低轨星座系统的可控波束到地功率通量密度研究
2022-05-06黄颖李伟简晨严康
黄颖,李伟,简晨,严康
(国家无线电监测中心,北京 100037)
0 引言
近年来,在Google、Amazon和SpaceX等科技巨头公司的推动和支持下,卫星互联网行业迅速发展,旨在为全球用户提供不间断的宽带互联网接入服务,诞生了一批以Starlink、OneWeb和O3b为代表的低轨星座系统[1-2]。低轨星座通信被认为是融合到未来6G之中,实现全球立体泛在覆盖的重要技术[3]。目前,全球公开发布的低轨通信星座系统计划有20多个,其中OneWeb公司申请发射约4.8万颗卫星,SpaceX公司申请发射约4.2万颗卫星[4]。这些星座系统通常具有卫星规模庞大、轨道高度低、波束宽度窄、波束可控等特征,且使用频率集中,都计划使用Ku/Ka/Q/V频段资源,低轨星座系统之间发生有害干扰的概率极大[5]。同时,在这些频段运行着大量静止轨道卫星通信系统,低轨星座系统很有可能会对使用相同频率的其他空间或地面通信系统造成有害干扰[6-8]。
为保护以同等权利共用频段的固定业务或移动业务,《无线电规则》第21.16条中规定了空间电台发射到地球表面的功率通量密度(power flux-density,PFD)的限值[9]。新兴的低轨星座系统的星座构型复杂,星座规模从几十颗到几百颗甚至上千颗不等,覆盖特性能够满足全球任何地点[10]。这些新兴的低轨星座系统采用相控阵天线技术、新型频率复用技术、星上处理技术、功率控制技术、动态频谱共享技术等多种关键技术[11],其用户波束和馈电波束多为可控波束[12]。新兴的低轨星座系统卫星到地的PFD计算需要考虑不同可控角的发射功率和天线参数特性,同时低轨星座系统在Ka/Q/V等频段的PFD限值需考虑星座规模。因此有必要对低轨星座系统可控波束到地PFD计算方法和PFD限值符合性判定方法进行研究。
1 可控波束到地PFD计算方法
《无线电规则》第21.16条中规定,空间电台到地产生的最大PFD不应超过相应业务及频段的限值。这个最大PFD是在自由空间传播条件下获得的。PFD的定义为单位面积通过的功率,因此计算空间电台在地球表面产生的最大PFD需要确定与发射功率和传播距离两个参数相关的变量,如发射功率谱密度、天线方向图和不同仰角传播距离等。空间电台对地发射示例如图1所示,空间电台信号到达地球站所在点的方向与水平面夹角定义为对地到达角θ(即仰角),空间电台到地球站与空间电台到地心的夹角定义为半视角φ。设地球半径为R,卫星与地球站之间的传播距离L和半视角φ可表示为:
