旋转式天空偏振光的航向角检测系统
2022-04-29康健马伟李沅
康健, 马伟, 李沅
(中北大学信息与通信工程学院, 太原 030051)
太阳光是一种横电磁波,它的振动方向和传播方向互相垂直,它在射入地球大气层之后会受到大气层中所含有的空气分子、水滴、气溶胶粒子等大气成分的散射以及地面、水面等的反射形成了部分偏振状态的偏振光,这些部分偏振光形成的偏振状态分布模式为大气偏振模式,受太阳位置、大气成分分布等因素影响。这一特性可以作为导航的参考依据,为利用偏振光进行导航提供了仿生学基础。
目前中国许多高校和科研院所都设计出了偏振光探测器并且获得了不错的精度。文献[1]通过研究并模仿沙蚁复眼的POL(polarization-sensitive)神经元对大气偏振信息的探测机理,将两组偏振光检测单元搭载在二维旋转电机上以实现部分天空区域和全天域的大气偏振模式信息的快速有效的检测。文献[2-4]研究组推导了三维空间中应用偏振光测姿原理,结合大气偏振光与运动环境光流信息,同时引入了重力观测量,设计了基于重力辅助定姿的偏振光、GPS(global position system)和SINS(strapdown inertial navigation system)组合导航的算法。文献[5-7]研究组提出了一种基于偏振光传感器和红外传感器并且辅助惯性导航的组合导航方法,通过卡尔曼滤波进行信息融合,极大地提高了惯性导航的精度,目前褚金奎教授带领的团队研制的偏振光传感器在室内进行测量试验精度可达到0.1°,室外试验精度小于2°,这一试验结果证实了大气偏振模式图应用于导航的可行性,为高分辨率偏振遥感技术提供了技术依据。文献[8-10]为了获得较高的偏振光信息测量精度,采用相机成像方式将偏振片搭载在连续旋转电机上,电机带动偏振片进行旋转进而获得各个方向上的偏振模式信息,提高系统的抗干扰能力,极大提高了偏振光探测器的探测可靠性。
现采用旋转检偏的方式设计单通道偏振光探测器,相较于多通道点源式检测方法,可降低成本和体积,减小装配对准难度。
1 天空偏振模式的检测方法
太阳光在射入大气层之后受到各种大气成分的散射等影响后主要形成的是部分偏振光,所以斯托克斯矢量(Stokes)是大气偏振探测领域最常用的测量方法[11],可表示为
S=[I,Q,U,V]T
(1)
式(1)中:I表示总光强;Q、U分别表示0°~90°和45°~135°线偏振光分量之差;V表示圆偏振光光强。在自然环境中,偏振光的V分量很微弱,通常忽略不计。
偏振度d可表示为
(2)
入射偏振光电场强度E矢量方向与探测器参考正方的夹角θ可表示为
(3)
则入射偏振光的光强度Iin与Stokes矢量之间的关系可表示为
(4)
2 旋转式天空偏振光探测系统设计
2.1 系统的工作方式
基于光电模型的偏振光检测方法又叫作“点源式”检测方法,传感器的偏振光检测部分由蓝光滤光片、偏振片和光电二极管组成一个偏振光检测单元,一个偏振光检测单元的输出信号经放大电路放大后经A/D转换器成为可由MCU(micro control unit)接收的信号。其结构图如图1所示。

图1 基于光电模型的偏振光检测方式Fig.1 Polarized light detection method based on photoelectric model
基于光电模型的偏振光检测单元的一个偏振光检测通道输出的测量值V可表示为
(5)
将单个偏振光探测通道放置在旋转电机上并且保持水平,电机承载着偏振光探测通道以一固定的速度v1匀速旋转,偏振光探测通道输出的信号经放大电路由AD转换芯片传送给MCU进行信号处理和解算进而得到当前的航向角信息[12]。
设A/D转换器的采集速度一定,为v2,系统开机采集到的前三个电压数据V1、V2、V3的工作过程如图2所示。表达式为

