基于行人保护法规和NCAP评价的 试验精度分析
2022-05-10徐世平漆岸凌
张 帆,徐世平,李 帆,邹 阳,漆岸凌
(中汽研汽车检验中心(武汉)有限公司,湖北 武汉 430050)
为了降低汽车对行人的碰撞伤害,各国法规和新车碰撞测试(New Car Assessment Program, NCAP)评价规程均将汽车行人保护性能纳入重点考核项目。行人保护法规ECE R127、EC78/2009、GTR9及E-NCAP、C-NCAP新车评价规程等相继发布并逐步得到完善,按照其规定的划线和选点原则将汽车前端划分为头型和腿型试验区域,其中头型试验主要是冲击发动机罩和风窗区域,腿型试验主要是冲击前保险杠区域。头型和腿型试验均是以自由飞行状态冲击目标点,头型或腿型的冲击速度、角度和位置的精度对试验结果有重大影响,试验失败往往都是试验精度不满足要求所致,因此,展开对行人保护试验精度的精度十分重要。
本文基于行人保护法规及NCAP评价规程对行人保护冲击模块的冲击速度、角度和位置的不同要求,利用电磁式行人保护冲击设备,对行人 保护头型和小腿的试验精度展开研究,分析了重力、摩擦、冲击器形状、汽车前部造型等因素对冲击速度、角度和位置的影响,并提出了一种保障冲击速度、角度和位置精度的补偿方法。
1 各国法规及NCAP评价规程的试验精度要求
1.1 行人保护头型试验精度要求
行人保护头型包括儿童头型冲击器和成人头型冲击器2种。儿童头型冲击器的重量为(3.5± 0.07) kg,从底板到头型球体顶端的距离为126 mm,成人头型冲击器的重量为(4.5±0.1)kg,从底板到头型球体顶端的距离为136 mm。头型冲击器在冲击时为自由飞行状态,试验前按照法规或NCAP评价规程规定对试验样车进行相应的区域划分,按照表1中的要求选择头型冲击器进行冲击试验。
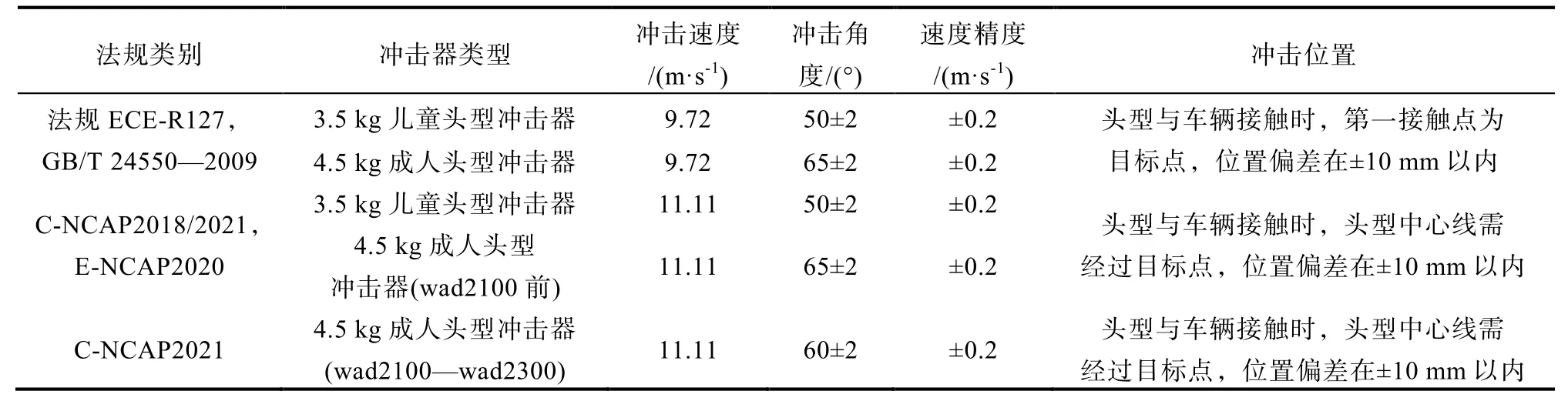
表1 不同法规对于行人头型保护试验精度的要求[1-5]
1.2 行人保护腿型试验精度要求
行人保护腿型根据不同阶段包含TRL刚性腿、Flex-PLI柔性腿、aPLI柔性腿3种,试验前按照法规及NCAP评价规程规定对试验样车进行腿型区域划线,然后根据表2中的相应要求选择腿型冲击器进行冲击试验。

