无人机低空摄影测量在大比例尺测图及精细化建模领域的适用性分析
2022-05-05杨少愚刘清田张力祥
杨少愚 刘清田 张力祥
(自然资源部第三地形测量队,黑龙江 哈尔滨 150025)
0.引言
随着社会的发展,以物联网、大数据、人工智能等新技术为代表的数字浪潮席卷全球,在传统测绘领域,用全站仪、RTK测量地物特征点,然后内业勾勒特征点成图的方法虽然可以取得不错的测量效果,但是由于二维的成果信息承载比较单一,已经不能满足当下社会的发展需求,在自然灾害、公共安全、城市信息更新等领域中,迫切需要发展“空—天—地”一体化的观测体系。应用无人机航空摄影测量技术获取目标区域现势性信息,可以更加真实直观地反映地物现状,从而更加高效地开展防灾减灾、城市更新、智慧城市建设等工作[1]。无人机低空航测具有机动灵活、高效快速、精细准确、作业成本低、适用范围广、生产周期短等特点[2],特别是在地形复杂、交通困难的地区,利用无人机进行的高分辨率影像快速获取具有明显优势,无人机低空数字航空摄影测量得到了越来越多的推广应用,逐渐成为传统航空摄影测量的有力补充。本文通过应用大疆精灵4 RTK无人机倾斜摄影方式对某厂区进行三维立体建模并矢量化采集生成的地形图成果数据精度进行比对分析,检测航测成果精度,并针对无人机在大比例尺测图及精细化建模领域的适用性进行探讨。
1.无人机摄影测量技术流程
无人机摄影测量作为一门新型技术,被广泛应用在三维建模领域当中,从而进行多种多样的工程测量。本次测试区域使用的无人机型号为大疆精灵4 RTK,通过无人机摄影测量技术对占地面积为0.33km2的某厂区进行正射和倾斜摄影两种方式分别采集,在飞行前第一时间进行了空域申请并向当地派出所备案。本次测量的坐标系统采用CGCS2000国家坐标系;高程基准采用1985国家高程基准;投影方法采用高斯-克吕格投影3度带,中央子午线为117°E,成图比例尺为1∶1000,地形图成果等高距间距为0.5米。主要工作流程(如图1所示):
1.1 参考规范
本次测试参考《GB50026-2007工程测量规范》《GBT 33176-2016国家基本比例尺地图1∶500 1∶1000 1∶2000地形图》《CHZ3003-2010低空数字航空摄影测量内业规范》《CHZ3005-2010低空数字航空摄影规范》《GBT 24356-2009测绘成果质量检查与验收》《GBT 18316-2008数字测绘成果质量检查与验收》这些规范作为操作依据及精度检验标准。
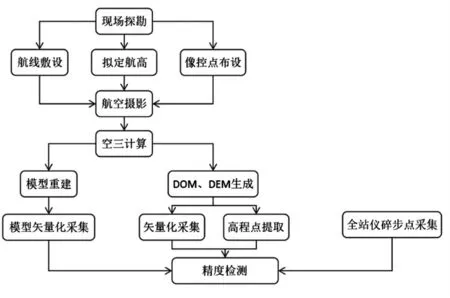
图1 工作流程
1.2 航线规划
航线规划主要涉及三个方面:测区范围、航高确定和重叠度设置。
首先需要了解测区的环境、平均海拔、地形高差,根据实地具体情况拟定分区和架次并进行航带敷设。无人机航摄时航高与地面分辨率息息相关,通常我们根据下式计算相对航高:H=f×GSD/a(H为相对航高、f为摄影镜头的焦距、GSD为影像的地面分辨率、a为像元尺寸的大小)。通过对航高的控制调整GSD的精度,从而得到不同精度的成果,并在此基础上,确定理论航线相对航高。在设计航高时,必须考虑测区内整体落差情况。当测区地形落差较大时,会导致单张照片覆盖的范围变小,进而导致与相邻照片的重叠率变小。在架构航线时,必须保证航向超出测区边界不能少于一条基线,航向重叠度一般为60%~80%,最小不低于53%;旁向重叠度15%~60%,最小不低于8%。当影像重叠度无法满足规范要求时,就会导致空三失败或出现影像拉花、空洞等问题。此类情况常见于高山地区或城区中高低建筑彼此交错的区域,此时应通过航带分区或适当降低飞行高度的方式避免此类问题。在实际作业中可通过牺牲部分成果精度以提高飞行高度,减少飞行架次,从而增加作业效率;也可以牺牲部分效率以增加相 片重叠度,从而增加相片纹理及特征点以提高模型精度。
1.3 像控点布设
为了更好地获取高精度的影像数据,布设像控地面标志点是极其重要的一环。像控点的精度和数量直接影响到航测数据后处理的精度,所以像控点的布设和选择应当规范、严格、精确。布设像控点之前要做好准备工作,首先要查看航测区域的地质地貌条件,通常情况下应选取硬质地面且空旷区域,周围无遮挡;像控点颜色要与周边地物存在一定色差(建议红色、白色、黑色),易于后期影像判读;像控点设立一般采用喷漆和标靶两种方式,大小需根据航高进行相应调整,保证标志点内角可在航片上清晰判读。像控点布设时尽量均匀布设,在1∶1000比例尺地形图中每平方公里控制点的平均布设点数为4~5个即可,当测区面积较小时以控制主体构筑物为主。
1.4 内方位元素获取
影像的内方位元素是描述摄影中心与相片之间相关位置(姿态)的参数,是摄影测量中的重要参数。在摄影测量中,需确定摄影机物镜后节点相对于相片面的三个参数,包括相片的垂距(主距)f(即物镜后节点到像主点的距离)以及像主点o在相片框标坐标系中的x、y坐标值,一般可通过航摄仪的鉴定获得。无人机出厂前都会经过严格的工艺校正,测算出相机的光学畸变差,每张相片属性中都会记录相机的内方位元素参数,用于用户后期处理。相机的出厂参数(如表1所示):