图2 偏振信息采集过程Fig.2 Polarization information acquisition process
(6)
式(6)中:θ1表示偏振片方向与入射偏振光电场强度E矢量方向的夹角;Δθ1、Δθ2分别为采集到V2、V3测量值时电机所转过的角度。
三式联立即可解出θ1为
(7)
(8)
当系统采集到V1、V2、V3后,电机每转过一定角度Δθ,系统都能解算出一个θ1,如图3所示。
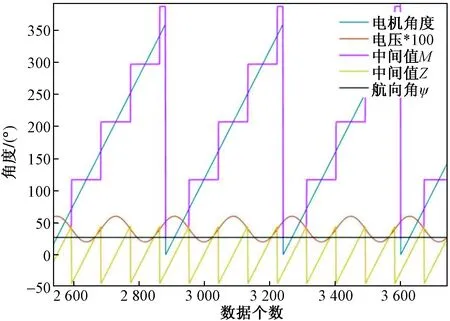
图3 系统解算过程Fig.3 System solution process
通过GPS授时可得到当前太阳子午线方向,进而可以得出当前的航向角ψ,航向角ψ与太阳子午线、设备体轴和正北方向的位置关系如图4所示。

图4 航向角与太阳子午线等的位置关系[13]Fig.4 The position relationship between heading angle and solar meridian[13]
2.2 系统的结构设计
为了减少其他颜色杂光对实验结果的干扰在硅光二极管上方加盖蓝光滤光片。为了增加入射光的强度使探测装置在弱光环境下也能得到幅值较大的输出信号,在硅光电池上方加盖焦距为1 cm的平凸镜使入射平行光汇聚在光电传感器的一点上。连续旋转检偏器的结构图如图5所示,实验装置如图6所示。

图5 连续旋转检偏器的结构图Fig.5 Structure diagram of continuous rotating polarizer

图6 连续旋转检偏器实验装置Fig.6 Experimental device of continuous rotating polarizer
2.3 系统的软件设计
偏振光探测系统的软件设计部分主要是由主控MCU控制偏振光传感器和GPS传感器两部分运行的过程,如图7所示。