表2 不同法规对于行人腿型保护试验精度的要求
2 行人保护试验精度补偿方法
2.1 头型试验精度的补偿方法
2.1.1 针对NCAP试验的头型试验精度补偿方法
NCAP试验对冲击点的位置要求如图1所示,在头型与车辆发生接触时,头型的中心线需经过目标点I.P。由于头型冲击试验为自由飞行状态,在飞行过程中受到重力因素的影响会偏离设定的飞行轨道,同时受到前罩板表面角度、头形冲击器形状的影响,头型的自由飞行距离与实际测量距离并不一致。为此,要保证头型冲击点的准确性,必须对重力因素、前罩板及头型形状进行必要的补偿,提高试验精度。
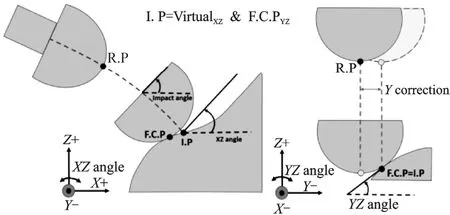
图1 NCAP对冲击点的位置要求
在头型冲击试验中,为保证头型以一定的速度和角度自由飞行冲击目标点,必须用试验设备将头型加速到一定速度后释放,再让头型自由飞行。如图2所示,假设头型加速端距离为10PD,自由飞行距离为42PD,头型厚度为21PD(儿童头型为126 mm,成人头型为136 mm),头型半径为=82.5 mm,冲击器冲击角度与水平面夹角为。另外,为保证冲击点的准确性,试验前采用长度尺测量至的距离为41PD,采用倾角仪测量平面内发动机罩轮廓角度为。
在不考虑重力和球形冲击器形状因素影响的情况下,头型冲击器发射点与冲击目标点的距离公式为

由于冲击器为球形结构,冲击器与机罩前罩板接触时,第一接触点并不是,实际的自由飞行距离为32PD,该点与冲击器的半径、汽车前罩板与水平面的夹角存在如图2所示的关系。因此需要对43PD这一段距离继续补偿。假设在平面内中轴线与球心与接触点连线的夹角为,在考虑球形冲击器际机罩形状因素影响的情况下,头型冲击器发射点与冲击目标点的距离公式为

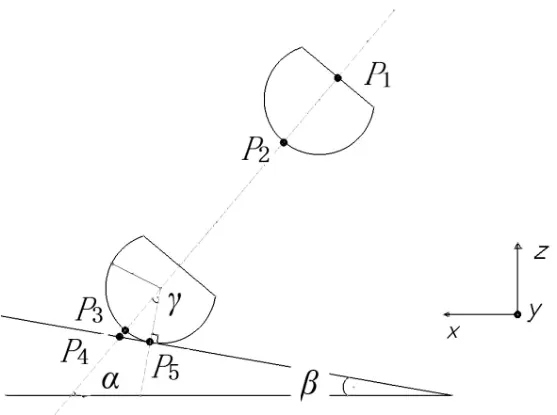
图2 考虑冲击器及机罩形状对精度影响
由于受到重力加速度的影响,头型在自由飞行过程中会偏离设定的运行轨道,造成第一接触点会滞后于目标接触点。为消除重力对冲击的影响,让第一接触点接近目标接触点,可以在冲击试验前将头型冲击器发射点在方向上移动一定距离Δ,在方向移动一定距离Δ,以补偿重力作用下的影响,如图3所示。假设初始速度为,目标速度=11.11 m/s。假设补偿后发射角度为。则考虑重力因素,头型冲击器发射点相对于目标冲击点补偿为

假设Δ=0,则有
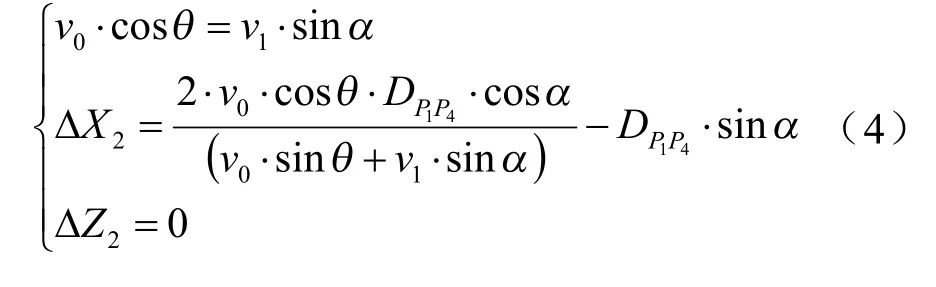

图3 考虑重力对精度影响
若保持头型加速距离D不变,即D=D,则考虑发射加速段的位置补偿,头型冲击器发射点相对于目标冲击点补偿公式为

将补偿坐标值相加,即可得到行人保护头型冲击试验中头型冲击器发射位置相对于目标点需要移动的坐标值。因此针对NCAP试验的头型试验精度补偿方法如下。
(1)冲击角度补偿为。
(2)冲击速度补偿为=·cos/cos。
(3)发射位置补偿为
采用上述补充方法和公式后,得到如表3所示的结果,C-NCAP头型法规试验结果如图4所示。
设定10PD=650 mm,D=400 mm,得出表3实验结果。从表3结果可知,将补偿公式应用到设备程序后,头型冲击器冲击的精度将有极大程度的改善,冲击第一接触点与目标接触点的偏差将控制在±5 mm以内,冲击速度均在±0.02 m/s以内,冲击角度均在±1°以内。

