电站锅炉巡检无人机图像增强及智能识别技术
2022-05-06张坚群
张坚群
(浙江浙能乐清发电有限责任公司,浙江 温州 325609)
0 引言
目前,燃煤发电依旧是国内的主要电力来源,2021年燃煤电站发电量占全国总发电量约70%。在燃煤电站,锅炉是最主要的设备之一,是化石燃料转化为热能的场所。煤等化石燃料在锅炉炉膛内燃烧,产生热能,然后将热能转化为电能,所以锅炉的稳定运行至关重要。但是由于炉膛内燃烧温度特别高,烟气流速非常快,锅炉水冷壁等受热面经常出现大面积结焦和爆管事故,严重威胁到锅炉的安全运行。
加强锅炉的检修是保证锅炉安全运行的有效手段,目前主要有两种检修方式:一类是事故后的停炉检修,一类是日常定期检修。锅炉炉膛四周布满了金属水冷壁,是一个内部没有光源封闭的矩形空间,布满了灰尘和煤焦,且富含CO等有毒气体,环境非常恶劣,非常不利于检修[1-3]。目前无论是日常检修还是紧急事故检修,都需要在锅炉炉膛完全冷却后(环境温度),在炉膛内搭建人工脚手架,检修工人进入炉膛后,采用人工巡视对炉膛进行全面巡检。这种传统的人工锅炉检修方式,耗时耗力,消耗大量人力物力,经济效益较低,同时检修风险也比较高。
利用智能化设备提高检修效率,降低检修成本以及提高检修安全性,是建设智慧电厂的重要内容。随着无人机技术的进步和发展,被广泛应用于电力巡检等领域。无人机作为一个技术平台和工具,正被应用于各个领域[4,5]。在国外,德国Quenzel Jan等人开发了用于工业烟囱巡检的无人机导航系统[6],无人机采用多旋翼无人机,配备3D激光扫描仪以及立体声相机等多个传感器,多传感器之间相互融合工作。瑞士Michael Burr 和Janosch Nikolic 等人设计并开发了基于视觉火电厂锅炉炉膛检测的无人机,能够用于大型锅炉炉膛的检测[7]。国内对无人机在封闭空间的导航问题进行了大量研究,北京航空航天大学吴琦等人研究了封闭空间无卫星导航信号条件下小型无人机的导航问题[8]。燕山大学王梦石和华南理工大学姚土采用超带宽定位技术,(UWB)研究了无人机室内导航问题[9,10]。
本文在某600MW超临界机组炉膛内,采用UBW定位技术,进行了无人机炉膛巡视检修测试,结果表明利用无人机可以完成锅炉炉膛事故和日常巡检。通过无人机携带高清摄像机对炉膛进行全炉膛扫描,扫描图像可以实时传输至炉外,也可以用于计算机智能分析。测试结果表明,由于炉膛内光线昏暗,且多灰尘,所摄取的视频图像不能够直接用于人工巡检和智能巡检。本文研究了锅炉炉膛无人机视频预处理和智能识别技术,将无人机获得的视频经过光学校正、去噪、图像复原等预处理措施,然后用于人工巡检和智能巡检,取得较好的效果。
1 燃煤电站锅炉无人机巡视技术
燃煤电站锅炉巡检无人机飞控解决方案如图1,无人机采用四旋翼机翼无人机。主要包括了主控单元、无线通信模块、操控器、传感器、执行机构,以及三维路径规划和定位系统。主控单元是控制系统的核心模块,主要将采集到的飞行数据和控制指令,由高级控制算法实时计算后输出到执行机构,控制飞机的飞行姿态和路径。各种传感器用于采集飞机的姿态、速度和高度等数据,执行机构控制四旋翼机翼的转速和方向。无线通信模块是人工操控和自动飞行的通讯接口模块,无线通信模块由炉外端和炉内端构成,两端通过有线连接。炉外端通过无线连接着操控器和三维定位服务器,炉内端负责在炉内与无人机飞控通讯、数据交互以及视频信号采集等。操控器用于人工控制飞行,三维定位服务器以锅炉炉膛为对象,开发一个三维模型,将无人机飞行轨迹在三维模型上实时展示。在人工飞行模式下,由于无法目测无人机的飞行轨迹,参照实时三维模型上的飞行轨迹,可以解决炉外盲飞的问题。在自动飞行模式下,在三维模型上人工规划飞行路径,无人机将按照既定的轨迹自主飞行。同时三维定位服务器实时接收无人机的视频数据,将炉内的实时视频数据传输至服务器保存和处理。

