模糊PID控制在液压缸速度控制系统中的应用
2022-05-11卓浩铖李万莉
卓浩铖 李万莉


[摘 要]液压缸速度控制系统存在许多非线性因素,经典的PID控制器往往因参数整定不良,性能欠佳,导致控制效果不如人意。针对经典的PID控制器参数无法实时调整的缺陷,文章研究了1种模糊PID控制算法,利用模糊控制鲁棒性强,不需要依赖精确数学模型的优点,通过变论域与模糊推理的结合,实现了令人满意的PID控制。通过MATLAB仿真,验证了所设计的模糊PID控制系统比经典PID控制系统响应更快,超调更小,系统更平稳。
[关键词]模糊控制;PID控制;变论域;液压缸速度控制
[中图分类号]TP13 [文献标志码]A [文章编号]2095–6487(2022)03–00–03
Application of Fuzzy Pid Control in Hydraulic Cylinder Speed Control System
Zhuo Hao-cheng,Li Wan-li
[Abstract]There are many nonlinear factors in the hydraulic cylinder speed control system. The classical PID controller often has poor parameter setting and poor performance, resulting in unsatisfactory control effect. Aiming at the defect that the parameters of the classical PID controller cannot be adjusted in real time, this paper studies a fuzzy PID control algorithm, which takes advantage of the strong robustness of fuzzy control and does not need to rely on accurate mathematical models. Through the combination of variable universe and fuzzy reasoning, Satisfactory PID control is achieved. Through MATLAB simulation, it is verified that the designed fuzzy PID control system has faster response, smaller overshoot and more stable system than the classical PID control system.
[Keywords]fuzzy control; PID control ;variable universe; hydraulic cylinder speed control
