GPS-RTK结合测深仪应用技术研究
2022-04-27陈文政
陈文政



摘要:文章分别介绍了GPS-RTK和回声探测仪的工作原理,提出采用GPS-RTK与测深仪结合的测量模式构成水深测量系统,并对其在左江大桥河床整平工程中的应用效果进行分析。结果表明,利用GPS-RTK进行坐标及高程定位,使用测深仪进行水深测量,二者相结合实施水下测量工作,提高了水下测量工作的准确度及工作效率,较传统的测量方法有了量的改变和质的飞跃。
关键词:GPS-RTK;测深仪;水深测量;河床整平
中国分类号:U456.3
0引言
测量工作是工程建设的基础,随着科学技术的快速发展和工程建设的需要,测量仪器和测量方法也在不断更新、变化。以往传统的水深测量方法有:全站仪配合测深杆法、测深锤法等,由于这些方法受测站条件、距离、通视、水流强弱等各种条件的限制,测量工作不仅效率低,而且数据精度也不高。传统的水深测量外业工作需要较多专业人员配合,测量时间长、工作强度大,内业数据处理繁琐,耗时长,且人工处理大量数据容易出错,不能及时、正确地指导现场施工。近年来随着GPS-RTK实时定位技术的快速发展,其不仅局限于常规的陆地测量,也能结合相关测量仪器应用于其他领域,其与测深仪的结合,打破了传统水深测量方法耗时、费力、精度低的局限性,较大程度地减轻了野外测量作业人员的劳动强度,更提高了测量内业、外业的工作效率和精度。
1GPS-RTK工作原理简述
GPS-RTK测量技术是建立在载波相位观测基础上的一种实时动态差分相对定位技术,即在两台接收机之间增加一套无线电通信系统,将两台或两台以上相对独立的接收机关联成一个整体,基准站通过电台将观测信息及测站点数据传输到移动站,移动站将接收的与本身观测到的载波信号进行差分处理,从而解算出两站间的基线向量,并根据设置基准站时输入的控制网坐标和投影参数得到移动站的三维坐标数据。GPS-RTK采用广播星历及基准站相对误差改正的误差修正方式,精度可达到厘米级,既达到了测量的高精度,又具有实时动态性。
GPS-RTK测量系统主要包括基准站接收机、电台、移动站接收机。如果施工区域在CORS基站网络服务范围内,那么测量工作开始前就可以运用网络GPS-RTK技术直接[KG(0.1mm]联机,可以省去基准站接收机、电台部分,既减少了测量仪器的投入、省略了基准站的架设,又减少了人力。
2回声测深仪工作原理
如图1所示为测深仪的回声测距原理。Z为换能器到水底的距离,如果声速在水中的传播速度为v,传播时间为t,水深Z=v×t/2,最后的测量结果就等于水深Z加上吃水(吃水是水面到換能器底面的距离)。
3水深测量系统的组成
GPS-RTK和回声测深仪结合系统主要由基准站和移动站构成,基准站由GPS-RTK接收机、电台、数据链构成;移动站由GPS-RTK接收机、测深仪、测量软件及数据链构成。GPS-RTK与测深仪结合系统构成了“GPS-RTK+计算机+测深仪”的测量模式。
GPS-RTK结合测深仪测设水下点位三维坐标的方法,就是将GPS-RTK移动站安装在测深仪换能器的正上方,保证GPS-RTK定位点与水下点在同一条铅垂线上(图2),测量测设点的平面坐标。河底高程则由GPS-RTK所测得高程减去测深仪所测得的待定点的水深,即Hi=H-(h+hp),式中Hi为河底高程,H为水面高程,h为换能器吃水深,hp[WTBZ]为换能器底部到河底的水深。综上所述即可确定测设点的三维坐标。
4.1工程概况
崇左至水口高速公路左江大桥主桥为(77+145+77)m 预应力混凝土连续钢构,主墩为钢筋混凝土薄壁墩,基础采用钻孔灌注桩,其中主墩承台共计4个,全部位于大约20 m的深水中。承台采用无底钢套箱施工,因河床基岩裸露且河床倾斜,钢围堰容易倾斜,封底混凝土容易漏浆,在套箱围堰下沉前需对河床找平,以确保围堰均匀下沉。因深水作业,受水流流速影响,传统的测量方法效率低、难度大,且精度质量难以保证。基于此,决定采用GPS-RTK结合测深仪对河床整平进行施工测量。
4.2测区坐标系统
测区平面坐标系采用1980年北京坐标系,中央子午线107°,坐标分带采用1.5°分带;高程系统采用1985年黄海高程基准。
4.3测区已有资料
测区内采用通过静态观测、四等水准引测的测区内已批复使用的《左江大桥控制网成果》;通过承台已知坐标绘制好的承台位置区域线路图,存储格式为DXF-2004(图3)。
