对定点运动刚体欧拉角的独立性及坐标变换矩阵的分析
2022-04-28王士敏
张 媛 王士敏 王 琪
(北京航空航天大学,北京 100083)
描述刚体定点运动姿态的欧拉角作为一组广义坐标是独立的,即,任意一个欧拉角的变化不会引起其余两个的变化,并且与欧拉角相对应的转动也与顺序无关,这与通常情况下定点运动刚体的有限位移与转动顺序有关并不矛盾,或者说欧拉角对应的转动与顺序无关是一个特例。在教学过程中,导出随体坐标系到固定坐标系的变换矩阵时,往往又是规定了先进动再章动最后自转的顺序,很容易引起学生困惑:既然欧拉角的变化与顺序无关,为何这时又要规定顺序?这里,对上述问题说明以下两点:(1)欧拉角作为一组广义坐标,其与变化顺序无关;(2) 将有限位移分解为三次定轴转动建立变换矩阵时,在可能的转动顺序中,存在一个特定的顺序,使得变换关系最为简单,即,按其他顺序也可以导出相同的最终变换矩阵,只是中间变换矩阵相对复杂。
1 欧拉角的独立性
设固定坐标轴的三个单位向量为(i,j,k),定点运动刚体随体坐标轴的三个单位向量为(i′,j′,k′),定义n=k×k′,即所谓的节线方向。由此即可定义欧拉角:k轴与k′轴之间的夹角为章动角θ,节线n与i轴之间的夹角为进动角ψ,i′轴与节线n之间的夹角为自转角φ,如图1 所示。

图1 节线与欧拉角的定义
从图1 可以看出,刚体姿态的变化可以分解为绕k,n和k′三根轴的转动,不难验证,刚体绕上述三根轴中的任意一根轴做定轴转动时,仅有一个欧拉角随之变化,也就是说欧拉角是独立的;从一组欧拉角(ψ0, θ0, φ0)到另一组欧拉角(ψ1, θ1, φ1)的有限位移,可以依次绕上述三根轴转动相应的角度差而实现,且与顺序无关。可以这样来理解,定点运动刚体的有限位移分解为一组定轴转动时,多种情况下是与转动顺序有关的,但是绕上述三根轴转动时与顺序无关,这也是用欧拉角作为广义坐标的必要条件。值得注意的是,当自转轴k′与固定轴k重合时,节线的方向不确定,这时刚体的运动退化为定轴转动,转角为β=ψ+φ,单纯从运动学上来看,在此情况下没有必要将转角分为进动和自转,一旦k和k′两轴分开,节线自动生成,进动角和自转角也随之确定。
2 中间坐标系与变换矩阵
用欧拉角作为广义坐标表示定点运动刚体上任意一点的位置时,通常需要导出一个从随体坐标到固定坐标的变换矩阵,导出该变换矩阵时,是按先进动ψ,再章动θ,最后自转φ的顺序进行的,这个“顺序”似乎与第1 节所讨论的欧拉角的变化与顺序无关相矛盾,下面将说明,这个顺序只是为了让每次定轴转动的变换矩阵更为简单,或者说按任何顺序都可以导出最终相同的变换矩阵,只是按不同顺序,每次转动所给出的中间变换矩阵的复杂程度不同。
2.1 中间坐标系
为了便于讨论和欧拉角相对应的转动与顺序的无关性,以及导出随体坐标与固定坐标的变换矩阵,这里引入两个中间坐标系,设Oxyz为固定坐标系,其坐标轴的三个单位向量分别为(i,j,k),第一个中间坐标系定义为绕z轴做定轴转动的坐标系,其三个坐标轴的单位向量分别为(n,k×n,k) 如图2(a)所示,即该坐标系和固定坐标系有共同的坐标轴z,单位向量n所对应的坐标轴,也称为节线,与x的夹角为ψ,即进动角;第二个中间坐标系定义为绕节线n做定轴转动的坐标系,其三个坐标轴的单位向量分别为(n,k′×n,k′),如图2(b) 所示,其中,单位向量k′所对应的坐标轴也称为自转轴,它与z轴的夹角为θ,即章动角;最后,定义随体坐标系,其三个单位向量分别为(i′,j′,k′),如图2(c) 所示,随体坐标系绕着k′所对应的坐标轴,也称为自转轴作定轴转动,其中,i′与节线n的夹角为φ,也称为自转角。
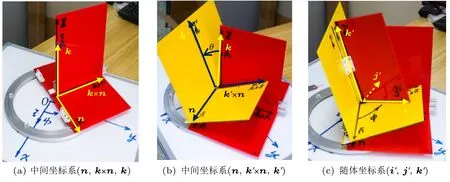
图2 中间坐标系与随体坐标系
下面将说明,借助上述中间坐标系,从随体坐标系到固定坐标系的变换矩阵可以由一组简单的变换矩阵构成。
2.2 利用中间坐标系的变换矩阵
考察 2.1 节的四个坐标系可以发现:固定坐标系(i,j,k) 和中间坐标系(n,k×n,k) 之间有共同的坐标轴k;两个中间坐标系(n,k′×n,k′) 和(n,k×n,k) 之间有共同的坐标轴n;中间坐标系(n,k′×n,k′) 与随体坐标系(i′,j′,k′) 有共同的坐标轴k′。上述存在共同坐标轴的坐标系之间的变换关系分别如下:
随体坐标系(i′,j′,k′)与中间坐标系(n,k′×n,k′)的变换关系,当随体坐标系上的一点,设其矢径为r′,随(i′,j′,k′) 绕k′轴转过φ角后,该点在(n,k′×n,k′) 坐标系下的矢径rk′n为