图1 燃煤电站锅炉巡检无人机飞控解决方案Fig.1 Flight control solution of UAV for boiler inspection in coal-fired power station
图2为600MW超临界锅炉炉膛无人机巡检视频信号处理方案,主要包括了多传感器视频采集和信号传输,视频数据预处理,基于立体视觉的三维重建、超声波三维定位以及故障智能识别等。本文主要介绍视频预处理和基于神经网络的故障识别技术。
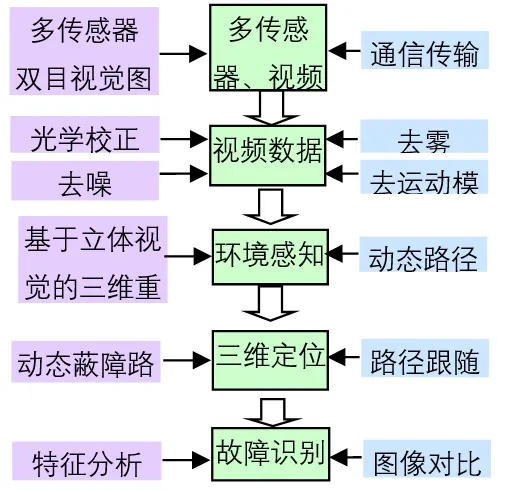
图2 600MW超临界锅炉炉膛无人机视频信号处理方案Fig.2 Video signal processing scheme of UAV in 600 MW supercritical boiler furnace
2 炉膛巡检无人机视频图像增强技术
2.1 锅炉受热面视频光学校正
电站锅炉炉膛环境恶劣,黑暗无光源。照明是炉内无人机飞行的主要困难之一,加装外部电源需周期长且能耗高,受限于无人机续航和电池容量,无人机自带照明照度有限。本文所研制的无人机采用自带照明技术,但受限于锅炉昏暗和多灰环境,视频图像亮度信息明显不足。无人机所拍摄的动态视频对于亮度有一定的需求,否则视频信号会失真,导致锅炉受热面的检查结果误差较大,使得巡检结果不客观、不理想且不准确。为了解决这一难题,采用基于伽马校正方法对视频进行补光处理,调整视频亮度图像,同时能够保持视频亮度等细节信息,防止在估计亮度图像的过程中丢失亮度信息。通过该方法有效解决了电站锅炉炉内光源缺乏的问题,改善视频图像对比度下降以及亮度不均衡的缺陷,有效解决了无人机锅炉内部巡视视频质量不佳的问题,具体校正方法如下:
为了达到亮度一致的目的,需要使屏幕色彩响应函数满足:

根据等式(1),得到优化的约束条件:

Hd′ (x,y)计算影响对比度寻优,为了能够在约束条件限制下获得亮度响应曲面,提出了一种基于贪心方法的动态优化算法。
贪心方法的基本原理是:优化问题是寻找问题的可行解,所谓可行解是满足一定约束条件的解。优化问题一般存在一个目标函数,此目标函数能够综合评价优化问题,优化问题转化为获得目标函数的可行解。它把优化问题求解过程分成若干个子过程,使得每一个子过程的目标函数极大(或极小),判断是否是可行解,如果是则继续进行下一阶段的求解,否则寻找目标函数次优解作为可行解。
为了目标亮度问题寻优,计算响应曲面函数Hd′ (x,y),给出目标函数:

测量得到的亮度响应曲面Hd(x,y)和目标亮度响应曲面Hd′ (x,y) 的均方差,通过贪心方法求使目标函数最大的可行解。
此算法也是一种滤波算法,算法的输出是一阶连续的,所以亮度统一的结果也是变化平滑的。图3是运用该算法得到的对比图。

图3 无人机巡检的图像光学校正Fig.3 Image optical correction of UAV patrol inspection
2.2 炉膛受热面的无人机图像去噪
电站锅炉炉膛多灰,无人机的飞行气流使得空气中的灰尘浓度升高,给无人机的视频采集带来困难,影响了视频的清晰度。灰尘的大量存在,使得采集的视频序列增加了严重的噪声,这些噪声的存在使得视频质量严重下降,影响对锅炉受热面的检测质量。因此,视频图像序列去噪声是本文研究的另一项重点内容。
维纳(Wiener)滤波器是一种自适应滤波器,为了适应信号噪声未知的或随时间变换的统计特性,利用潜意识可以获得的滤波器参数等结果,自动调节现时刻的滤波器参数。具体的,自适应滤波器根据图像的局部方差调整滤波器的输出,目标是使恢复图像g(x,y)与原始图像f(x,y)的均方差最小。
维纳(Wiener)滤波器首先估计出像素的局部矩阵均值和方差:
对每一个像素利用Wiener滤波器估计出其像素值:

式(5)中,v2为噪声的方差。
综上所述,维纳滤波去噪方法以滤波器的输出根据图像局部方差来调整。相对于线性滤波器,维纳滤波器选择性更好,图像的边缘和高频细节等信息可以得到更好地保留和加强。在滤波处理过程中,当图像局部方差偏大时,滤波平滑效果较弱,反之滤波平滑效果较强。本文研究表明,通过本维纳滤波去噪算法,有效提高算法计算速度和鲁棒性,具有较好的去噪效果。
图4是通过使用维纳滤波器去噪算法进行处理的对比图像。
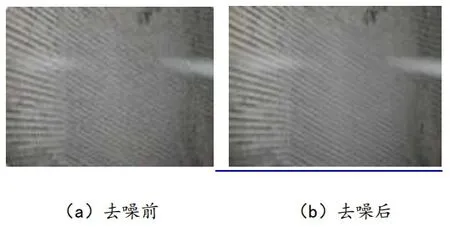
图4 无人机巡检的图像去噪Fig.4 Image denoising of UAV patrol inspection
2.3 无人机运动模糊图像复原
摄像机在获取景物时,如果在相机的曝光时间内景物与相机之间有相对运动,则得到的图像往往会比较模糊,这类退化图像被称为运动模糊图像。一般有两种途径可以减少由于模糊而引起的图像退化。一种是减少相机的曝光时间,这样可以在一帧图像的积分时间内减少运动模糊距离,也就减小了一个像素点的能量在多个像素点上的平均。但曝光时间不能无限地减小,曝光时间太短会导致每个像素上积累的能量太少,则获得图像的亮度太低而使图像质量严重下降。另一种途径是建立图像运动模糊的数学模型,利用图像处理技术将退化图像进行复原,达到消除图像运动模糊的目的。这种方法与具体的硬件设备无关,具有普遍性,因而受到了广泛的关注。
运动模糊图像的恢复是图像复原的主要分支之一,由于大多数图象恢复问题都不具有唯一解,或者说恢复具有病态特征。为了克服这一问题,通常需要在恢复过程中对运算施加某种约束。
设对图施加某一线性运算Q,求在约束条件:

利用拉格朗日乘数法,构造辅助函数:

实际飞行结果表明,在4个方向中均出现运动模糊,其中前向运动模糊是最主要的。研究表明,飞行姿态变化对模糊尺度具有一定的影响,与前向运动模糊还是主要的,两者相差一个数量级,因此飞行姿态变化对模糊的影响可忽略不计。前向运动模糊的补偿一般有电子式、光学式和机械式等补偿方法,利用这些补偿方法能有效消除无人机相对运动视频质量的影响,有效恢复图像质量。除了前向运动模糊,大气湍流、机翼随机旋转和振动等造成的运动模糊,对视频质量也有一定的影响。对于该运动模糊,通过式(6)的运动补偿算法,对图像复原算法进行改进,开发了实时性和鲁棒性都较强的去模糊算法。通过无人机在炉膛内实际应用表明,采用该去模糊算法效果良好。图5是通过使用该去模糊图像复原算法处理的对比图像。
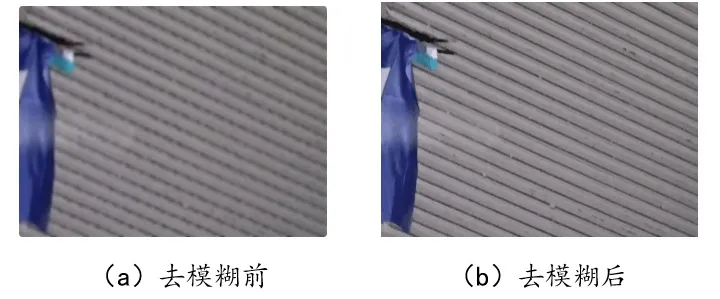
图5 无人机巡检的图像去模糊Fig.5 Image deblurring of UAV patrol inspection
3 受热面故障缺陷智能识别检测
深度信念神经网络被广泛用于智能巡检等领域,为了确保神经网络能够按照最大概率生成训练数据,需要对神经网络进行训练,目标是通过学习算法获得一组最优的权值。深度信念网络属于神经网络范畴,但其包含了多隐层网络模型。多隐层网络模型权值训练具有一定的难度,由于隐层太多,若直接使用梯度下降法,容易使网络陷入局部最小。同时,随着网络隐层数目的增加,网络梯度幅度急剧减小,深度也相应增加,造成神经网络权重调节非常缓慢。在网络训练过程中,初始权值是决定网络训练质量的一个主要因素,对训练结果和学习算法鲁棒性影响较大。本文采用Hinton提出的一种非监督的贪心逐层训练算法对深度信念神经网络的权值进行预处理,可以得到一组相对比较最优的权值,解决了相关的深层网络结构优化难题。

