基于多源遥感数据融合的土壤水分反演研究
2022-04-28潘晓婷马丽丽
邓 超 ,苏 南 ,潘晓婷 ,马丽丽 ,林 薇
(1.水利部南京水利水文自动化研究所,江苏 南京 210012;2.扬州市生态环境局, 江苏 扬州 225000)
0 引言
土壤水分是地球生态系统的重要组成部分,是陆地-大气系统间水热传输和能量交换的重要基础,也是联系地表与地下水循环、陆地间碳循环的关键纽带[1],因此,对土壤水分状况的实时精准监测对农业生产、水循环及气候变化等均具有重要意义。而城市土壤水分则是绿地植物重要的水分来源,也是城市生态系统中物质能量循环的重要载体。张力计、时域反射仪(TDR)、频域反射仪(FDR)等野外快速测定土壤水分含量的方法已被广泛采用[2],但是这些方法极易受仪器安装及数据采集位置的影响,仅适用于小面积采样点数据的获取,难以实现大面积土壤水分含量的快速、精准获取,且需要耗费大量的人力、物力和财力。
近年来,遥感技术以其覆盖面积大、更新速度快、光谱信息丰富等优势被广泛应用于大面积土壤水分含量的反演中。光学遥感可用于土壤水分的反演,其原理是基于土壤及土壤上植被的光谱反射和其表面发射等特性,通过地表温度或植被指数等间接指标反演土壤水分。在光学遥感方面,常用可见光-近红外、热红外光谱进行土壤水分反演,主要方法包括反射率法、植被指数法、地表温度反演法。Kogan[3]提出植被条件指数(VCI)估算干旱区土壤含水量,相较其他动态监测方法效果更佳;Goetz[4]研究证实土壤含水量与地表温度、归一化植被指数斜率之间存在相关关系;余涛等[5]通过简化地表能量平衡方程得到真实热惯量值,进一步得出土壤含水量的分布;Liu 等[6]研究发现土壤含水量与光谱反射率之间存在相关关系,奠定了反射率法反演土壤水分的基础;魏国栓等[7]基于 MODIS 数据建立地表温度-归一化植被指数间的特征空间,通过温度植被干旱指数(TVDI)对仪征地区进行土壤水分反演;王秀君等[8]利用 Landsat TM 数据构建地表温度-增强植被指数间的特征空间,基于 TVDI 指数反演黄骅市土壤水分。现有研究表明:通过构建光谱指数、地表温度和地形数据为建模因子,并结合偏最小二乘(PLSR)、支持向量机(SVM)和随机森林(RF)等建模方法构建土壤水分反演模型,可实现土壤水分的遥感反演[9-10]。但是,现有研究大多采用单一遥感数据源进行研究,并没有将多种遥感数据源相结合,因此,反演精度有限。
本研究以南京市金川河流域为研究区,以哨兵 2 号和 Landsat 8 的遥感数据为数据源,并进行融合,研究分析土壤含水量与遥感数据源的关系,进行建模预测和验证,生成研究区土壤水分的专题图件。
1 数据与研究方法
研究区位于江苏省南京市金川河流域,面积约为 114 km2,属宁镇扬丘陵地区,平均海拔为 18 m,属北亚热带湿润气候,四季分明,雨水充沛,年平均温度为 15 ℃,年平均降水量为 1 106 mm。
1.1 遥感数据获取与预处理
Landsat 8 数据源通过美国地质调查局(USGS)官网(https://earthexplorer.usgs.gov/)下载,过境时间为 2021年3月26日,轨道号为 120/38,云量小于 1%。本研究所用数据为空间分辨率为 30 m 的前 7 个波段的影像,不涉及全色波段,并采用 ENVI 5.3 软件进行辐射定标、FLAASH 大气校正,将原始图像转换为地表表观反射率。