图7 偏振光探测系统的软件结构流程图Fig.7 Software structure flow chart of polarized light detection system
具体的软件运行流程如下。
(1)系统上电开机后由控制MUC发送采集指令,两个传感器同时开始采集。
(2)控制MUC发送查询指令,提取两传感器的相关参数进行航向角解算。
(3)一次航向角解算完成后,控制MUC将数据存储在内部存储器中并同时在显示屏上绘制出航向角变化曲线。
3 实验与结果
携带装置到户外进行试验,实验地点为中北大学北环足球场,实验引入惯性导航传感器INS(inertial navigation system)的数据作为比较分析[14-15]。运动开始时的角度定义为0°角,实验轨迹、偏振光和其他探测器的实验数据如图8、表1所示。
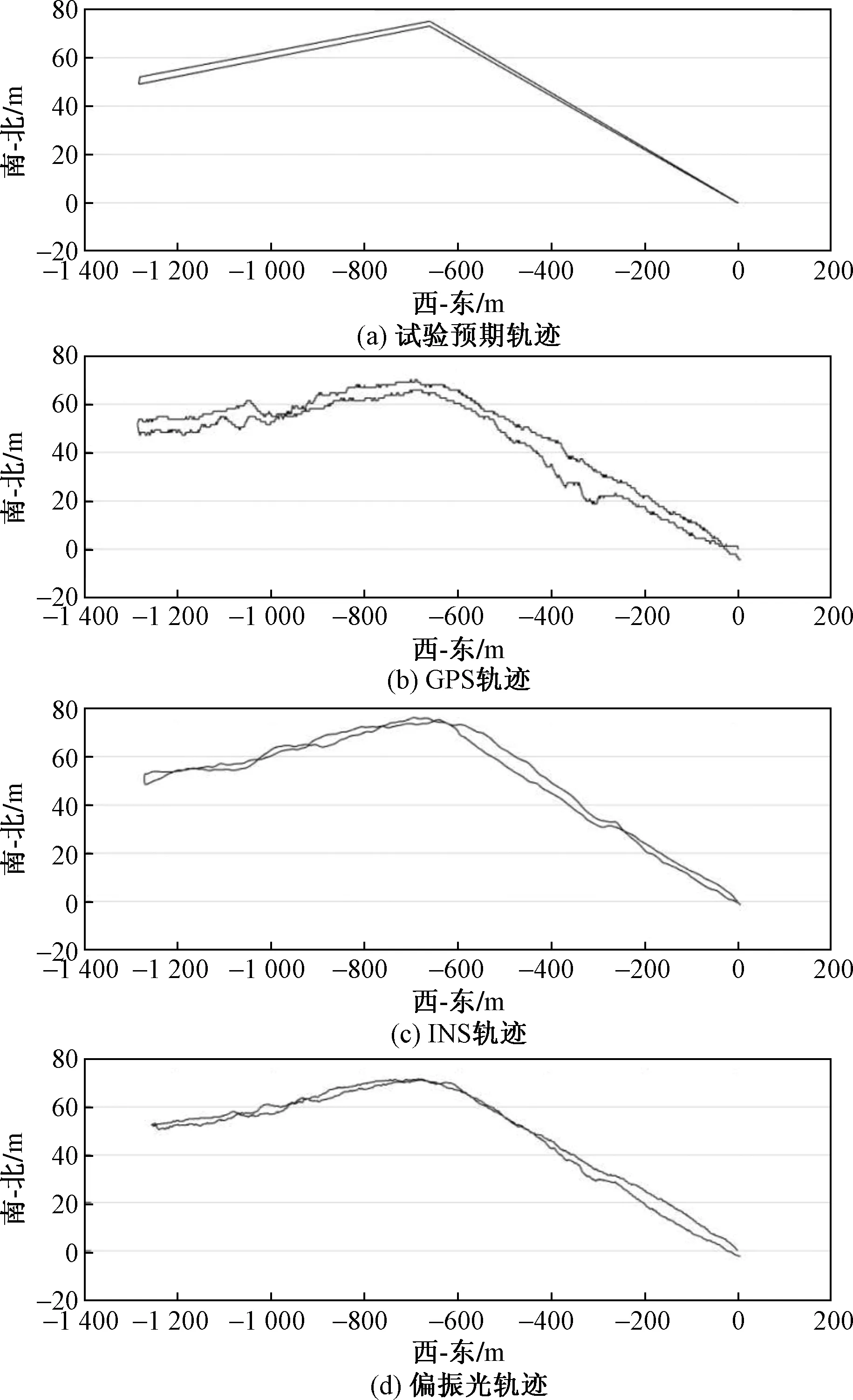
图8 实验轨迹Fig.8 Experimental track