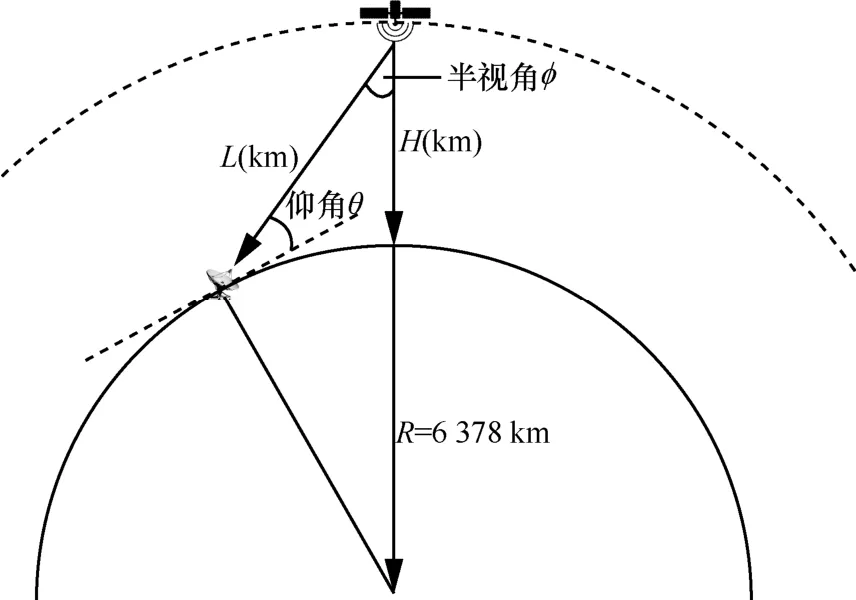
图1 空间电台对地发射示例
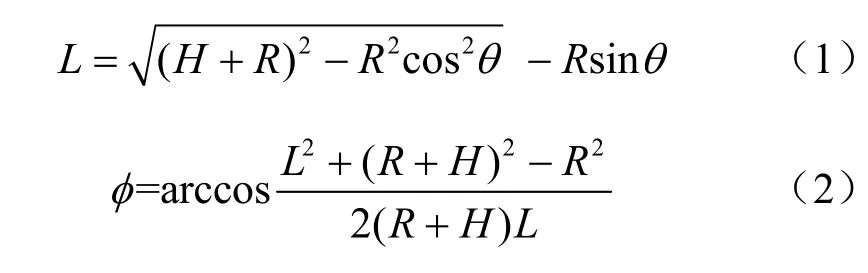
由式(1)、式(2)可知,卫星与地球站之间的传播距离、半视角均与仰角、卫星轨道高度有关。对于低轨星座系统可控波束,当波束指向观察点时,卫星天线可控角正好等于半视角。可控波束通过相控阵天线或机械转动天线实现。若卫星天线为相控阵天线,天线总增益为阵列增益 AG与单元增益 eG之和,阵列增益与单元增益组合形成的相控阵天线方向示意图如图2所示[13],可知不同可控角时天线最大增益Gmaxφ()不同。若卫星天线为机械转动天线,不同可控角最大增益Gmax相同。可控角为φ时的卫星发射功率谱密度P()φ由卫星系统本身决定。比如,Starlink系统采用相控阵天线,通过功率控制算法实现可控波束在不同对地到达角情形的最大PFD恒定不变[14],此时发射功率谱密度P()φ主要由天线增益G()φ和星地传播距离L决定。计算空间电台可控波束在不同水平面到达角θ时的最大PFD,需要获取以下参数信息:可控角φ时的最大发射功率谱密度Pmax()φ、可控角φ时水平面到达角θ方向对应发射天线离轴角ψ、与可控角φ和离轴角ψ相关的天线增益G(φ,)ψ、传输距离L()θ。可控波束的最大PFD计算式如下:
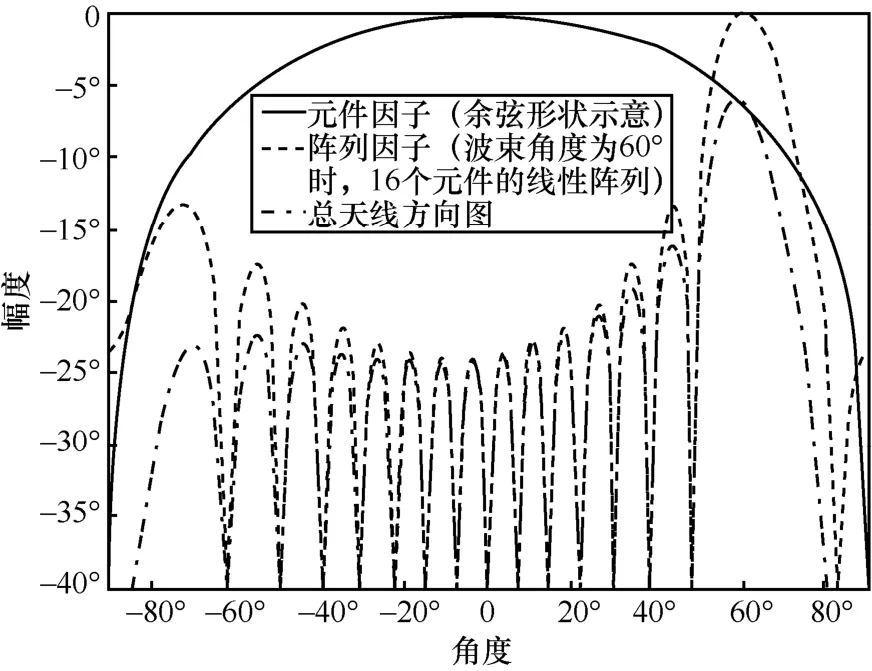
图2 阵列增益与单元增益组合形成的相控阵天线方向示意图

当已知不同可控角φ时对应的最大等效全向辐射功率(equivalent isotropically radiated power,EIRP)谱密度 EIRPmax(φ),可控波束的最大PFD计算式如下:

其中,BW通常定义为《无线电规则》第21.16条中限值对应的参考带宽,即为4 kHz或1 MHz。R(φ,ψ) =G(φ, 0)−G(φ,ψ)为离轴角ψ时相对最大增益的下降量,ψ=0时R(φ,ψ) =0,在半功率波束宽度处时,R(φ,ψ) =3dB 。
下面分析离轴角ψ的取值范围。不同可控角时到地PFD示意图如图3所示,地球站A处观察点水平面上到达角为θ。卫星可控波束指向地球站A时,此时可控角等于半视角,均为φ1,A处离轴角ψ1为0,观察点方向上天线增益为卫星最大发射功率谱密度为Pmax(φ1)。卫星可控波束指向地球站B时,可控角为φ2,地球站A处观察点离轴角为ψ2,观察点A方向上卫星天线增益为G(φ2,ψ2),卫星最大发射功率谱密度为Pmax(φ2)。
