长大下坡路段货车运行速度特性及预测
2022-04-29张驰任士鹏王博张宏吕博
张驰 任士鹏 王博 张宏 吕博
(1.长安大学 公路学院,陕西 西安 710064;2.陕西省交通基础设施建设与管理数字化工程研究中心,陕西 西安 710064)
近年来,我国交通基础设施建设发展迅速,与此同时道路安全问题也日益凸显。随着我国高速公路建设重点向中西部地区的转移,公路线形也愈加受到了中西部地区恶劣地质地形条件的限制。在这种线形限制条件下,形成了较多的连续长下坡路段。货车在连续长下坡路段下坡时,受交通环境影响,驾驶人会频繁使用制动器进行减速,当制动器使用过热时可能会导致制动失灵,进而可能会导致货车发生追尾、碰撞护栏、冲出路基、侧翻等交通事故,严重影响货车的行驶安全[1]。考虑驾驶人实际驾驶行为的运行速度可以有效保证长大下坡线形设计的均衡一致性,因此,研究长大下坡运行速度预测对于提升长大下坡安全性有重要意义。
车辆速度特性能够直接反映出道路上车辆运行的动态规律,也是运行速度预测的基础。国内外学者对车速特性的研究主要集中在速度离散、分布特征及其对交通安全的影响。速度离散及其对交通安全影响方面研究较深入,Solomon[2]于1964年研究了车速和平均车速之间差值与事故率之间的关系,发现两者之间的关系呈“U”形曲线,表明无论是高于还是低于平均车速,车速与平均车速之间的差值越大事故率就越高;Taylor等[3]的研究将车速样本的偏度及峰值与事故率的相关性进行了分析,结果表明,有偏度的速度分布区间比无偏度的速度分布区间具有显著偏高的事故率。曲大义等[4]运用格林希尔治交通流模型研究车辆间距与需求安全距离之间的随机动态关系,表明当速度处于车辆间距小于需求安全距离的范围之内时,随着速度的增加行车危险程度先增加后减小;王昊等[5]发现采用车速标准差来描述车速离散性在反映交通流状态时存在局限性,并基于跟驰理论提出了能够反映交通流动态特性的车速离散度平均速差(ASD)的定义。而在速度分布特征方面,国内研究主要是集中于运用车速数据进行统计学分析,如阎莹等[6]在大量运行速度数据的基础上,运用统计学方法,研究断面车辆运行速度分布特征,结果表明高速公路断面运行车速服从正态分布;李长城等[7]针对不同能见度条件下车辆速度特性,基于交通流Greenshield经典v-K(交通流速度-交通流密度)关系,建立雾天车辆平均行驶速度综合预测模型;Pan等[8]采用聚类分析和概率分布函数拟合相结合的方法研究交通流的速度不均匀性,结果表明混合分布模型比传统单个模型具有更好的拟合能力和通用性。
不同于车辆速度特性研究主要集中在数据的统计分析,国内外对于长大下坡运行速度预测模型的研究分成3类,即由速度数据回归分析得到的实测回归模型、根据汽车运行原理及动力学理论分析得到的理论分析模型、采用仿真软件进行汽车驾驶模拟得到的软件仿真模型。实测回归模型方面,1999年Lamm等[9]基于322条曲线段的数据对v85(第85%分位行驶速度)和水平曲线的特征做了进一步的研究,首先建立了运行速度与平曲线半径之间的关系,随后2000年Fitzpatrick等[10]建立了运行速度与纵断面参数之间的关系;廖军洪等[11]利用断面法采集了10段连续下坡路段的95个断面运行速度数据,考虑运行速度与平均纵坡、坡长和地点的关系建立了货车运行速度预测速度,研究结果证明地点曲率对纵坡运行速度预测模型影响不显著;杜锦涛[12]基于空间三维公路线形几何特征,采集实车数据,并利用神经网络建立小客车运行速度预测模型,但模型考虑因素较为单一;佘明星[13]基于断面车速拟合了运行速度与平均坡度、坡长的关系,但模型没有表现出明显车速规律。理论分析模型方面,符锌砂等[14- 15]分别采用极限功率法及道路线形指标、车辆的动力学特性、驾驶人行为模式等,通过理论分析建立了理论运行速度模型。软件仿真模型方面,陈涛等[16]建立了基于模糊理论的运行车速预测模型,并利用Muti Gen Creator对模糊评价因子进行了仿真,但其模糊感知集仅考虑平纵线形,自变量不全面;郭启明等[17]基于驾驶模拟实验,采集坡度、曲率、超高和动态视距值等模型自变量构建运行速度预测模型,但数据要求精度高,通用程度低。综合来看,理论分析模型及软件仿真模型精度低,且适用条件苛刻,目前国内外绝大多数运行速度预测模型均采用实测回归分析方法。