4.4测量仪器配置
采用的测量仪器设备:中海达V30 GPS-RTK两台、中海达HD-310测深仪一套、外接电源一个、测量船只一艘。
4.5外业数据采集
首先在空旷无遮挡处架设GPS-RTK,设置基准站,数据固定后通过网内控制点进行校验,校验无误后连接测深仪,在测深仪坐标与GPS-RTK坐标一致后即可开始工作。在测量船上固定测深仪换能器,精确量取换能器吃水深度并将换能器与测深仪主机连接,接通电源,打开测深仪测量软件,开始设置测深仪吃水深度、声速、串口等确保测深仪正常运行,然后建立坐标库、设置记录间隔、记录限制、记录坐标类型。设置完成后点击“测深”,检查设置的各项数据是否有误、测量数据是否稳定,确认设置数据无误且测量数据稳定后点击“记录”,开始测深并记录数据。为保证在承台范围内采集数据,测深仪可直接调入已绘制好的DXF-2004格式的承台区域线路图,按测深仪显示所在位置指导测量船在承台区域范围内沿规划线路行驶采集数据。
4.6内业数据处理
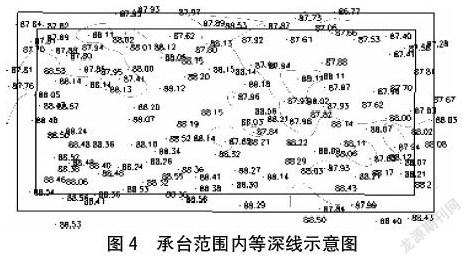
将测深仪记录的数据采集文件导入工作电脑,把经过采样处理的水深文件在数据处理软件中进行格式转换,生成常见的数据XYZ格式或者CASS格式。格式转换成功后,即可拷贝出相应格式的成果文件进行更进一步的绘图处理,然后绘制成图反馈到现场指导施工(图4)。外业测量时由于水中情况复杂,受水草、鱼群等杂物的影响有可能出现干扰波、二次或三次回波,处理数据时应剔除干扰回波数据再进行展点绘图。
5测量注意事项及应对措施
(1)换能器在测量船上安装,一般选择在船的两侧船舷1/3~1/2处。因为装在船头颠簸太大,装在船尾,又会因尾流气泡影响测深回波。换能器吃水要小于船的吃水,因此要防止测量船搁浅或在复杂地形行驶时对换能器造成损坏。
(2)GPS-RTK接收机与测深仪换能器应固定安装在同一竖直面上,且换能器尽量保持垂直,确保GPS-RTK接收的数据与换能器接收的数据相统一。
(3)根据实际水深选择适当声速,确保采集数据的准确性。
(4)注意测深仪“脉宽选择”选项的勾选,大多数情况下水底面回波脉冲宽度是最大的而干扰信号和二次、三次回波脉冲宽度相对要小,该选项有助于处理数据时剔除干扰信号及二次、三次回波数据。
(5)测深仪调入计划区域线路图后,严禁修改坐标系统、转换参数防止出现坐标错误,如需修改可以新建任务。
(6)测深仪记录格式设置时必须选择经纬度,如选择直角坐标可能会在后期处理中无法识别正确的位置信息。
(7)测量前后都需要对已知点进行校验,保证所采集的测量数据准确,并在测深仪测量前后,对测深数据进行校验,保证水深测量数据的正确性。
(8)GPS-RTK基准站要求架设在偏高且空旷的场地,不宜远离测区;接收机上方无遮擋,远离高压线、通信塔等干扰源,以保证GPS-RTK移动站实时达到固定解。
(9)准备充足电量的外接电源,测量过程中不能突然断电,防止损坏测量仪器或导致测量数据丢失。
6结语
与传统水深测量模式相比,GPS-RTK结合回声测深仪测量系统具有明显的优势:
(1)测量作业速度快、数据精度高、误差小、数据间距整齐。
(2)三维坐标采集一次完成,不受气温、通视、距离等条件的局限,可随时作业。
(3)自动化程度高,从测量数据采集、存储到内业数据处理、成图基本都由仪器软件自动完成,规避了人工处理大量数据的繁琐及计算出错、数据丢失的风险。
(4)测量技术的不断更新减少了测量作业人员数量,降低了测量外业工作强度,改变了作业环境,从而减少了费用支出,带动了水下测量进入了数字化时代。
(5)随着科学技术的不断更新、发展,多种类测量仪器实施联合测量将有更加广阔的发展前景。
参考文献:
[1]杨慧,武宜壮.GPS-RTK结合测深仪在水下地形测量中的应用[J].科技传播,2012(8):145,159.
[2]李况铎.GPS-RTK结合测深仪测量的时间延迟测定[J].科技创业家,2012(17):9-10.
[3]宋长军.GPS-RTK与边角交会相结合测图根控制[J].科技经济市场,2010(11):22-23.
[4]张喜宏.GPS-RTK在地质测绘中的应用和探讨[J].科学技术创新,2017(23):91-92.
[5]龙晶.GPS-RTK与全站仪联合作业在数字测图中的应用[J].住宅与房地产,2017(17):248.