图3 不同可控角φ时到地PFD示意图
离轴角ψ2的大小由可控角φ1和φ2共同决定,且 |φ1−φ2|≤ψ2≤φ1+φ2。具体说明如下。
离轴角的取值范围示意图如图4所示,卫星星下点为O,可控角为1φ时,波束中心在地面点的集合为图4中小圆,此时指向A点。可控角为2φ时波束中心在地面点的集合为图4中大圆,此时指向B’点,A处观察点离轴角 2ψ的大小根据B’的位置变化而变化。三角形AOB’中,AO和B’O为固定长度,AB’长度取决于∠B’OA。当B’运动到B点时,AB’最小,对应离轴角ψ2=|φ2−φ1|;当B’运动到B”处时,AB’最大,对应离轴角ψ2=φ2+φ1。因此有 |φ1−φ2|≤ψ2≤φ1+φ2。
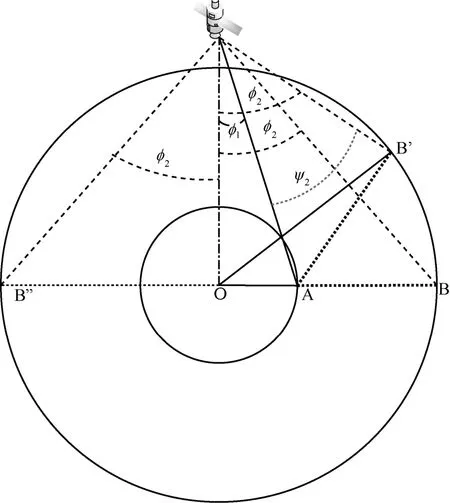
图4 离轴角的取值范围示意图
2 可控波束PFD限值符合性判定方法
通过式(3)或式(4)可计算特定可控波束到地PFD值。按照国际电信联盟规定,评判特定可控波束到地PFD值是否满足《无线电规则》第21.16条限值要求,除了分析评估该特定可控波束在覆盖范围内是否满足限值要求之外,还需要同时判断可控波束覆盖范围之外的PFD值是否满足限值要求。
2.1 特定可控角下可控波束PFD限值符合性判定算法
当卫星天线参数确定后,可控波束最大发射功率谱密度Pmax(φ)或最大 EIRP谱密度EIRPmax(φ)便可确定。可控角固定时到地PFD示意如图5所示,可控角为φ的可控波束指向观察点A,判断该可控波束是否满足PFD限值要求,应计算此可控波束对任意水平面上到达角θ产生的PFD均能满足限值要求,具体算法步骤如下。
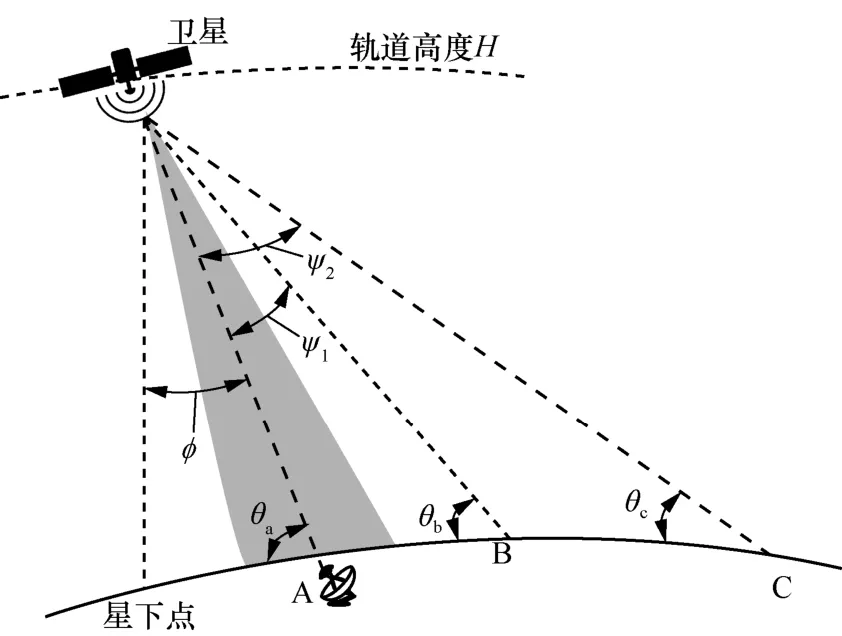
图5 可控角φ固定时到地PFD示意图
步骤1∀θ∈ (0,90],利用式(3)或式(4)计算到地PFD(θ)。
步骤2∀θ∈ (0,90],按照《无线电规则》第21.16条要求计算相应业务相应频段PFD限值PFDLimit(θ)。
步骤3如果∃θ∈ (0,90], PFD(θ)> PFDLimit(θ),则可控角为φ的可控波束不满足PFD限值的要求;如果∀θ∈ (0,90],均有 PFD(θ) ≤PFDLimit(θ),则可控角为φ的可控波束 EIRPmax(φ))满足限值要求。