表3 应用补偿后的C-NCAP头型试验结果
2.1.2 针对ECE-R127法规的头型试验精度补偿方法
ECE-R127法规要求头型与车辆接触时,第一接触点F.C.P与目标点I.P重合,如图4所示。而如图1所示,目标点I.P和第一接触点F.C.P是存在偏差的,因此需要针对图3中目标点与接触点的距离进行补偿。

图4 法规对冲击点的位置精度要求
在考虑球形冲击器及机罩的形状因素影响的情况下,为了减少第一接触点和目标点的偏差,试验前可以在平面内将头型冲击器在方向和方向进行平移,使第一接触点和目标点重合。如图3所示平移的距离即为点和点的坐标差值Δ和Δ。发射点相对于目标冲击点补偿公式为


因此,考虑球形冲击器及机罩的形状影响时,头型冲击器发射点相对于目标冲击点的距离补偿公式为

同理,在平面内假设发动机罩轮廓角度为,球心和接触点连线与中轴线的夹角为,如图5所示。参照平面内方向的补偿公式,在头型冲击器发射点相对于目标冲击点在向上的距离公式见式(11)(12)。
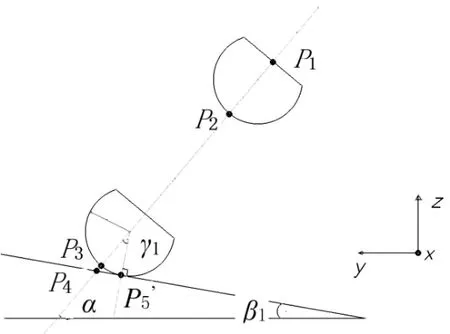
图5 考虑冲击器及机罩形状在Y方向的精度影响

考虑重力及头型加速距离对目标点位置、速度、角度的影响机理相同,因此针对ECE-R127等法规试验,头型试验精度补偿方法如下。
(1)冲击角度补偿为。
(2)冲击速度补偿为=·cos/cos。
(3)冲击位置补偿为

将补偿方式应用到设备程序,并在试验前采用以上所有补偿方式,设定10PD=650 mm,D= 400 mm,得出表4实验结果。综上所述,头型冲击器冲击的精度将有极大程度的改善,冲击第一接触点与目标接触点的偏差将控制在±5 mm以内,冲击速度均在±0.02 m/s以内,冲击角度均在±1°以内。
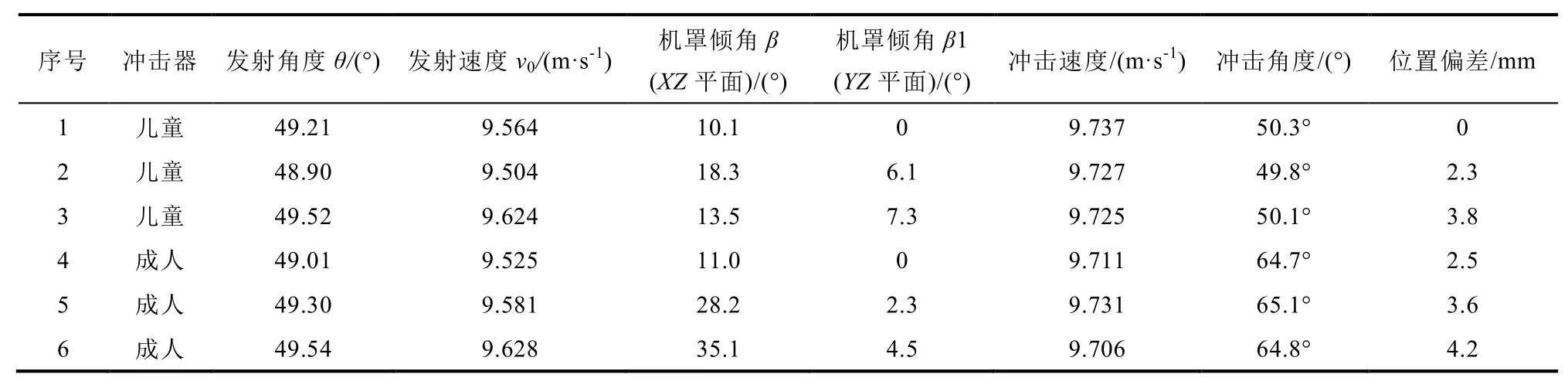
表4 应用补偿后的ECE R127头型试验结果
2.2 行人保护小腿试验的冲击精度
行人保护腿型试验法规ECE R127、E- NCAP2020及C-NCAP2018版均采用Flex-PLI柔性腿,C-NCAP2021则采用仿生性能更好的aPLI腿型。腿型试验中,需要将腿型以要求的速度撞击汽车前保险杠。设定小腿自由飞行水平距离为D,由于受重力影响,需要在实验准备时将小腿发射器发射角度倾斜一定角度,使小腿冲击器的发射速度v与水平面有一定角度,速度在轴方向的分量为v=v·sin,在重力影响下,v在碰撞接触的瞬间降为零,只保留轴方向的分量v=11.11 m/s,使得冲击器在碰撞时满足法规和NCAP冲击角度及冲击速度要求。腿型冲击点位置要求如图6所示。
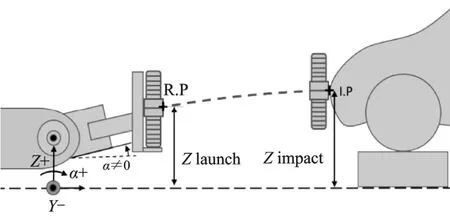
图6 腿型冲击点位置要求