哨兵 2 号 L1C 数据通过 https://scihub.copernicus.eu/下载获取,过境时间为 2021年3月22日,轨道号为 209/132,无云覆盖。因 L1C 级产品是经过正射和几何精校正的大气表观反射率产品,并没有进行大气校正,所以采用 Sen2Cor 软件对其进行辐射定标和大气校正,获取 L2A 级产品,以获取基层反射率数据。哨兵 2 号影像 12 个波段的空间分辨率不一致,分为 10,20 和 60 m,本研究分辨率统一为 10 m 。
由于哨兵 2 号和 Landsat 8 的空间分辨率不同,如果要将两者同时用于后续模型建立,须先进行空间分辨率的匹配,将其重采样为 30 m 空间分辨率,以保证每个栅格在 2 个数据源影像上相对应。
1.2 土壤样品采集与水分测定
1.2.1 土壤样品采集
结合本研究区地形和土地利用状况,沿金川河流域布设 17 个土壤采样点,尽量做到间距均匀,为后面预测模型的建立提供支持。另外,为保证生成图件的准确性,特进行土壤采样点的加密布设,采用梅花采样法采集土壤样品,用土钻在 5 个点上钻取表层 0~20 cm 的土壤深度,5 点混合后的样品为该采样点的土壤样品,为防止水分蒸发,将土壤样品装入可密封的自封袋中,带回实验室测定土壤含水量。土壤样品采集于 2021年3月23日进行, 每一采样点均利用 Trimble GEO XT(2008)GPS 设备记录坐标信息,星基差分后定位精度可达亚米级。
1.2.2 土壤含水量测定
土壤含水量为质量含水量,采用操作简单、测量准确、应用广泛的烘干法测得,详见参考文献 2。
1.3 建模与模型精度评价
1.3.1 模型建立
本研究选取 PLSR 、最小二乘-支持向量机(LS-SVM)、反向传播神经网络(BPNN)和 RF 4 种方法,通过 Matlab 2017b 软件构建模型。以融合后的 Landsat 8 和哨兵 2 号影像 19 个波段反射率为自变量,土壤含水量实测值为因变量进行模型建立和验证。
4 种方法模型建立分析如下:
1)PLSR。最大主成分数设定为 19 个。
2)LS-SVM。采用典型的通用核——径向基函数核,还需要考虑γ,δ22 个参数。正规化参数γ用来权衡模型的预测误差最小化与模型复杂程度的关系,决定 LS-SVM 模型的适用性,径向基核函数参数δ2决定核函数的宽度,这 2 个参数的选择至关重要,在很大程度上决定了 LS-SVM 模型的学习和预测能力。本研究中γ的范围设置为 2-1~ 210,δ2设置为 2~215,最佳γ和δ2采用网格寻优法确定。
3)BPNN。BPNN 采用经典的三层前馈神经网络,包含 1 个输入层,1 个隐藏层(10 个节点)和1 个输出层(1 个节点)。采用 Levenberg-Marquardt算法更新权值,利用偏差的 trainlm 函数对网络进行训练,隐藏层和输出层的传递函数分别为 tansig 和 purelin 函数。学习率设置为 0.01,目标误差设置为0,最大训练纪元数设置为 1 000 个。
4)RF。生成 1 个 RF 模型,需要指定 3 个重要的参数,即森林中的树的数量(ntree),选择生长一棵树的变量的数量(mtry),以及终端节点中变量的最小数量(nodesize),本研究中,这 3 个参数分别设置为 1 000,2,5 个。
由于仅有 17 个采样点,本研究未设立单独的验证集进行模型精度的验证,采用留一交叉验证法对建模结果进行验证。
1.3.2 模型精度评价
在对模型进行精度评价时,采用验证集决定系数R2和均方根误差进行评价。R2越大,均方根误差越小说明预测效果越好。
2 结果与讨论
2.1 土壤含水量与光谱反射率的相关性分析