我国使用范围最广的长大下坡运行速度模型为规范所提出的预测方法。上世纪70年代,美国联邦公路局(FHWA)首先提出了在平曲线车速预测模型的基础上乘以纵坡修正系数得到纵坡路段的运行速度预测模型,我国《公路项目安全性评价规范》(JTGB 05—2015)[18]中沿用了此方法,该模型在预测连续下坡路段运行速度时采用固定坡度范围内根据固定坡长进行折减的方法。然而方法中坡度区间及坡长区间范围均较大,研究路段位于此区间时,过大的纵坡参数阈值导致无法反映准确的运行速度规律,且此方法是直接在一般路段运行速度模型上进行折减,无法表征出长大下坡路段车辆运行的稳定规律,具有较大的局限性。
鉴于此,国内外对车速的研究较为深入,研究均表明车速离散程度对道路事故率有显著影响,且呈现一种正相关关系。不同环境和不同交通状态下的车辆速度具有不同的分布规律。长大下坡作为道路特殊路段,现有研究尚未对此路段的车速特性展开深入研究。并且,现有运行速度预测模型所考虑变量主要集中在平纵线形上,未充分考虑运行速度分布规律及人-车-路-环境的综合影响,在使用过程中有一定的局限性。为此,笔者基于西南地区某高速公路连续长大下坡断面货车速度数据,采用统计学方法研究长大下坡路段的车速分布规律,以此为基础提出了合适的货车运行速度预测模型。该模型对长大下坡货车运行速度模型适用范围及准确性的提升具有重要参考意义。
1 车速数据获取
车辆速度数据来源于西南某高速长大下坡路段布设的高清卡口系统,分别位于北坡K2114、K2110、K2088、K2084及南坡。高清卡口系统通过固定位置布设的摄像头拍摄来往的车辆图像,再用光电技术、图像处理技术、模式识别技术对车辆图像进行识别处理,将得到的车辆信息数据保存。北坡测点分别位于连续长大下坡的坡顶、坡中及坡底位置。经过初步数据筛除,采集到各测点货车车速数据共约78 219条(K2084:10 673条;K2088:30 932条;K2110:20 653条;K2114:15 961条),覆盖时间约为17个连续日,数据包括车牌号、车牌类型、车牌颜色、车辆类型、行驶方向、通道号、经过时间、速度等属性。
该路段设计速度80 km/h,北坡起于K2119,止于K2083,全长36 km。该长大下坡路段年平均日交通量为11 816 veh/h,货车占比为32.11%。
研究路段内,测点K2114附近纵坡为-4.003%,平面线形为半径420、460及870 m的连续曲线路段;测点K2110附近纵坡为-3.995%,平面线形为半径650 m的曲线接直线路段;测点K2088附近纵坡为-2.8%,平面线形为半径560、620 m的连续曲线接直线路段;测点K2084附近纵坡为-2.8%,平面线形为半径347 m的曲线接直线路段。K2114测点接近长大下坡坡顶,K2084测点接近长大下坡坡底。南坡共28 km,其中连续下坡范围为K2004+810-K2030+900,全长约26 km,平均纵坡达到2.56%。
2 货车速度分布特性
高速公路车辆运行速度存在着大量的不确定性与随机性[19]。统计学原理表明:经过大量的统计随机现象会呈现一定的规律性。通过研究车速的该规律性,可以了解断面运行车速的各项特征。本部分根据分析西南地区某高速北坡长大下坡车辆的运行速度数据,总结出长大下坡路段车辆的速度分布整体特性。
2.1 速度空间分布特性
平均速度表示通过观测地点车辆速度的平均值。85%分位速度表示在观测地点的车速中,有85%车辆的地点车速都低于或等于该值,即运行速度V85。根据地点车速数据,分别统计计算不同测点断面的平均速度及V85,以此观察车辆在北坡行驶过程的速度变化情况。计算结果如图1所示。
从图1可以看出,北坡4个测点断面的V85速度在62~66 km/h之间,平均速度在56~60 km/h之间。从速度变化趋势来看,货车平均速度从K2114

