标准装置在真实交通流量状况下的车道测量范围和准确率能够满足表1中的设计要求。
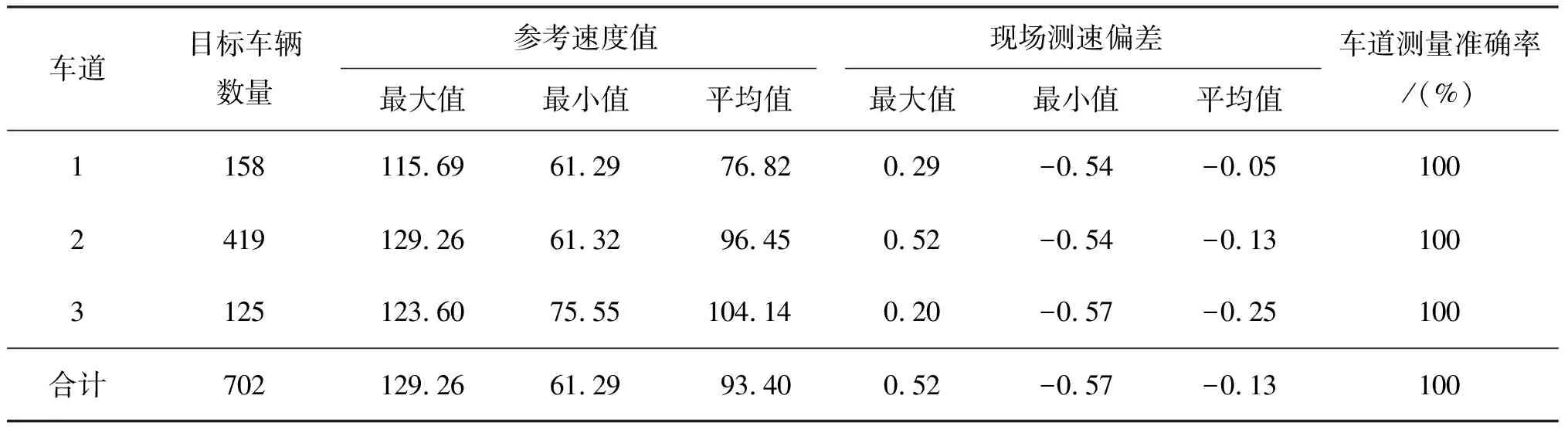
表5 现场比对试验结果汇总统计
由图7和表5可以看出,标准装置与固定式在线测速标准装置对702辆目标车辆的现场测速偏差分布在-0.6~0.6 km/h的范围内,其中:最大偏差值为0.52 km/h,最小偏差值为-0.57 km/h,平均偏差值为-0.13 km/h,各车道的详细偏差数据如表5所示。考虑到固定式在线测速标准装置的相对扩展不确定度[13]以及目标车辆速度变化量的影响,标准装置在真实交通流量状况下的现场测速误差能够满足表1中的速度测量最大允许误差的设计要求。
5 结 论
本文研制了一套基于多目标三维跟踪雷达的移动式机动车在线测速标准装置,为基于真实交通流量状况的在线检定方法在机动车测速仪现场实车检定中的大范围推广与应用奠定了基础。通过实验室全量程模拟校准试验结果及与固定式机动车在线测速标准装置在真实交通流量状况下的大样本现场比对试验结果,验证了标准装置的速度测量误差在10~100 km/h测量范围内为±0.5 km/h,在100~300 km/h测量范围内为±0.5%,车道测量准确率可达到100%,能够满足检定规程中对现场测速标准装置的技术要求[1,2]。