可控角为φ的可控波束不满足PFD限值时,则应减小卫星的发射功率谱密度Pmax(φ)或EIRP谱密度 EIRPmax(φ),使其满足∀θ∈ (0,90],均有PFD(θ) ≤PFDLimit(θ)。将式(3)或式(4)代入,则∀θ∈ (0,90],

或

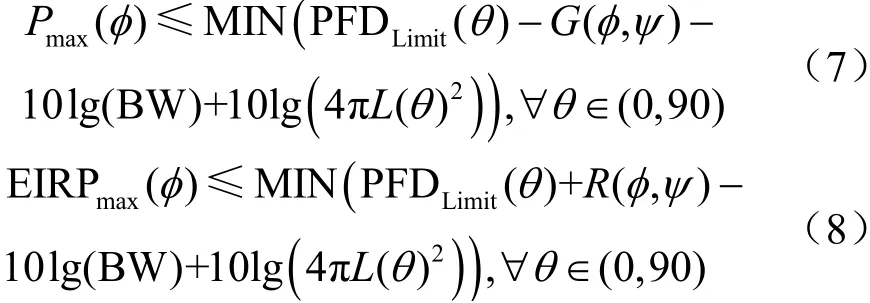
式(5)和式(6)变换后,在可控角为φ时的卫星最大发射功率谱密度Pmax(φ)或最大EIRP谱密度 EIRPmax(φ),可由式(7)、式(8)确定:
2.2 基于仰角遍历的可控波束PFD限值符合性判定算法
基于第3.1节给出的特定可控角下的可控波束PFD限值符合性判定方法,遍历可控波束的可控角φ取值范围,即可分析可控波束是否满足PFD限值要求。这种方法思路较为简单,但需要执行每个可控角下不同仰角PFD的符合性判定,运算复杂度高。本节将给出基于仰角遍历的可控波束PFD限值符合性判定方法,先在给定仰角下从所有的可控波束找到最大PFD,然后再与限值作比较,无须判定每个特定可控角的可控波束是否满足PFD限值要求。可控波束不同到地角最大PFD计算流程如图6所示,具体的算法步骤如下。
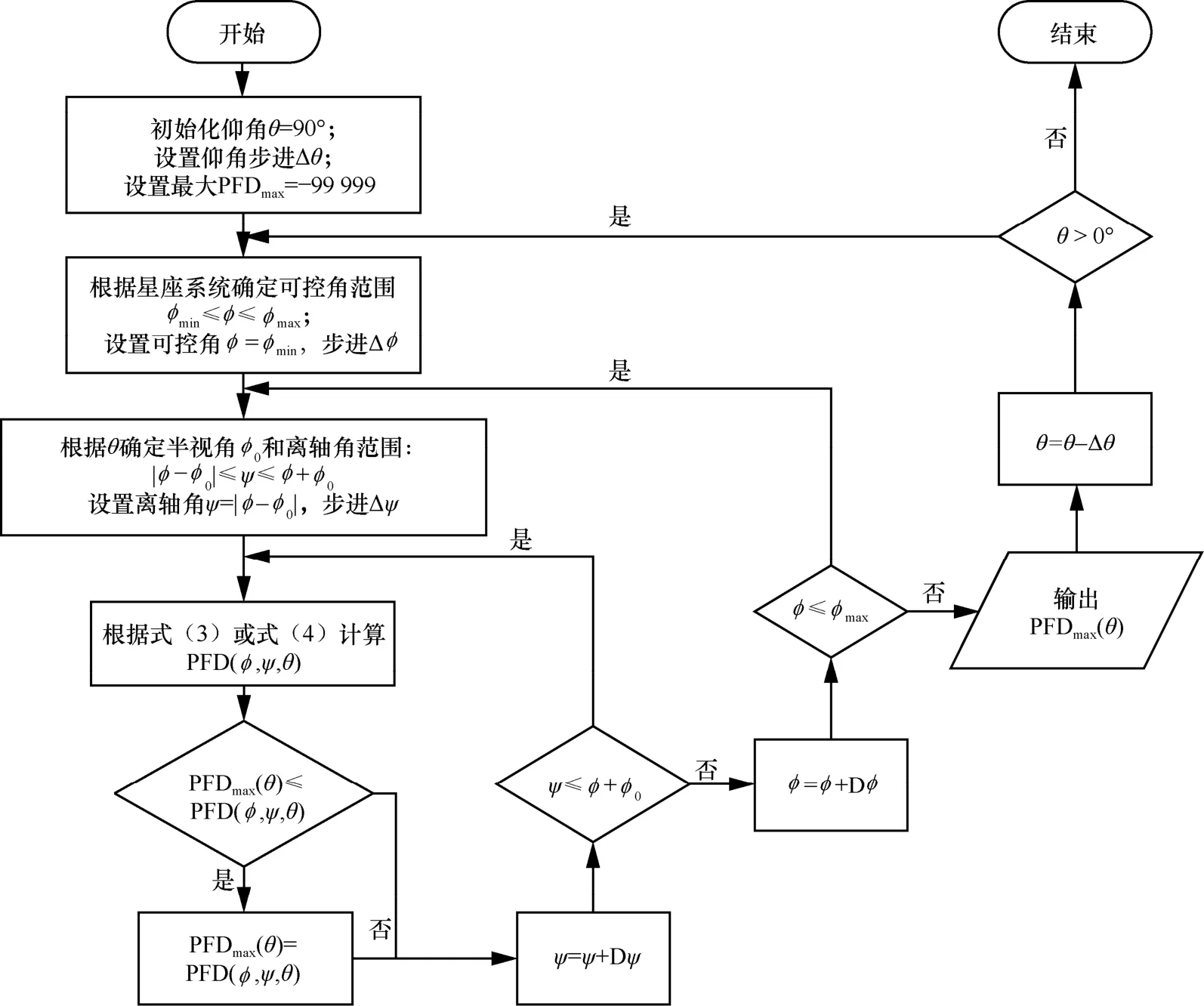
图6 可控波束不同到地角最大PFD计算流程
步骤1根据低轨星座系统信息获取不同可控角的功率谱密度Pmax(φ)或EIRP谱密度EIRPmax(φ)、天线方向图、最大增益和波束可控范围(根据系统最低通信仰角确定)等信息。
步骤2初始化仰角θ=90°,设置仰角遍历步进为 Δθ,初始化 PFDmax(θ)=−9 999。
步骤3初始化可控角φ=φmin,设置可控角遍历步进为 Δφ,根据仰角计算半视角φ0。
步骤4初始化离轴角ψ=|φ−φ0|,设置离轴角遍历步进为 Δψ。
步骤5利用式(3)或式(4)计算当前仰角、可控角和离轴角下的可控波束到地PFD(φ,ψ,θ)。
步骤6若 PFD (φ,ψ,θ) ≥ PFDmax(θ),则PFDmax(θ)=PFD(φ,ψ,θ),否则直接进入下一步。
步骤7离轴角ψ=ψ+ Δψ(不同离轴角对应指向不同但可控角相同的可控波束)。
步骤8若离轴角小于φ+φ0,重复步骤(5)至步骤(7),否则进入步骤(9)。
步骤9可控角φ=φ+ Δφ。
步骤10若可控角φ小于最大值φmax,重复步骤(4)至步骤(9),否则进入步骤(11)。
步骤11输出 PFDmax(θ),此时得到仰角为θ时可控波束到地的最大PFD。
步骤12仰角 =θθ−θΔ ;
步骤13若仰角θ大于0°,重复步骤(3)~步骤(12),否则结束。