图1 各测点断面速度
处的60 km/h逐渐下降到K2088的56 km/h,并趋于稳定到K2084的56 km/h;V85速度从K2114处的65 km/h逐渐下降到K2084的62 km/h,并趋于稳定到K2084的62 km/h。可以看出,在北坡行驶时,随着下坡距离的增长,货车的速度先是逐渐降低,随后趋于稳定。
将货车在各测点断面的速度按照10 km/h一个区间进行划分,统计不同速度区间车辆所占的比例,结果如图2所示。
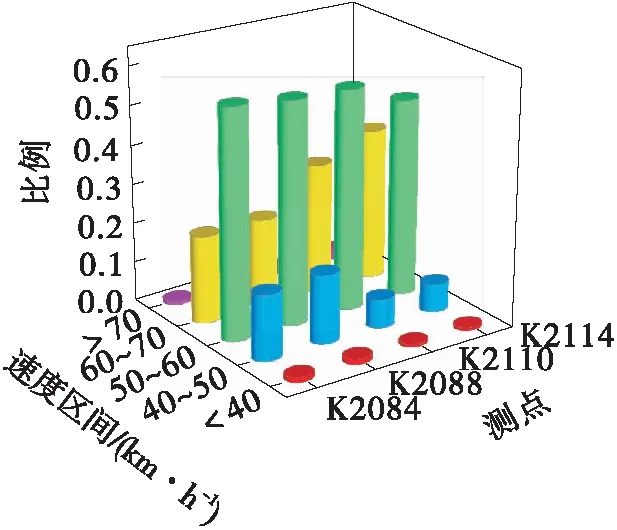
图2 各测点速度区间比例
从图2可以看出,北坡各测点速度区间比例最高的均为50~60 km/h,分别占48.70%、55.65%、56.46%以及57.13%;遵循限速(60~70 km/h)行驶的车辆占比分别为41.62%、29.85%、23.14%以及20.77%;超速车(>70 km/h)的比例分别为3.71%、2.26%、1.34%和1.92%;低速车(<40及40~50 km/h)的比例分别为0.69%、1.16%、1.50%和1.77%以及5.28%、11.08%、17.55%和18.40%。
可以看出,在北坡行驶的过程中,随着下坡距离的增加,高速车辆的比例逐渐减少,速度在较低区间(50~60 km/h)及低速(<40及40~50 km/h)行驶的车辆比例逐渐增加。由此可见,随着下坡距离的增加,货车行驶速度在整体上向低速发展。从各区间速度占比的变化情况来看,北坡前段(K2114~K2110)速度区间比例发生变化,随后趋于一种稳定状态。
2.2 速度时间分布特性
统计并计算一天24 h内车辆平均速度及V85速度,以观察货车不同时间段内在北坡行驶时的速度变化情况。相关研究表明[20],相比于白天,夜间行车危险性更高,驾驶员驾驶车辆也更为谨慎。根据实车数据,不同时间段的道路交通量也具有明显差异。考虑到驾驶员驾驶行为谨慎性及路段交通量差异,参照西南地区春夏季日照时刻统计,将所有数据按照时间划分为4个时间段进行统计计算:凌晨(0:00~6:00)、上午(6:00~12:00)、下午(12:00~18:00)以及晚上(18:00~24:00)。计算结果如图3所示。