表1 相机参数
1.5 外方位元素获取
影像的外方位元素即通常所说的影像POS数据,由机载高精度GNSS设备和惯性导航系统(IMU)设备获取。大疆精灵4RTK无人机本身使用内嵌的千寻网络(目前千寻基站已经覆盖了我国80%以上的地区),通过GNSS双频载波(L1、L2波长分别为19cm和24cm)相位的实时差分定位技术,使无人机的POS参数精度达到厘米级精度。机载云台记录相机姿态数据(侧滚角、俯仰角和偏航角),经IMU和GNSS数据联合处理,可直接获得测图所需的每张相片的6个外方位元素,即曝光瞬间摄影中心在所选定的地面空间坐标系中的x、y、z坐标值(3个线元素)和曝光瞬间像片在所选定的地面空间坐标系中的姿态(3个角元素),就能够实现影像高精度定位与定姿。
1.6 DOM制作
通过外业航摄、像控点控制测量获取的原始数据,包括影像数据、POS数据、相机文件参数等,结合控制点数据,利用Pix4DMapper软件进行初步处理,迅速获取快拼图及质量报告,初步检查相片的重叠度和照片质量,当照片质量不合格或重叠度不足时,及时进行补飞。一般来说,保证测区像点网的构网强度,第一个原则是要确保测区范围内每一张相片的上、中、下三个区域内必须有连接点;第二个原则是要保证航线之间的连接强度,这意味着在每一张影像中,位于航线间重叠区域里的像点必须向相邻的航线转刺[4]。当相片质量满足要求时,选取测区范围内合理分布的控制点利用空三射线编辑器进行人工刺点,最终生成DSM和DOM成果数据。
2.精细化建模及模型矢量化
本次试验以满足1∶1000比例尺地形图成果要求精度为目的进行测试。参考《CHZ3005-2010低空数字航空摄影规范》进行航摄设计,拟定将本次航行地面分辨率控制在8cm。通过公式H=GSD×F/a求得理论飞行高度291.84m。根据试验区进行航飞后得到参数(如表2所示):

表2 相关参数
为了更好地验证本次试验的适用性,对此次飞行成果分别以DOM采集及模型矢量化两种方式进行处理,并分别对这两种方法的作业效率、优缺点进行比对分析。
2.1 DOM矢量化采集
使用Pix4DMapper软件将摄影测量中获取的数据信息进行空三计算、点云加密及正射影像生成等步骤。对原始影像进行重采样,生成DOM和DSM成果。将生成的DOM成果作为工作底图,通过人工解译对该区域构筑物的特征点进行矢量化采集,生成矢量数据;利用ARCGIS软件对DSM进行批量地面高程点提取、抽稀及整饰后,得到高程数据。将矢量数据与高程数据进行叠加后,得到1∶1000地形图最终成果数据。(如图2所示):

