康复机器人设计分析
2022-05-10杨昭显梁兴波党海钊
杨昭显 梁兴波 党海钊

摘要:该文结合人体生理结构特征,按照人体惯性参数等数据,分析了人体尺寸和关节的活动度,设计一种康复训练机器人,并建立运动机构的运动学和动力学模型,利用ADAMS软件对运动机构进行动力学分析,得出关节处的角度、加速度与时间变化曲线。结果表明:电动推杆的推力在所选择的推力范围内,踏轮电机的输出力矩在合适范围内,验证此模型的可靠性。
关键词:机器人 运动学 电动推杆 可靠性
中图分类号:TP242 文献标识码:A 文章编号:1672-3791(2022)04(a)-0000-00
Design and Analysis of Rehabilitation Robot
YANG ZhaoxianLIANG XingboDANGHaizhao
(1.Zoomlion HeavyIndustry Co.,Ltd., Changsha,Hunan Province,410200 China;2.Liuzhou Wuling Automobile Industry Co., Ltd.,Liuzhou,Guangxi Zhuang Autonomous Region,5453000 China)
Abstract:Combining with the characteristics of human physiological structure, according to the human body inertia parameters such as data, analysis of the human body size and mobility of joints, design a kind of wheeled rehabilitation training robot, and establish the mechanism kinematics and dynamics model of ADAMS software is used to analyse the mechanism dynamics analysis, it is concluded that the Angle of the joints, acceleration and time change curve. The results show that the thrust of the electric push rod is in the selected thrust range, and the output torque of the pedal motor is in the appropriate range, which verifies the reliability of the model.
Key Words: Robot;Kinematics;Electric putter;Reliability
根據数据显示截至2018年,我国老年人口总数达1.56亿人,占总人口的比重达11.19%[1]。随着我国人口老龄化的加剧,以及各类疾病(尤其脑卒中、脊柱受伤)等引起的人体运动功能性障碍的人数不断升高[2]。此外,平均每年有20万人因交通事故等原因,导致不同程度的伤病和残疾[3-4]。面对目前中国康复医疗服务需求巨大的现状,传统的靠人工的康复手段已经远远满足不了康复需求。随着机器人技术在医疗领域的飞速发展,医用机器人以医学理论为依据,可以科学有效的帮助患者逐步恢复运动机能。
1康复机器人模型的建立
根据人体的生理结构、人体惯性参数、关节的活动度、人机工程学等因素,设计一款康复训练机器人,如图1所示。
图1机器人模型
康复机器人的机构设计主要由两部分组成:床体和踏轮。床体由床身和升降平台组成。升降台上座与升降台底座之间通过支撑杆和销轴铰接在一起,电动推杆作为动力源,推动升降机构的上升与下降。床身通过销轴和电动推杆安装在升降平台上座上。
2运动机构力学模型建立
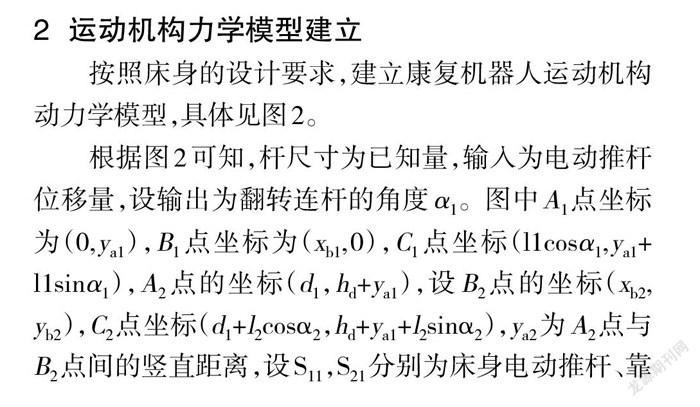
按照床身的设计要求,建立康复机器人运动机构动力学模型,如图2所示。
图2中,杆尺寸为已知量,输入为电动推杆位移量,设输出为翻转连杆的角度α1。图中A1点坐标为(0,ya1),B1点坐标为(xb1,0),C1点坐标(l1cosα1,ya1+l1sinα1),A2点的坐标(d1,hd+ya1),设B2点的坐标(xb2,yb2),C2点坐标(d1+l2cosα2,hd+ya1+l2sinα2),ya2为A2点与B2点间的竖直距离,设S11,S21分别为床身电动推杆、靠背电动推杆的行程,则根据电动推杆参数可得最小安装位置为S1=S11+160,S2=S21+160。
床身机构转角α1与电动推杆长度S1之间的几何关系为:
(1)
则床身电动推杆的行程s11为:
(2)
床身翻转角度的范围为0°~90°,靠背机构转角α2与电动推杆长度S2之间的几何关系:
(3)