通过以上步骤,便可确定低轨卫星可控波束在不同对地到达角θ的最大功率通量密度PFDmax(θ),与相应的限值 PFDLimit(θ)对比后,如果∃θ∈ (0,90], PFDmax(θ)>PFDLimit(θ),则该可控波束不满足PFD限值的要求;如果∀θ∈ (0,90],均有 PFDmax(θ) ≤PFDLimit(θ),则该可控波束满足限值要求。
2.3 低轨星座系统可控波束最大PFD简化算法
利用第3.2节的算法求解低轨星座系统可控波束在不同仰角最大PFD需进行离轴角、可控角和半视角三重遍历循环,运算量仍较大。低轨星座系统使用的频段较高,其可控波束通常为高增益窄波束,在主瓣外增益迅速下降。一般来讲,对某一观察点,可控波束直射(主瓣作用)产生的PFD比未直射(旁瓣作用)产生的PFD大。若此条件对任意观察点均成立,则只需要计算波束直射观察点的PFD便可得到该仰角的最大PFD。下面对两个可控波束直射观察点和未直射观察点产生的PFD进行比较分析。
可控波束覆盖范围示意图如图7所示,观察点A处半视角为φ,仰角为Aθ。可控波束指向A时,可控角等于半视角φ,利用式(4)计算该点PFD时,R(φ,ψ)=R(φ, 0)=0。此时PFD为:

可控波束指向B点时,可控角为1φ,到观察点A处的离轴角为 1ψ,PFD为:

这两个可控波束在A点产生的PFD的差值为:

其中, |φ1−φ|≤ψ1≤φ1+φ。若 ∀φ1∈ [φmin,φmax],均 有 ΔP FD ≥0,即 EIRPmax(φ1)−EIRPmax(φ)≤R(φ1,ψ1),则仰角为θA时对应的最大PFD产生于可控波束直接指向观察点A。因此,当观察点位于可控波束可覆盖范围内任意一点时,可控波束指向观察点产生的PFD等于可控波束在对应仰角(该观察点)产生的最大PFD需满足的条件为:

其中,φ为任意观察点处对应的半视角,φ1为任意可控角,ψ1为可控角为φ1的波束到观察点处的离轴角,|φ1−φ|≤ψ1≤φ1+φ,Δ E IRPmax(φ1→φ)=EIRPmax(φ1)−EIRPmax(φ),表示任意可控角φ1处的EIRP相对于可控角φ(也是半视角)时的EIRP的增量。
3 低轨星座系统可控波束到地PFD分析与验证
SpaceX公司在2020年5月向美国联邦通信委员会(Federal Communications Commission,FCC)提交了Starlink二代星座系统的申请[15],拟发射30 000颗低轨卫星,申请使用Ku/Ka/E频段,运行在328.3~614 km等8个不同轨道高度。用户波束和馈电波束均为可控波束,采用相控阵天线[16]。本节以Starlink二代星座系统为例,分析计算Starlink可控波束PFD并验证限值的规则符合性。