图2 DOM下采集的地形要素
2.2 三维模型矢量化采集
经试验发现,对于大比例尺地形图的采集仅通过DOM矢量化的技术手段精度无法满足规范要求,因为房檐及房屋主体的遮挡,很多时候通过正射影像并不能准确地采集房屋的外轮廓,所以一定要有三维模型和点云数据作为参考。无人机能够获取全方位、多角度的立体影像信息,承载更加丰富的数据信息,且无人机低空摄影测量技术也可较好地消除正射影像DOM的倾斜遮挡情况。将通过倾斜摄影测量的方式获取的数据信息利用ContextCapture软件进行空三计算、模型重建,生成三维实景模型并利用CASS3D插件将三维实景模型与CASS进行联动,在模型上进行裸眼立体采集获得矢量数据及高程信息,直接得到1∶1000地形图成果数据(如图3所示):

图3 三维模型下采集的地形数据
3.精度检测
本次针对模型矢量化成果进行精度检测,模型矢量化精度即为倾斜摄影数据的测量值与真值之间的差值。检测方法是利用传统网络RTK技术配合全站仪实测检校点,通过比对检测坐标点与成果坐标点的差值,检测平面及高程精度。传统测量方法在测量前通过已知点检测校准,且技术发展已经非常成熟,测量结果置信度很高,姑且视为真值。
(1)检查点的平面中误差按式(1)计算:

式中,Mx为坐标X的中误差;My为坐标Y的中误差;Ms为点位中误差;Xi为坐标X的检测值;Yi为坐标Y的检测值;xi为模型点位X坐标值;yi为模型点位Y坐标值;n为平面检测点个数。
(2)检查点的高程中误差按式(2)计算:

式中,Mh为高程中误差;Hi为RTK实测高程;hi为模型点位高程;n为高程检测点个数。
经过检测比较(如表3所示)后,根据中误差计算公式求得本次测试结果平面点点位中误差为±0.275m,小于成果允许中误差±0.5m;高程点点位中误差为±0.1m,小于成果允许中误差±0.15m。由此可知:此种方法得到的成果精度可以满足规范要求。

表3 精度检测统计
4.研究和分析
通过成果与检测数据对比,结合从数据采集到内业处理各阶段的分析,总结出无人机摄影测量中几个影响精度误差的主要来源:
(1)像控点布设时尺寸过小,后期像控刺点时出现较大误差,导致正射影像精度不足。正常情况下,以布设“L”型像控点标志为例,像控点标志单边长度应不低于航摄影像地面分辨率的7倍长;
(2)合理布设像控点可以使成果精度得到明显地提升,但当像控点的数量达到一定程度后,增加平面控制对平面精度的影响不大。所以应根据具体情况,按照合适的间距布设像控点[3];
(3)飞行方向尽量选择与测区内房屋纹理较多的一面相垂直,可有效减少房屋拉花的现象;
(4)在模型构建中,被树木遮挡部分或房屋间距太小导致模型构建不完善以及露台或凸出的阳台下方等倾斜影像无法获取的地方,是软件通过算法将周围物体拟合而成的。直接采集会存在较大误差,需要对其做借边或做辅助线的操作来保证精度要求,必要时需进行外业补测。
5.结束语
综上所述,采用大疆精灵4 RTK无人机摄影测量技术与CASS3D结合的三维测图方式在大部分情况下都具有可行性,与传统测量相比,其优势在于减少外业工作量和生产成本,将工作重心转移到内业,可减少工作周期。其在效率、精度、成本和工期等方面都有着明显的优势,充分体现了无人机倾斜摄影测绘成本低、效率高、精度准、成果直观等优势,为大比例尺地形图测绘提供了一个新的解决方案[5]。但这也带来了海量的数据,如何将信息处理的总体速度加快,不让其过多地消耗电脑配置,发挥其更高层次的工程测量价值,也成为我们今后要克服的难题。