计算得出发射速度为v=v/cos;补偿角度为=arctan(·D/v)。
同时,标准要求在冲击器与汽车前保险杠接触时刻,冲击器底部距离水平地面一定高度,因此在实验准备中将腿型与目标点接触后,将冲击器后退D的同时,还需要将小腿在向下移动一定的距离ΔH,以补偿重力对冲击的影响,补偿高度ΔH满足如下计算式为

设定碰撞时刻腿型冲击器的底部在地面基准平面以上距离为,根据法规及NCAP评价规程要求,对于aPLI腿型而言,=25 mm;对于Flex-PLI腿型,=75 mm。因此腿型冲击器离地面的发射高度为

将补偿方式应用到设备程序,并在实验前应用上述补偿方式,表5中列出了应用补偿后的实验结果。综上所述,腿型冲击器冲击的精度将有极大程度的改善,冲击第一接触点与目标冲击点的偏差将控制在±5 mm以内,冲击速度均在±0.02 m/s以内,冲击角度均在±1°以内。
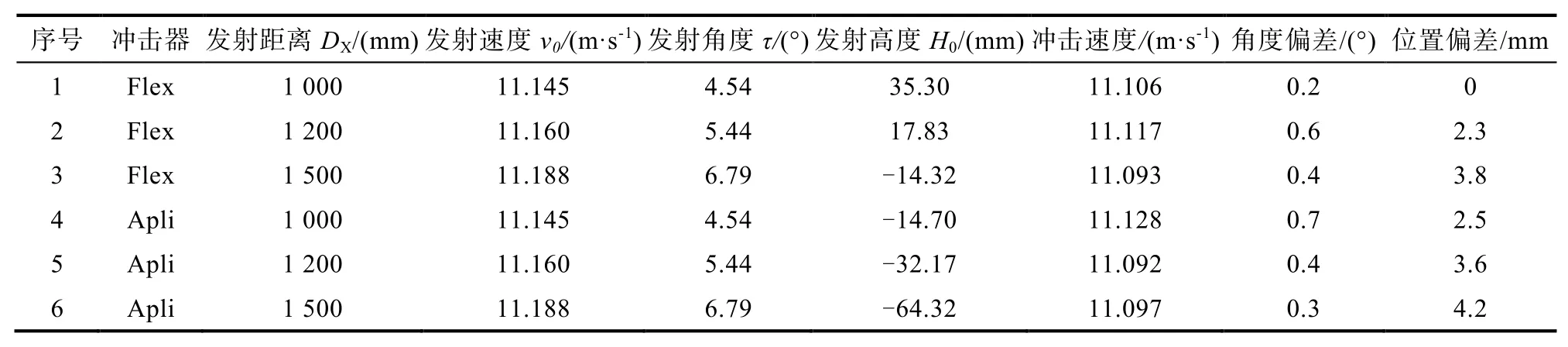
表5 应用补偿后的腿型试验结果
3 结论
基于行人保护法规及NCAP评价规程对行人保护冲击模块的冲击速度、角度和位置的不同要求,分析了重力、摩擦、冲击器形状、汽车前部造型等因素对试验精度的影响,得出一种补偿冲击速度、角度和位置精度的方法,在行人保护试验中加以应用并验证其有效性,可为行人保护冲击设备补偿程序的设定提供一定的参考。