将 Landsat 8 和哨兵 2 号影像各波段的反射率与土壤含水量进行相关分析,结果如图 1 所示。由图 1 分析可得:土壤含水量与 Landsat 8 影像 7 个波段均呈负相关关系,且与除第 5 波段外的所有波段呈显著负相关关系,与第 1 和 7 波段呈极显著负相关关系;土壤含水量与哨兵 2 号各波段反射率均呈负相关关系。以上结果表明:土壤含水量与 2 个遥感影像源的地表反射率均有很好的相关关系,可为后续反演模型的建立提供理论依据。

图1 土壤含水量与波段反射率的相关关系
分析结果与已有研究结论一致,即土壤含水量与光谱反射率呈负相关关系,因为湿润的土壤在各波段的反射率较低,而同类干燥的土壤在各波段的反射率较高[11],从而呈负相关关系。Landsat 8 的第 1 和 7 波段分别为海岸带监测波段(波长 430~450 nm)和近红外波段(波长为 2 100~2 300 nm),哨兵 2 号的第 1 和 12 波段也分别对应海岸带监测和近红外波段这 2 个波长范围,这几个波段主要用于海岸带环境和旱情监测,因此,均与土壤含水量呈现较好的相关关系,也体现了 2 个数据源的一致性。
2.2 不同建模方法的结果分析与比较
基于 PLSR,LS-SVM,BPNN 和 RF 等不同建模方法的土壤含水量实测值与预测值的散点图如图 2 所示。由图 2 可知:PLSR 方法所得土壤水分实测值与预测值的决定系数R2最高,为 0.996,均方根误差为 0.003 g/g;其次为 RF 方法,R2为 0.660,均方根误差 为 0.030 g/g;LS-SVM 方法建模结果稍差,R2为 0.377,均方根误差为 0.038 g/g;BPNN 方法建模结果最差,R2仅为 0.170,均方根误差为 0.046 g/g。4 种建模方法反演土壤含水量的性能由高到低排序依次为 PLSR,RF,LS-SVM,BPNN,表明 PLSR 建模方法均可精确预测土壤含水量,可能由于 PLSR 是一种线性算法,更适合拟合遥感数据和土壤含水量之间的关系。PLSR 建模方法被证实在预测其他土壤属性方面均有不错的效力[12-13]。
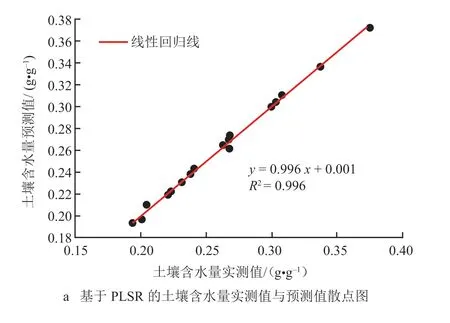

图2 土壤含水量实测值与预测值散点图
2.3 单独建模与融合建模的结果比较
为比较单一遥感数据源与 2 个遥感数据源融合后建模结果的差异,本研究分别用 Landsat 8 和哨兵2 号遥感数据与土壤含水量进行建模研究,建模方法为 PLSR,LS-SVM,BPNN 和 RF,结果如表 1 所示。由表 1 可知:1)基于哨兵 2 号数据的结果整体优于基于 Landsat 8 数据的结果,在 4 种建模方法上均有体现,这可能和哨兵 2 号数据源波段较多有关,可带入的有效信息多,因此,预测土壤含水量的结果更准确。2)PLSR 方法在 2 种数据源上均有较好的表现,为 4 种建模方法中最佳建模方法,体现了该模型的稳定性。3)基于 2 种单独的数据源所得预测结果,体现的 4 种建模方法的优劣顺序和基于融合数据源所得结论一致。

表1 不同遥感数据源结合不同建模方法土壤含水量预测结果
基于单一遥感数据源所得土壤含水量的预测结果,较融合 2 种数据源所得结果稍差,最优结果为哨兵 2 号数据与 PLSR 结合所得结果,R2为 0.915,均方根误差为 0.014 g/g。因为 2 个数据源的结合增加了自变量的个数,带入的有效信息相较于单一数据源要多,所以融合 2 个数据源后,可取得更好的预测结果。
3 结语
本研究以南京金川河流域为例,融合 landsat 8和哨兵 2 号遥感影像,可更好地预测土壤含水量,且该方法同样适用于其他土壤属性的预测。与现有相似研究工作相比,本研究在数据融合处理、算法参数优选方面有一定的创新性,具有较高的实用价值。今后将进一步探讨该方法在其他城市土壤含水量预测上的可用性,为土壤含水量的快速准确获取提供方法依据。