(a)平均速度

(b)V85速度
由图3可以看出,不同时间段内北坡各测点V85速度均在61~66 km/h之间,平均速度在54~61 km/h之间。夜间(18:00~6:00)的V85速度和平均速度均稍小于白天(6:00~18:00),相较于白天,各测点夜间V85速度和平均速度平均下降了3~4 km/h,这是因为夜间行车光线较弱,视距变短,驾驶人的感知能力和判断能力下降,加之处于长大下坡路段,驾驶人通常会采取比白天更为谨慎的驾驶操作。
参照空间分布特性,以10 km/h为一个区间进行划分,统计不同时段不同速度区间车辆所占的比例,进一步分析各测点速度随时间的分布情况。如图4所示。
总体来看,不同时段北坡各测点速度区间所占比例最大的均为50~60 km/h;其次为60~70 km/h及40~50 km/h;<40 km/h、70~80 km/h及>80 km/h速度区间的比例较小,均小于5%。
相较于白天,夜间速度区间在50 km/h以下的车辆比例增长了9.45%;在50~60 km/h内的比例增长了4.67%;60~70 km/h内的比例降低了12.07%;70 km/h以上的比例降低了2.05%。由此可见,各测点速度时间分布基本为夜间低速车(<50 km/h)及较低速车(50~60 km/h)比例较高,白天正常速度区间(60~70 km/h)及高速车(>70 km/h)车辆占比较高。
结合上文所分析北坡V85速度和平均速度,说明长大下坡不同时段速度趋势表现为速度集中在一个速度区间,越偏离此速度区间,车辆比例越低,白天高速车占比普遍比夜间稍大,但差异不明显。
2.3 速度空间离散特性
大量研究[2- 4]表明,车辆行驶速度与平均速度差异过大,是造成高速公路事故发生率上升的重要因素,通常将这种现象称为车辆速度离散。车速的离散性是研究车辆行驶规律及保证车辆行车安全的一个关键点。车速离散度通常由车速标准差(SD)、V85-V15(即第85%分位行驶速度与第15%分位行驶速度差值)(极差)、变异系数、平均邻车速差(ASD)[5]等表述。本文中选用车速标准差(SD)及平均邻车速差(ASD)来表述路段的车速离散度。平均邻车速差(ASD)表达式如式(1)所示:
(1)

(a)K2114

(b)K2110

(c)K2088

(d)K2084
式中,φASD为ASD值,vi为第i辆通过观测点的速度。
计算北坡4个测点及南坡的车速标准差及平均邻车速差,结果如表1所示。
从表1可以看出,北坡各测速点的车速标准差均在5.89~6.92 km/h之间,平均邻车速差均在5.12~6.42 km/h之间。随着下坡距离的增长,速度离散性逐渐增加,但增长的幅度较小。南坡车速标准差为8.75 km/h,平均邻车速差为8.99 km/h,北坡和南坡整体速度离散程度较低,可见长大下坡路段车辆速度离散性好于一般路段[21- 22]。南坡速度离散性较北坡大,这与北坡采取客货车分道行驶措施有关

表1 各测点SD与ASD值
。
2.4 速度时间离散特性
同2.2节速度时间分布特性分类,将所有数据按照时间划分为4个时间段进行统计计算:凌晨(0:00~6:00)、上午(6:00~12:00)、下午(12:00~18:00)以及晚上(18:00~24:00),得到北坡4个测点及南坡的车速标准差及平均邻车速差,结果如表2和表3所示。

表2 各测点分时段SD值

表3 各测点分时段ASD值
从表2和表3可以看出,北坡4个时段车速标准差均在4.98~7.45 km/h之间,平均邻车速差均在4.66~6.59 km/h之间,南坡4个时段车速标准差均在8.22~9.12 km/h之间,平均邻车速差均在8.67~9.20 km/h之间,车速离散性与整体车速离散性差异较小。4个时段中,北坡凌晨车速离散性最高,下午车速离散性最低,车速离散性与交通量形成负相关关系,整体趋势表现为长大下坡路段随着交通量的增大,速度离散性逐渐减小。
3 车速的分布假设检验
国内外相关研究表明:在乡村公路和高速公路上,运行车速一般呈正态分布[23- 24]。长大下坡作为公路的特殊路段,其车辆的运行速度分布规律尚未有研究说明。文中采用单样本K-S检验定量分析及Q-Q图检验定性分析相结合的方法分析研究路段断面车速分布特征,检验均在SPSS软件上进行。
3.1 单样本的K-S检验
单样本的K-S检验又称为单样本柯尔莫哥罗夫-斯米诺夫检验,主要运用某随机变量顺序样本来构造样本分布函数,使得能以一定的概率保证X的分布函数F(X)落在某个范围内,用于检验变量是否服从某一分布[6]。
本检验原假设为:样本的总体与正态分布无明显差异,显著性为0.05。检验结果如表4所示。