液压缸在液压系统是重要的执行元件,因其结构简单,制造方便,工作稳定可靠,在机床、工程机械、压铸机械、注塑机械等领域有着广泛的应用。但液压缸的速度控制系统存在很强的非线性,经典的PID控制難以取得满意的结果,而模糊控制系统采用人的思维模式,可不依赖精确的数学模型,大幅减弱干扰和参数变化对控制效果的影响,尤其适用于这种非线性、时变和滞后的控制系统。
1 液压缸速度控制系统数学模型的建立
液压缸的速度控制系统种类有很多,本文以单杆活塞缸伺服阀出口节流控制为例,其简化模型如图1所示。液压缸的负载抽象为单自由度的带阻尼弹簧质量系统,并且忽略库伦摩擦。
伺服阀通常情况下可描述为高频二阶环节,其传递函数[1]可用式(1)表示:
(1)
式中,xv为伺服阀的开度,u为输入控制电压,Kv为伺服阀增益,ωv为伺服阀固有频率,ζv为伺服阀阻尼比。
伺服阀节流口的流量方程可用式(2)表示:
(2)
式中,Q为流过伺服阀节流口的流量,Cd为流量系数,W为伺服阀节流口的面积梯度,P2为液压缸有杆腔的压力,ρ为流体的密度。
在稳态处,设伺服阀的开度为xv0,流过伺服阀节流口的流量为Q0,液压缸有杆腔的压力为P20,则式(2)在此工作点处的线性增量化方程如式(3)所示:
ΔQ=KxΔxv+KyΔP2 (3)
式中,,
液压缸的流量连续性方程可用式(4)表示:
(4)
式中,Ex为弹性模量,V2为液压缸有杆腔容积,A2为液压缸有杆腔的有效作用面积,C1,C2分别为液压缸内、外泄漏系数,P1为液压缸无杆腔压力
液压缸活塞杆的动力学方程可用式(5)表示:
(5)
式中,y为液压缸活塞的位移,M为液压缸活塞组件及负载折算到活塞上的总质量,A1为液压缸无杆腔的有效作用面积,D为活塞组件的阻尼系数,C为负载弹簧的刚度,FL为作用在活塞组件上外负载力。
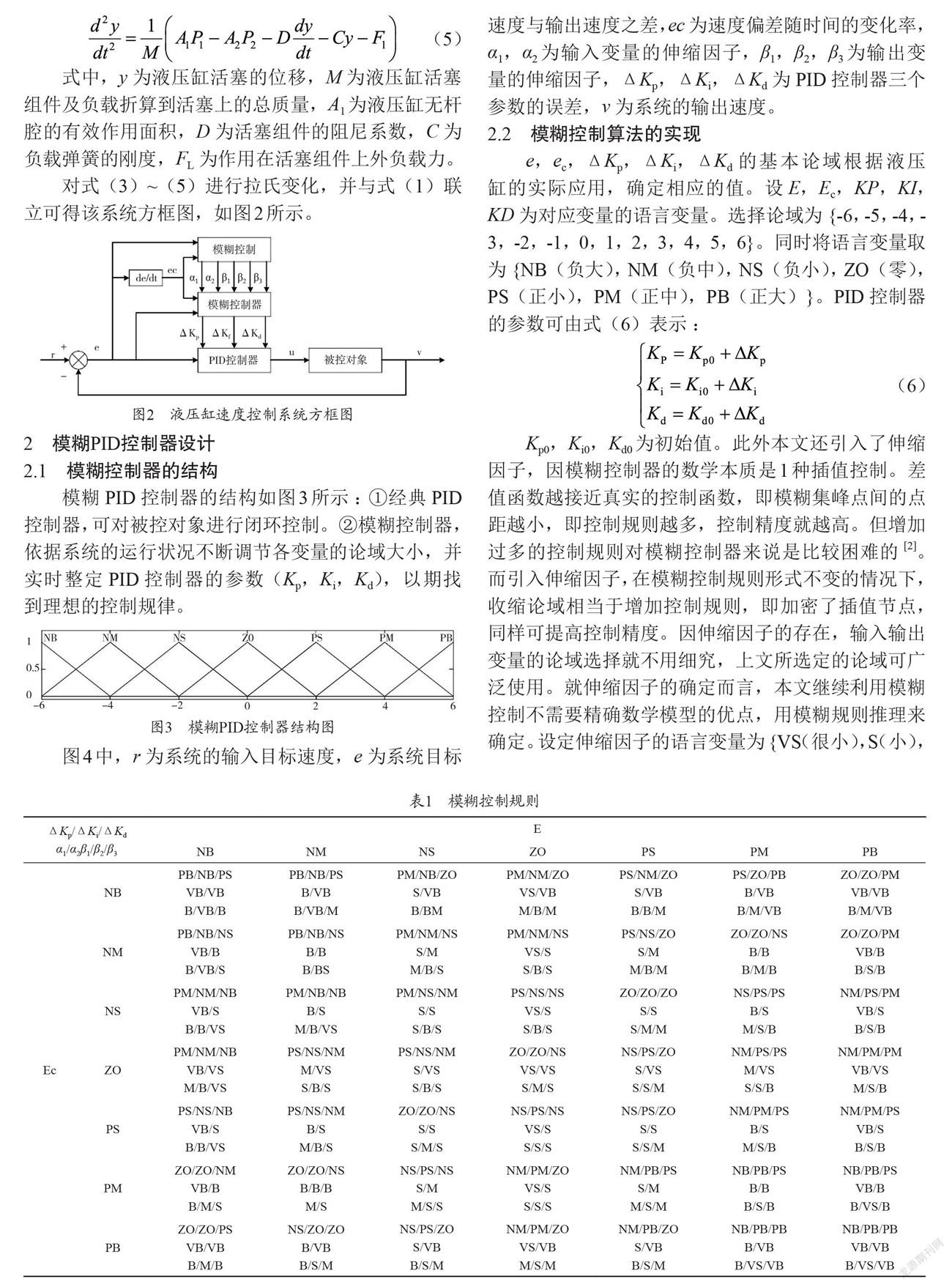
对式(3)~(5)进行拉氏变化,并与式(1)联立可得该系统方框图,如图2所示。
2 模糊PID控制器设计
2.1 模糊控制器的结构
模糊PID控制器的结构如图3所示:①经典PID控制器,可对被控对象进行闭环控制。②模糊控制器,依据系统的运行状况不断调节各变量的论域大小,并实时整定PID控制器的参数(Kp,Ki,Kd),以期找到理想的控制规律。
图4中,r为系统的输入目标速度,e为系统目标速度与输出速度之差,ec为速度偏差随时间的变化率,α1,α2为输入变量的伸缩因子,β1,β2,β3为输出变量的伸缩因子,ΔKp,ΔKi,ΔKd为PID控制器三个参数的误差,v为系统的输出速度。
2.2 模糊控制算法的实现
e,ec,ΔKp,ΔKi,ΔKd的基本论域根据液压缸的实际应用,确定相应的值。设E,Ec,KP,KI,KD为对应变量的语言变量。选择论域为{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6}。同时将语言变量取为{NB(负大),NM(负中),NS(负小),ZO(零),PS(正小),PM(正中),PB(正大)}。PID控制器的参数可由式(6)表示:
(6)
Kp0,Ki0,Kd0为初始值。此外本文还引入了伸缩因子,因模糊控制器的数学本质是1种插值控制。差值函数越接近真实的控制函数,即模糊集峰点间的点距越小,即控制规则越多,控制精度就越高。但增加过多的控制规则对模糊控制器来说是比较困难的[2]。而引入伸缩因子,在模糊控制规则形式不变的情况下,收缩论域相当于增加控制规则,即加密了插值节点,同样可提高控制精度。因伸缩因子的存在,输入输出变量的论域选择就不用细究,上文所选定的论域可广泛使用。就伸缩因子的确定而言,本文继续利用模糊控制不需要精确数学模型的优点,用模糊规则推理来确定。设定伸缩因子的语言变量为{VS(很小),S(小),M(中),B(大),VB(很大)}。则论域可用式(7)表示:
(7)
E0,Ec0,KP0,KI0,KD0为初始论域。隶属度函数本文选取经典的三角形函数,如图4所示。伸縮因子的模糊集合{VS,S,M,B,VB}对应的峰点值则设定为{0.2,0.4,0.6,0.8,1}。
PID参数的控制思想:在偏差较大时,以消除误差为主;在偏差较小时,以维持系统的稳定为主[3]。
伸缩因子的控制思想:当偏差较大时,适当增大伸缩因子,尽快消除偏差;当偏差较小时,则适当减小伸缩因子,收缩论域,相对增加模糊控制规则,抑制超调和振荡。结合现场调试的经验,可得ΔKp,ΔKi,ΔKd,α1,α2,β1,β2,β3的模糊控制规则见表1。
3 仿真分析
查阅文献,液压缸速度控制系统的传递函数[4]以式(8)为例:
(8)
激励源采用幅值为1.0的阶跃信号。在Simulink中进行仿真,得到的结果如图5所示:
其中虚线表示经典PID控制的响应曲线,实线表示模糊PID控制的响应曲线。从仿真结果可知:采用经典PID控制的系统阶跃响应的上升时间,最大超调量,调整时间分为0.8s,20%,9.2 s;而采用模糊PID控制相应的值为0.15s,2%,0.7 s。可见模糊PID控制无论在动态性能还是稳态性能上都比经典PID控制更佳,优势十分明显。
4 结语
本文针对常规PID控制难以满足液压缸速度控制系统的要求的问题,构建了该系统的数学模型,推导了传递函数,并设计了1种模糊PID控制算法,同时引入伸缩因子,提供了1种确定伸缩因子的算法。通过Simulink仿真,结果表明本文设计的模糊PID控制算法具有响应快,超调小,稳态性能好的优点,在液压缸速度控制系统中表现出色。
参考文献
[1] 路甬祥,胡大纮.电液比例控制技术[M].北京:机械工业出版社,1988.
[2] 李洪兴.模糊控制的插值机理[J].中国科学E辑:技术科学,1998.
[3] 李万莉,朱福民,欧阳文志.机电液控制基础理论及应
用[M].上海:上海科学技术出版社,2015.
[4] 俞良英.变异模糊神经网络算法在压铸机PID闭环压射系统中的应用[J].铸造,2016,65(5):5.