其中
两个中间坐标系(n,k×n,k) 和(n,k′×n,k′)之间的变换关系,当坐标系(n,k′×n,k′)上的一点,设其矢径为rk′n,随(n,k′×n,k′)绕n轴转过θ角后,该点在(n,k×n,k) 坐标系下的矢径rkn为

其中

中间坐标系(n,k×n,k)和固定坐标系(i,j,k)之间变换关系,当坐标系(n,k×n,k)上的一点,设其矢径为rkn,随(n,k×n,k) 绕z轴转过ψ角后,该点在坐标系(i,j,k) 下的矢径r为

其中
式(2),式(4),式(6) 给出的变换矩阵,各对应一个欧拉角的变化,或者说,各对应一个坐标系变换矩阵,分别是随体坐标系(i′,j′,k′) 到中间坐标系(n,k′×n,k′)、两个中间坐标系之间、中间坐标系(n,k×n,k) 到固定坐标系。对于给定的欧拉角,欲求刚体上一点的随体坐标与固定坐标的变换关系,可以利用上述中间变换,按“顺序” 将其随体坐标逐次“过渡” 到固定坐标,即,利用式(1) 将随体坐标过渡到(n,k′×n,k′) 坐标,再由式(3) 过渡到(n,k×n,k)坐标,最后由式(5)过渡到固定坐标系,得到

上述逐次代入的“顺序”是由四个坐标系之间的相对位置关系决定的,或者说,这四个坐标系是由三个“共同坐标轴” 按“顺序” 串联起来的,由此决定了上述代入顺序。这样做的目的是为了利用三次简单的中间变换,得到随体坐标到固定坐标系之间的变换矩阵A(ψ)A(θ)A(φ)。同时,利用中间坐标系,由式(2),式(4),式(6)可以给出上述四个坐标系中任意两个坐标系之间的变换关系,例如,随体坐标系到坐标系(n,k×n,k)间的变换矩阵是A(θ)A(φ),中间坐标系(n,k′×n,k′)到固定坐标系的变换矩阵则是A(ψ)A(θ)。
2.3 固定坐标系下的定轴转动变换
将有限位移分解为定轴转动时,不引入中间坐标系,也可以在固定坐标系下直接给出每次转动以及最终位置的变换关系。例如:刚体从初始欧拉角(0,0,0)到给定欧拉角(ψ,θ,0)的有限位移,可以分解为两次定轴转动,如图3 所示,下面我们在固定坐标系下,按两种方案分别将刚体有限位移分解为两次定轴转动,并求出刚体上的一点M在每次转动后的位置变化。第一种方式是从初始位置,如图3(a)所示,令刚体绕x轴转动角度θ,如图3(b)所示,然后再绕z轴转动角度ψ,如图3(c) 所示;第二种则是先绕z转动角度ψ,如图3(e) 所示,再绕随体轴n转动角度θ,如图3(f)所示,其中n轴在xy平面内,与x轴夹角为ψ。下面在固定坐标系下分析每次转动后M点的位置变化。

图3 刚体有限位移按不同方式分解为定轴转动
首先可以看出,两种转动方式给出的最终位置相同。第一种情况,设M点在固定坐标系下的初始、第一次和第二次转动后的位置向量分别为ra,rb和rc,三个位置向量之间的变换关系为:rb=B(θ)ra,rc=B(ψ)rb,将前面的公式代入后面可得

其中,式(8) 中的两个矩阵分别与式(4),式(6) 右端的矩阵相同,即,B(θ) =A(θ),B(ψ) =A(ψ),也是简单的变换矩阵。
第二种情况,由于M点初始和最终的位置向量和第一种情况相同,分别为ra和rc,设第一次转动后在固定坐标系下的位置向量为rd,有

其中,C(ψ)的表达式仍然与式(6)右端给出的矩阵相同,C(ψ) =A(ψ)。但是,当绕n轴做第二次转动时,M点的三个坐标都发生变化,同时,由于n轴的位置与ψ有关,变换矩阵也必将与ψ有关。由于在两种情况下,M点都是由初始位置ra出发,最终达到同样的位置rc,因此,可以利用式(8),式(9)来导出rc和rd之间的变换矩阵,求式(9) 的逆有ra=C−1(ψ)rd,将该式代入式(8) 可得

从式(10) 不难看出其中的变换矩阵的复杂程度。
利用式(7) 也可以直接导出固定坐标系下的rc和rd之间的变换矩阵,令欧拉角为(ψ,0,0), 由于初始位置随体坐标系与固定坐标系重合ra=r′,有rd=C(ψ)ra,或ra=A(ψ)−1rd,再令欧拉角为(ψ,θ,0) 有rc=A(ψ)A(θ)ra,因此

本节例子说明,定轴转动刚体上任意一点的位置变化取决于轴的位置和转角,同一坐标系下,当转轴是坐标轴时,两个坐标系绕着共同坐标轴作相对转动时,变换关系最为简单。
3 结论
欧拉角是一组独立的广义坐标,如果将定点运动刚体的有限位移分解为绕固定坐标系的z轴、随体坐标系的自转轴z′和节线n=k×k′的定轴转动,刚体的姿态变化与转动顺序无关。利用上述三根轴可以构造出两个中间坐标系,每次转动都是绕着两个坐标系的共同坐标轴进行的,因此,每次转动的变换矩阵都相对简单。给定欧拉角,确定刚体上某点的随体坐标与固定坐标的变换矩阵时,需要将三个中间变换矩阵按顺序相乘,这个顺序是由四个坐标系的位置关系决定的,即,取决于三个“共同坐标轴”串联起四个坐标系的“顺序”,这个“顺序”并非是欧拉角变化必须遵循的顺序。不引入中间坐标系,也可以导出同样的随体坐标与固定坐标的变换矩阵,只是每次转动的变换关系相对复杂。