3.1 Starlink卫星可控波束特性分析
Starlink用户波束和馈电波束均为可控波束,如图7所示,地面加粗部分为可控波束覆盖范围,根据式(1)、式(2),可通过地面站最低通信仰角θ计算给定高度卫星的波束最大可控角φ。
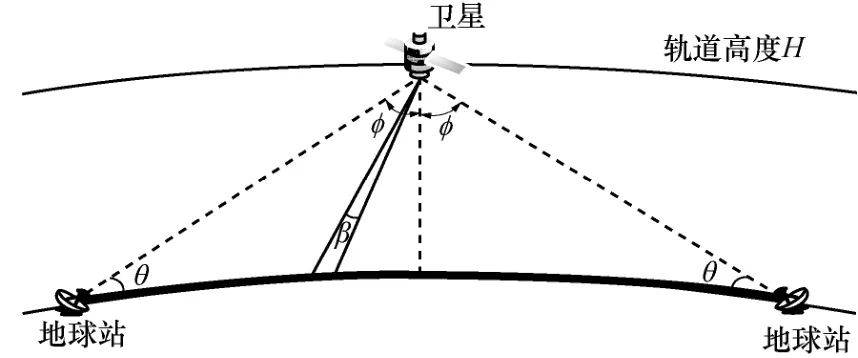
图7 可控波束覆盖范围示意图
对于360 km和373.2 km高度的卫星,位于高于纬度62°地区(极地地区)的信关站,Ka频段馈电波束(下行17.8~18.6 GHz/18.8~19.3 GHz)和E频段馈电波束(下行71~75 GHz)最低通信仰角为5°,纬度低于62°最低通信仰角为25°,其余轨道高度卫星馈电波束对应任何地区信关站最低通信仰角均为25°。不同轨道高度卫星馈电波束对应地球站最低通信仰角见表1。根据式(1)、式(2),360 km高度卫星不同最低仰角θ对应最大半视角φ和通信距离见表2。

表1 Starlink卫星馈电波束对应信关站最低通信仰角
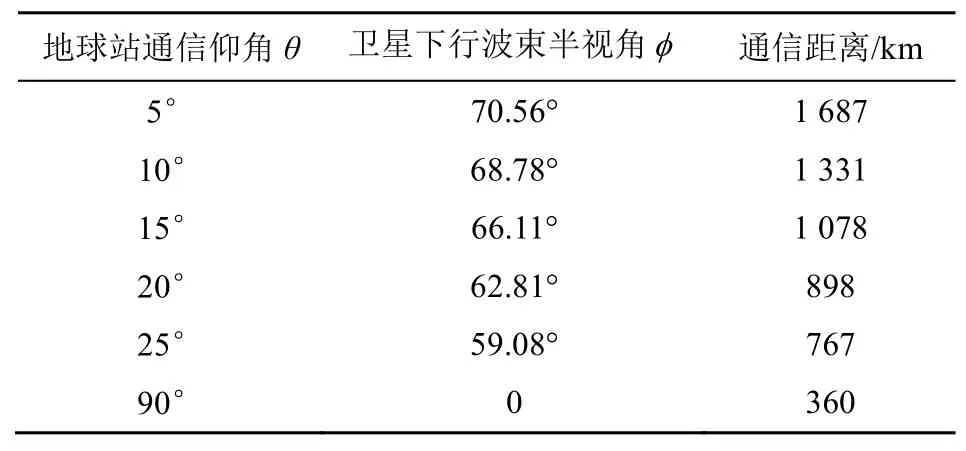
表2 360 km高度Ka/E频段地球站通信仰角对应半视角
Starlink星座系统通过功率控制,使得可控波束到地PFD恒定不变,在可控角度覆盖范围内相同增益的地面站接收载波功率相同。波束可以大范围转动,Starlink卫星下行发射功率需根据不同可控角进行调整,以补偿路径损耗和发射天线增益变化引入的衰减变化。从图8和图9可知,360 km高度处,Ka频段和E频段馈电链路Starlink卫星EIRP谱密度随可控角不断增大而逐渐增大。在可控角增至约70.56°时,EIRP谱密度骤降。这是因为此时地球站仰角约为5°,刚好低于最低通信仰角。
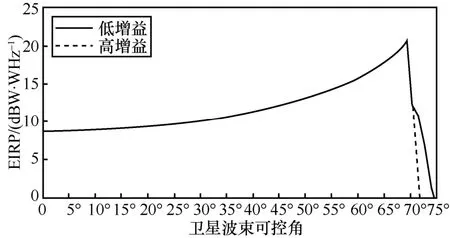
图8 不同可控角对应的EIRP谱密度(Ka频段)[13]
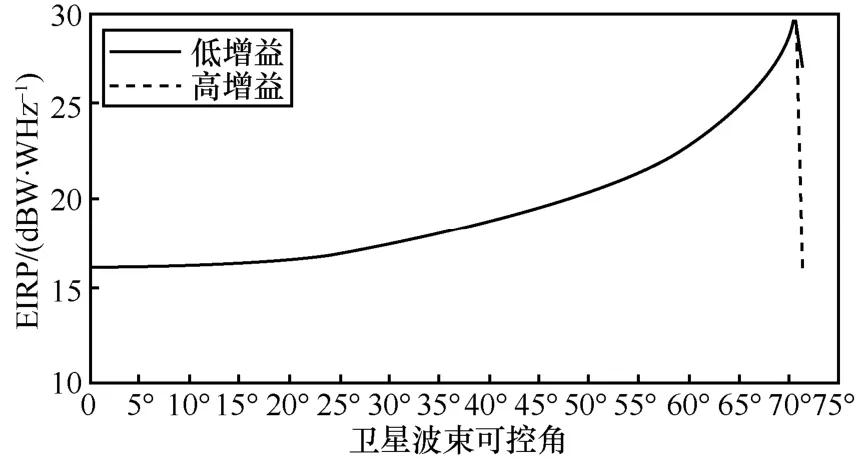
图9 不同可控角对应的EIRP谱密度(E频段)[13]
3.2 Starlink卫星可控波束最大PFD简化算法适用性分析
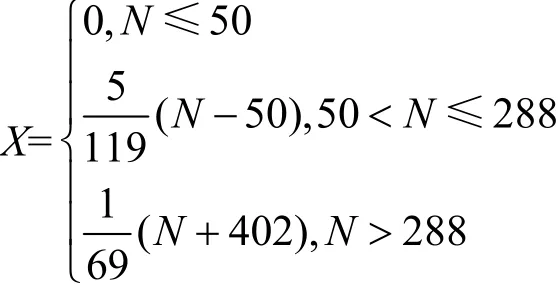