靠背翻转角度的范围为0°~90°,图2中对转动副的A1力矩平衡有:Fn1n1=G1n1,其中n1=l1cosβ1,由数学知识和联立上式的关系式:
(4)
(5)
以上关系式为床身受力总成与电动推杆提供的支撑力之间的关系。
3运动机构运动学分析
在ADAMS中建立人机运动机构的简化模型,其中关键构件和人体部位包括:支撑杆、翻转架、电机模块、大腿、小腿。
在进行康复训练时,影响髋关节和膝关节角度变化的因素有大腿长度a,小腿长度b,床的高度h,踏轮电机翻转角度δ,A点到G点在x轴方向上的投影距离,支撑杆长度已定。如果试验取5个变量,每个变量选取3个不相等的值,则需要进行243次试验,工作量变得极大。为了减少工作量,同时又不对结果产生影响,采用正交试验设计。正交试验设计方法是一种用来研究多水平多因素的设计方法[5],它利用试验点的正交性将部分具有代表性的点从全面试验点中挑选出[6]。用正交试验设计是一种快速有效、经济的多变量试验设计方法。患者的大腿长度和小腿长度会成组变化,所以视为一个变量,床的高度已定,踏轮撑杆已定ε角已定。有2个变量,每个变量取3组不同的值,则需要做9次仿真试验。试验中有试验指标和试验因素,即衡量试验效果的特征量和影响试验指标的因素。
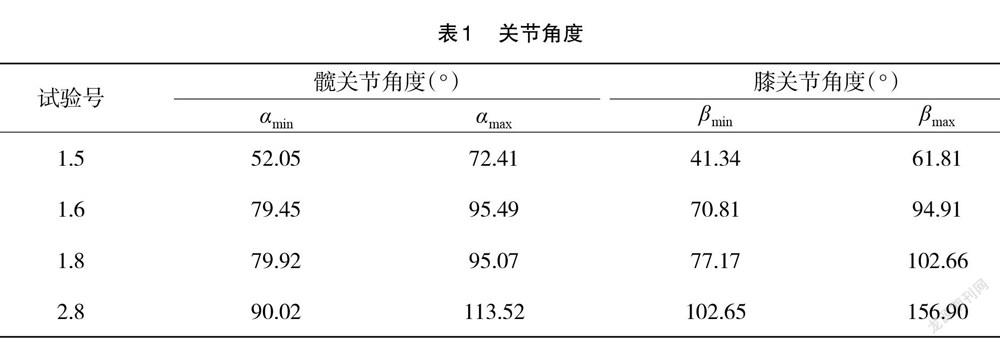
踏轮电机翻转角度δ分别为45°、60°、75°,髋关节A点到G点关于x轴的投影距离分别为635mm、685mm、735mm。在模型处添加驱动,设置角速度为30/s,脚踏转两周需要24s,仿真步数为120步,每次仿真完成后,按照表的数据修改模型构件的位置,再次进行仿真。按照人体坐姿状态下肢关节活动度角度定位,髋关节和膝关节角度仿真结果分别如表1所示。
坐姿人体关节活动范围髋关节:65°~120°,膝关节75°~180°。从表1可得:试验号1.5的髋关节和膝关节的角度都不在坐姿人体关节角度范围内。以上说明在坐姿状态下,电机翻转的角度过大时,改变人与踏轮的水平的距离会影响人体的正常康复训练。试验号1.6、1.8、2.8中的踏轮电机翻转角度都是相同值,说明电机模块的翻转角度δ在一定范围内,增加人体的髋关节与踏轮的水平距离l能使人体的关节角度处于正常范围内。但对于髋关节和膝关节比较脆弱的患者,关节活动范围不宜过大,所以在人体的髋关节与踏轮的水平距离一定时,建议选用小的角度即δ=45°。这样患者在进行康复训练时,髋关节和膝关节的活动度较小,符合下肢康复训练关节的允许变化范围。
图3 髋关节角速度变化规律
由图3可得,髋关节的角度都是先增大再减小,电机在同一翻转角度δ,髋关节的角度随着距离的增大而增大;在同一距离条件下,髋关节的角度随着翻转角度的增大而减小。在同一角度δ条件下,膝关节的角度也隨着距离的增大而增大;在同一距离条件下,膝关节的角度随着距离的增大而减小。腿长较长的人体,膝关节角度先减小后增大。腿长较短的人体,膝关节角度先增大后减小,且出现相对较大的角度。但对于髋关节和膝关节比较脆弱的患者,关节活动范围不宜过大,所以在人体的髋关节与踏轮的水平距离一定时,建议选用小的角度即δ=45°。这样患者在进行康复训练时,髋关节和膝关节的活动度较小,符合下肢康复训练关节的允许变化范围。不同因素条件下,髋关节的角加速度的变化走势相同,试验号1.8膝关节的角加速度变化最大,试验号1.5膝关节的角速度变化最小,其他试验号角速度变化相差不大。由图7可知, 试验号1.8膝关节的角速度变化最大,试验号1.5膝关节的角速度变化最小,试验号1.3角加速度曲线变化相近。试验号1.8的髋关节角加速度小,但膝关节的角加速度大;试验号1.5膝关节角加速度小,但髋关节角加速度大。两者任一角加速度过大不利于病人平缓康复的要求,其中试验号1.5髋关节角度与膝关节角加速度组合相对较小,结合方案可得,可选取l为735mm作为踏轮与床体之间的适宜距离。
4结语
结果表明:电动推杆的推力在所选择的推力范围内;踏轮电机的输出力矩在合适范围内;利用ADAMS仿真分析,真实反映了床身翻转的运动过程;建立了下肢简化模型,并设计了二因素三水平试验的运动学仿真,判断出电机模块在45°时,随着水平距离的变化,男性K95的髋关节与膝关节的角度变化在坐姿人体角度范围内,并分析总结出床体与踏轮间的适宜距离为735mm。
参考文献
[1] 李古强,于守娟,孟永春,等.康复辅助器具服务云平台的构建研究[J].中国卫生事业管理,2019(1):5-8,16.
[2] 刘小方,鲁桂根,庄金贤.残疾人医疗康复现状及对策——以上海市金山区为例[J].海军医学杂志,2019(1):61-64,68.
[3] 华剑.虚拟仿真软件在机械专业教学中的应用实践[J].大学教育,2020(2):14-16.
[4] 陆佳慧.多滚筒动平衡试验台设计及模态分析[J].农机化研究,2020,42(10):9-16.
[5] 吴毅,岳寿伟,窦豆.中国康复医学科学研究的发展历程[J].中国康复医学杂志, 2019(9):1009-1013.
[6] 李春刚,郭辉,沈勇,等.轴承安装与固定的工艺参数研究[J].机械工程师,2020(3):96-97,101.