表4 北坡及南坡各测点车速分布Kolmogorov-Smirnov检验结果
从检验结果可以看出,K-S检验统计量Z值均小于0.5 km/h,渐近双尾显著性P值均小于0.05,拒绝原假设。结论显示长大下坡路段车速分布与一般路段不同,即其不符合一般路段车速呈正态分布的规律。
3.2 Q-Q图分布检验
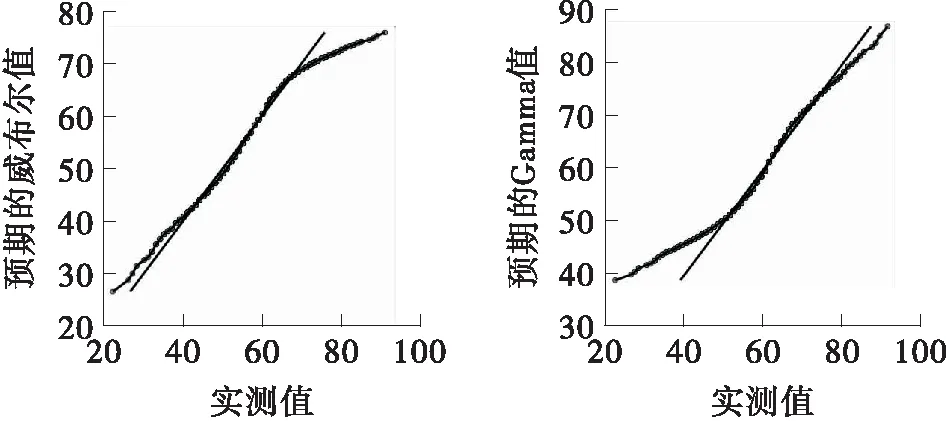
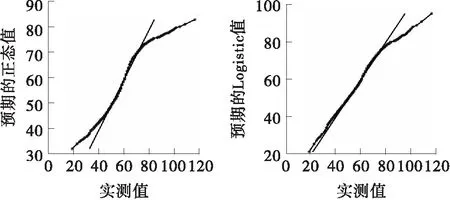
阎莹等[6]在对断面运行车速特征进行研究时,根据其频率分布直方图中间较为集中,两边较为分散的特点,用正态分布、威布尔分布、伽马分布以及Logistic分布对车速数据进行了分布拟合检验。正态分布和Logistic分布具有对称性,威布尔分布和伽马分布具有不对称性。下面对各断面车速均进行正态分布、Logistic分布、威布尔分布、伽马分布的Q-Q图分布检验,检验结果如图5-图9所示。
从上述各断面4种分布检验Q-Q图可以看出,各断面上4种分布的拟合优度差异较大,总体上Logistic分布比正态分布、威布尔分布、伽马分布的拟合效果更好,偏差更小,尤其是北坡K2114断面、K2088断面及南坡断面基本拟合。根据上述研究中对正态分布的K-S定量检验结果,结合此Q-Q图可看出长大下坡路段断面车辆速度基本符合Logisitc分布。Logisitc分布十分均匀,虽然与正态分布类似,但与正态分布相比两级分化程度更小,即速度高度集中且对称于高峰速度值。