Starlink可控波束天线为高增益天线,360 km高度Ka频段卫星用户波束的天线最大增益为34.5 dB或44.5 dB,E频段卫星测控波束的天线最大增益为42 dB或52 dB。波束主瓣以外,天线增益迅速降低,R(φ,)ψ随离轴角ψ增大而迅速变大,半功率波束宽度小于2°,离轴角为1°时,R(φ,ψ) =3 dB ;离 轴 角 为 约 3.5°时,R(φ,ψ) =20 dB[17];离 轴 角 超 过 3.5°时,R(φ,ψ) >20 dB 。由图8和图9结合该波束相控阵天线离轴角ψ相对天线最大增益下降量R(φ1,ψ1)可知:
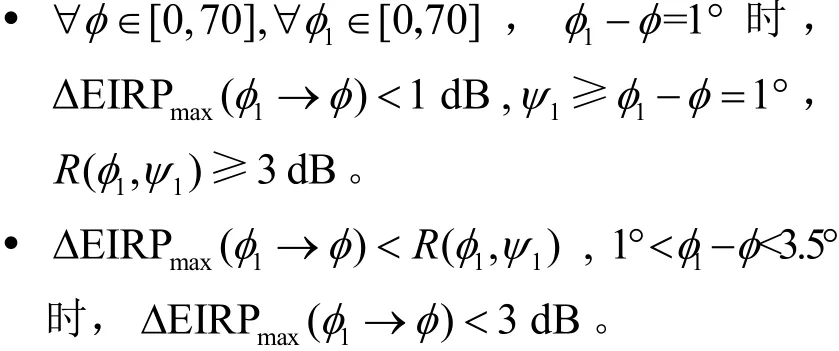
因此对任意观察点位于可控波束覆盖范围内,均能满足第3.3节中式(12)的要求。
由上述分析可知,针对Starlink星座系统的Ka/E频段的馈电波束,计算不同仰角下最大PFD只需要分析可控波束指向观察点时(可控角等于半视角)的情况,无须分析观察点处于可控波束覆盖范围外的情况。
3.3 计算结果与分析
依据第4.2节的结论,分析Starlink卫星可控波束的发射是否满足第21.16条PFD限值要求,只需要确定可控波束在不同水平面上到达角θ的最大功率通量密度 PFDmax(θ)和对应的限值 PFDLimit(θ)即可。
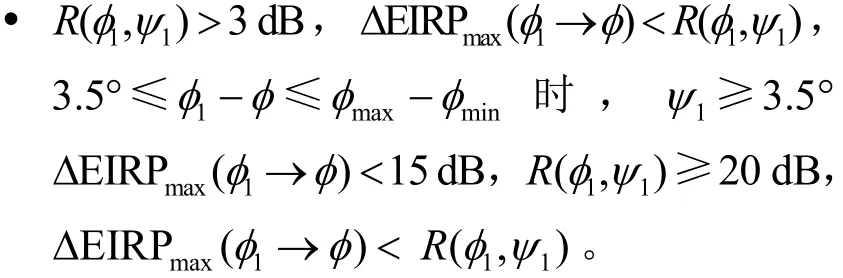
360km轨道高度处,Ka频段Starlink卫星发射EIRP谱密度见表3[13]。根据式(1)、式(2)和式(4),可计算不同对地到达角时的最大 PFDmax(θ),见表4。《无线电规则》第21.16条中17.7~19.3 GHz频段非静止轨道(non-geostationary satellite orbit,NGSO)星座系统PFD限值 PFDLimit(dBW/(m2⋅M Hz)−1)的计算见式(13),可知限值与NGSO星座系统规模有关。Starlink星座系统卫星颗数为30 000颗,因此N取30 000。
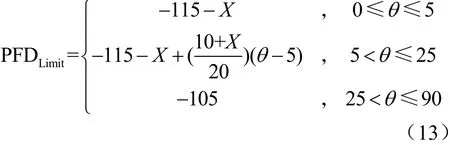
其中,
N为星座系统卫星数量。
360 km轨道高度处,E频段下行波束,根据表2可得到不同地球站仰角的半视角,通过相应半视角在图9查得相应的可控角对应EIRP谱密度的大约值,Ka频段与E频段EIRP谱密度见表3。利用式(4)计算得到最大PFD,与SpaceX核定值[14]均见表4。《无线电规则》第21.16条暂无E频段的PFD限值。