表1 几种导航方式数据对比Table 1 Data comparison of several navigation modes
由实验数据可以看出,GPS导航传感器轨迹偏离平均值为1.17 m,惯性导航传感器轨迹偏离平均值为2.93 m,偏振光导航传感器位置平均偏差2.26 m。
在室内将实验装置搭载在旋台上,间隔10 s依次旋转10°、15°、30°、60°、90°、180°、270°、360°并且每次旋转完毕后10 s回零,其中传感器输出的每两个采样值之间的时间间隔约为0.006 7 s,实验数据如图9所示,从实验数据可以看出该传感器能较好地反映出旋转台的角度变化情况。
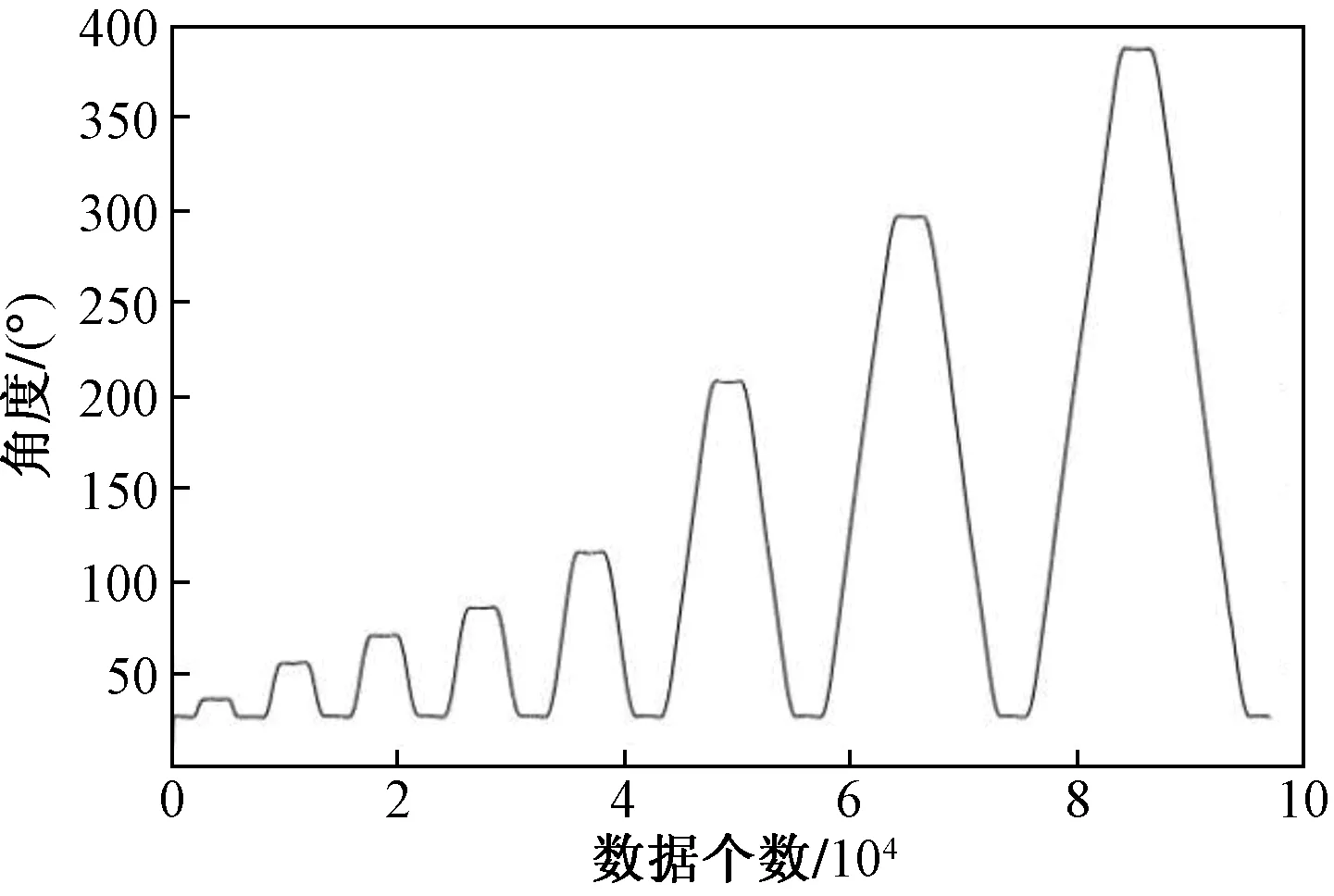
图9 实验数据结果Fig.9 Experimental data and results
截取一段平稳部分与精密转台码盘返回的角度比较,求解航向角的误差[16],结果如图10所示。根据实验数据得出平均误差为0.378°,最大误差为1.047°,平均采样率为300 Hz。
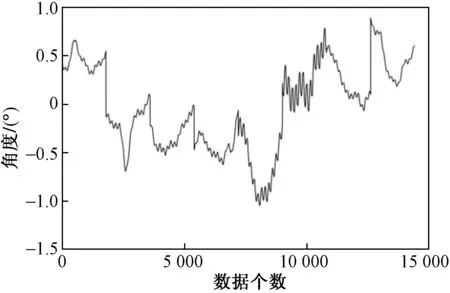
图10 航向角解算误差Fig.10 Heading angle calculation error
4 结论
本文设计了一种旋转式天空偏振光的航向角探测系统,数据量较偏振光成像系统和多通道点源式偏振探测系统小,能快速地实时解算载体的航向角,便于小型化。实验结果可以看出本探测系统可引入GPS、惯导和地磁组合导航系统中,在惯导传感器误差累积和地磁传感器受干扰的情况下修正组合结果进一步提升导航精度,以满足长航时运动载体的导航需要。