(a)正态分布 (b)Logistic分布
(c)威布尔分布 (d)伽马分布

图5 K2114断面Q-Q概率分布图
(a)正态分布 (b)Logistic分布

(c)威布尔分布 (d)伽马分布
图6 K2110断面Q-Q概率分布图

(a)正态分布 (b)Logistic分布

(c)威布尔分布 (d)伽马分布
图7 K2088断面Q-Q概率分布图

(a)正态分布 (b)Logistic分布

(c)威布尔分布 (d)伽马分布
图8 K2084断面Q-Q概率分布图

(a)正态分布 (b)Logistic分布

(c)威布尔分布 (d)伽马分布
图9 南坡断面Q-Q概率分布图
4 运行速度预测模型适应性分析
综合上述研究可得到,长大下坡路段,货车车速离散程度较低,随着下坡距离的增长,货车的速度先是逐渐降低,随后趋于稳定,且货车车速离散程度随着下坡距离及交通量增长而增加;货车车速特性不随时段变化而产生明显差异;货车断面车速高度集中于中间范围内,断面车速可由中间区间速度值来表征。基于货车行驶速度分布特性,需检验现有长大下坡路段货车运行速度模型适应性。
4.1 运行速度预测模型选择
受坡度坡长及平面线形的制约,长大下坡路段货车运行速度较之一般路段有很大不同。本文选取《公路项目安全性评价规范》[18]中关于运行速度的预测模型和基于特征断面运行速度的长大下坡路段运行速度预测模型[11]作为研究基础。
(1)《公路项目安全性评价规范》
按照平纵线形将道路分为平直路段、纵坡路段、平曲线路段及弯坡组合路段等分析单元,确定起始单元的初始运行速度,根据规范给定的各路段运行速度预测模型计算起始单元末端运行速度,以此作为下一单元的初始运行速度,往复迭代得到各单元的运行速度。
(2)基于特征断面运行速度的长大下坡路段运行速度预测模型
通过建立运行速度与累计坡长、地点平均纵坡及地点曲率的关系,根据特征断面运行速度数据分析,加入地点曲率变量后导致模型拟合优度和显著性降低,故剔除地点曲率变量后得到长大下坡大货车运行速度预测模型如下:
vtruck=exp[4.149 1+0.188 lnG+0.036 6×
(lnG)2+0.124 1 lnL-0.112 9 lnLlnG]
(2)
式中,vtruck为大货车运行速度V85,G为地点平均纵坡坡度,即车辆至坡顶的平均纵坡坡度,L为累计坡长,即车辆至连续长大下坡坡顶的累计长度。
4.2 预测运行速度与实测速度对比
根据上述两种运行速度预测模型计算得出北坡4个测点的运行速度,根据研究路段设计速度对使用模型预测的初始运行速度及期望速度进行调整,预测结果如表5和图10所示。

表5 各测点模型预测与实测车速值

图10 各测点模型预测与实测车速对比图
由上述分析得出,在本路段,随着下坡距离的增长,货车的速度先是逐渐降低,随后趋于稳定,区段行驶可分为主动减速区段-跟车减速区段-跟车稳速区段。《公路项目安全性评价规范》预测货车运行速度虽局部路段有所降低,但整体呈加速趋势,并且终将会加速至期望速度,与实际运行速度误差较大。基于特征断面运行速度的预测模型结果为随着下坡距离的增长,货车的速度先是逐渐升高,随后趋于稳定,后段运行速度趋势与实测相似,即都反映出货车在长大下坡路段行驶随着下坡距离的增长终将达到稳定速度,但前段运行速度趋势与实测相反。
4.3 速度误差原因分析
根据实测车速与预测运行速度对比结果可知,规范预测方法预测长大下坡货车运行速度偏差较大,基于特征断面运行速度的预测模型可反映出后段的趋势,但前段符合程度较低。研究表明[25],车辆运行速度并不仅仅受道路平纵线形影响,而是人-车-路-环境综合影响,影响因素主要有以下几个方面:
(1)交通密度因素。根据交通流理论[26],交通密度很小时,密度对速度的影响是指数模型。交通密度适中时,密度对速度的影响是线性模型。交通密度很大时,密度对速度的影响是对数模型。长大下坡路段行驶的车辆处于不同的交通密度状态之下,密度对速度的影响也是不同。长大下坡路段坡长较长,坡内通常存在立交等结构物,车辆的流入流出容易导致交通量的改变,从而影响交通密度的大小。一般长大下坡路段交通密度都较小,其与最佳交通密度的差值也较大。较小的交通密度状态下,速度随密度的增长下降得更快。两种运行速度预测模型未考虑到交通密度对速度的影响,将整条路段货车运行视为交通密度趋于零的状态,故预测结果与实测偏差较大。
(2)驾驶人因素。受长大下坡路段坡度及坡长的影响,为了保证行车安全,货车在下坡时,驾驶人会采取较多的制动行为。受频繁制动影响,货车速度会随着下坡距离的增长而逐渐降低。同时本研究路段为双向四车道高速公路,货车在下坡时只在专用车道行驶,且交通密度很小,驾驶人一般不会采取超车或变道等加速行为。两种运行速度模型均表现出了速度随着下坡距离增长而增加的加速趋势,与实际不符。
(3)车辆因素。货车下坡时一般会挂低档位,受档位影响,速度存在上限,上限值与其档位大小有关。现有运行速度模型虽表现出稳定速度作为其运行速度上限值的规律,但此稳定速度与实际档位上限速度相比具有差异性,整体高于实际档位上限速度。
5 运行速度预测模型修正及有效性 分析
丁志勇等[27]提出在基于空间曲率的速度预测方法基础上,考虑预测点所处长大下坡位置及特殊结构物路段因素进行长大纵坡运行速度预测模型修正。根据文中研究内容,基于特征断面运行速度的预测模型虽前段与实测数据趋势不符,但整体优于《公路项目安全性评价规范》预测运行速度,且其考虑了累计坡长、地点平均纵坡及地点曲率,表现出了稳定的运行规律,故选择此运行速度预测模型,按照上述修正方法进行模型修正。
基于特征断面运行速度的预测模型可以简化为下式:
vtruck=f(G)g(L)
(3)
结合上述速度误差原因分析,可从交通密度方面进行修正。基于研究路段平均流量、最大交通量及区间平均车速,求得交通密度值K及最佳交通密度值Km。本路段交通密度很小,故选择Underwood速度-密度关系指数模型[28]进行修正分析。将预测模型作为Underwood速度-密度关系中的畅行速度,结合路段实际交通密度值K及最佳交通密度值Km得到修正模型。
交通密度求取公式[29]为
(4)
式中,K表示平均交通密度,Q表示平均流量,v表示区间平均车速。
时间平均车速与区间平均车速的关系为
(5)