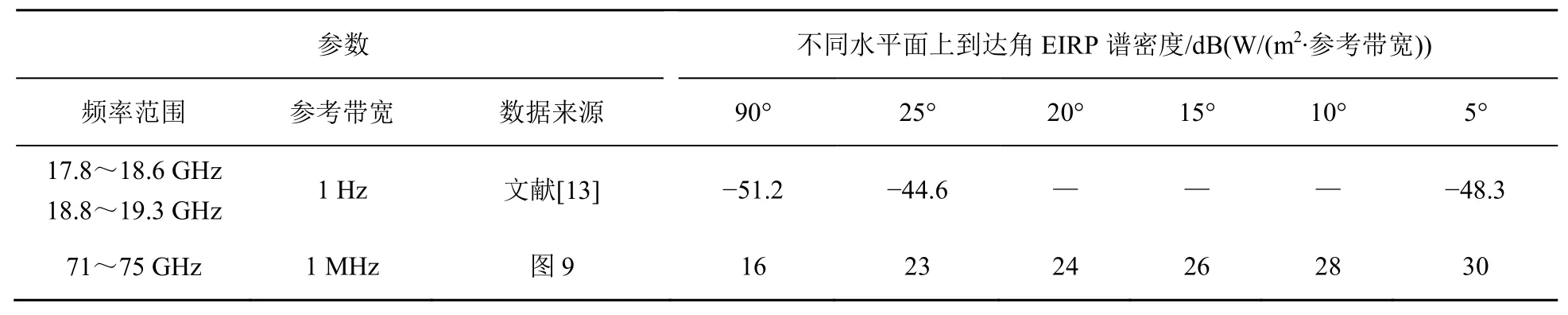
表3 Ka频段与E频段EIRP谱密度
根据表4可知如下内容。
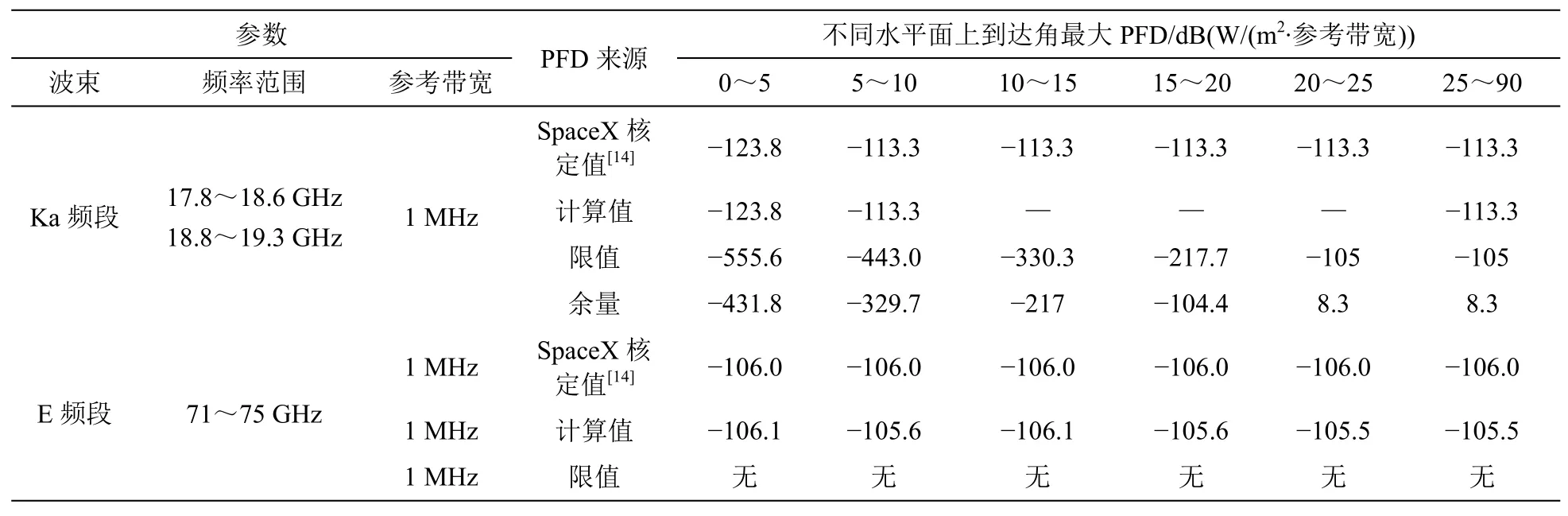
表4 360 km高度Ka/E频段馈电可控波束水平面上到达角最大PFD与限值
· 在不同对地到达角下,所提方法分析得到的Ka频段/E频段可控波束到地最大PFD的计算值与SpaceX公司申请材料提供的计算值是一致的。
· 水平面到达角在20°以下时,Starlink星座系统的Ka频段可控波束最大PFD远大于《无线电规则》第21.16条规定的PFD限值,不满足规则要求。
· 由于《无线电规则》第21.16条暂未规定E频段的PFD限值,无法判定Starlink星座系统的E频段测控波束是否会对固定业务系统/移动业务系统产生有害干扰。
对于不满足限值的情况,SpaceX公司作出如下说明[13]:星座系统卫星数量多达30 000颗,式(13)中N为30 000,导致17.7~19.3 GHz的PFD限值在5°以下水平面上到达角时为−555.6 dB(W/(m2·MHz)),远小于核定的最大PFD;用于Ka频段的PFD限值计算方法是在低轨星座系统卫星数量很少时的研究周期制定的。对大型星座系统,这种计算方法大大高估了对地面固定业务系统产生有害干扰的可能性,不适用于卫星数量大于840颗的动态控制波束的低轨星座系统[18];SpaceX公司申请豁免Ka频段(17.8~18.6 GHz/18.8~19.3 GHz)的PFD约束[16]。
4 结束语
为保护频率使用同等地位的固定业务和移动业务,ITU针对空间业务到地PFD提出了明确的限值要求。本文分析了低轨星座系统可控波束的PFD的计算方法,给出了特定可控角可控波束PFD限值符合性判定算法,基于此,提出了一种基于仰角遍历的可控波束PFD限值符合性判定算法并给出了相应的算法流程。结合低轨星座系统特征,给出了可控波束最大PFD简化算法。以Starlink星座系统可控波束为分析场景,计算分析了Ka/E频段馈电波束的PFD。分析结果表明,所提可控波束PFD算法与Starlink系统使用方法得到的分析结果一致,印证了所提算法的有效性。Ka频段馈电波束到地PFD在仰角低于20°时不满足限值要求,主要原因在于《无线电规则》第21.16条中PFD限值大小与低轨星座系统卫星规模正相关。由于暂无PFD限值约束,无法判定Starlink系统E频段馈电波束是否会对地面业务系统产生有害干扰。