式(8)中:aj是RBM2层第j个神经元的基;W就是RBM网络的链接权值。
对于被训练的每一个样本s,将其赋值给可见层进行训练RBM,充分训练RBM1后,固定RBM1权值,使用式(8)得到RBM2的输入向量,然后训练RBM2。以此类推,完成整个神经网络的权值预处理。
采用式(8)预训练完后,将输出层神经元的激励函数设置为sigmoid函数,获得了深度信念网络的较优权值。训练结束后,训练样本的输入和输出可以作为神经网络初始输入和输出,其中权值大小的调节需要根据神经网络的输出和训练样本中对应输出之间的差值反向调节,采用梯度下降法对预训练权值进行调节,最终得到比较优的权值。从输出层和各个隐层之间的权值逐步调节开始,相应权值全部满足精度后,整个网络的结构和权值全部确定。测试样本的100组数据进行测试,拟合的效果如图6,模型输出和期望值偏差如图7。
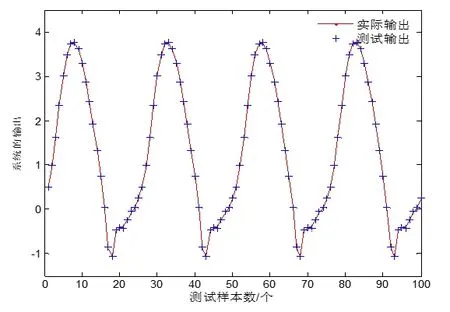
图6 模型测试输出和实际输出Fig.6 Model test output and actual output
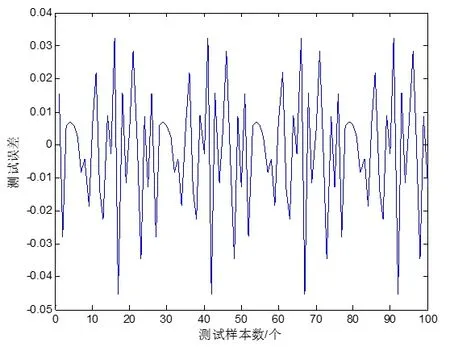
图7 模型测试输出和实际输出误差Fig.7 Actual error between model test output and actual output
在实际应用过程中,利用该深度信念神经网络算法,对炉膛内结焦状况进行智能识别,成功的发现了燃烧器的结焦情况,如图8所示。
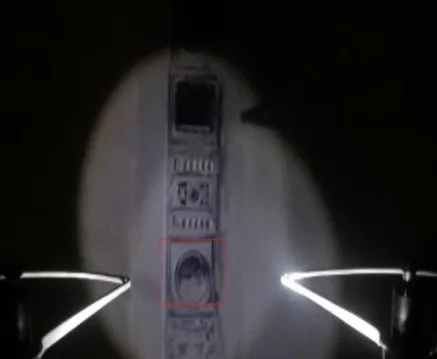
图8 智能检测燃烧器结焦识别Fig.8 Intelligent detection and burner coking identification
4 结论
由于锅炉炉膛无光源,含有大量的煤灰。利用无人机所获取的受热面视频图像,不能直接用于人工检测和智能诊断。论文研究了锅炉受热面无人机视频光学校正、信号去噪以及去模糊技术。将所获取的受热面视频图像经过预处理后,采用基于神经网络的智能检测技术,对例如炉膛结焦等受热面故障进行智能分析,取得了较好的效果。
本文研究结果表明,利用无人机开展炉膛巡视和检修是可行的,可以节约大量检修成本,提高检修效率,降低检修风险,为燃煤电站的智能化和智慧化技术发展提供了思路。