由此可得各断面区间平均车速如表6所示。

表6 各断面平均车速值
本路段2020年年平均日交通量为11 816 veh/d,货车占比为32.11%。因本路段采用分车道分车型限速交通管制措施,货车只在专用车道行驶,故交通密度只考虑货车因素。货车年平均日交通量为3 794辆,研究路段位于西南地区,高峰小时系数选取为0.09。
根据交通流理论,路段最大交通量可根据实际通行能力确定。实际通行能力可由基本通行能力修正得到:
C实=CfwfswfHV
(6)
式中:C实表示实际通行能力;C表示基本通行能力;fw表示车道宽度修正系数;fsw表示硬路肩宽度修正系数;fHV表示纵坡度修正系数,其值与货车交通量比重、坡度及坡长有关,即
(7)
式中,PT表示货车交通量占总交通量的百分比,ET表示车辆折算系数。
各参数取值及计算得实际通行能力结果如表7所示。

表7 通行能力计算结果
根据Underwood速度-密度关系,当交通流密度很小时,速度与密度之间为指数关系,即
(8)
式中:vf表示畅行速度,即车流密度趋于零时车辆的平均速度。
由以上论述可得到本研究路段各断面处货车实际交通量及各交通密度如表8所示。

表8 各断面交通密度
用Underwood速度-密度指数模型对基于特征断面运行速度的预测模型进行修正,修正后的模型为
(9)
计算得运行速度修正值如表9所示。

表9 各断面运行速度修正值
将未修正模型及修正模型分别与实测车速进行对比,分析修正模型有效性。文中采用相对误差衡量模型的精度,相对误差[30]计算式如下:
(10)
式中,Δv为相对误差,vtruck为预测模型预测速度,vp为实测速度。
按上式分别对两预测模型计算相对误差,结果如表10所示。

表10 修正模型相对误差
由表10可知,未修正模型预测速度的相对误差分别为4.227%、12.667%、14.871%、14.758%;修正模型预测速度的相对误差分别为0.166%、3.603%、1.194%、1.516%,修正模型预测速度的相对误差相比于未修正模型分别降低了4.061%、9.064%、13.677%、13.242%,模型有效性明显提升。
6 结语
文中利用西南某高速特征断面长大下坡车速数据,得到长大下坡路段货车行驶速度分布特性,并在现有长大下坡货车运行速度预测模型基础上进行误差分析及修正,得到以下结论。
(1)在长大下坡路段行驶过程中,随着下坡距离的增长,货车速度先逐渐降低,随后趋于稳定。长大下坡路段,货车车速离散程度随着下坡距离及交通量增长而增加;货车车速特性不随时段变化产生明显差异。对长大下坡车速数据进行分布检验,检验结果表明长大下坡路段断面车速符合Logistic分布,速度高度集中且对称于高峰速度值。
(2)未考虑交通密度是导致现有运行速度预测模型与实测运行速度不一致的主要因素。在基于特征断面运行速度的预测模型基础上,根据交通流基本图理论Underwood速度-密度关系指数模型,考虑实际交通密度和最佳交通密度对其进行了模型修正,修正后的模型相对误差降低了4%~14%,模型有效性明显提升。
(3)本模型应用于不同限速条件下的路段时,需根据限速值与设计速度的差异进行运行速度的折减。同时本研究成果为自由流状态下车流密度很小时长大下坡路段货车运行速度预测修正,对于车流密度适中及很大情况时的长大下坡路段应结合其它基本图理论v-K关系模型修正验证。
