基于S-G滤波与包络提取算法的半导体激光器自混合干涉微位移测量
2022-04-26李思嘉熊玲玲马训鸣
李思嘉,刘 晖,熊玲玲,马训鸣
(1.西安工程大学机电工程学院,陕西 西安 710048;2.西安市现代智能纺织装备重点实验室,陕西 西安 710048)
0 引言
近年来,激光自混合干涉(SMI)技术能够实现非接触且无损伤的精密测量,而且分辨率高,精度可达微米量级,在众多测量领域受到了青睐[1]。在此基础上,激光自混合干涉技术还被应用于微小范围内的速度[2]、位移[3]、振动[4]和绝对距离[5]等物体运动规律测量中。SMI系统和传统双光束干涉系统相比,具有简单紧凑、易准直和动态响应快的优点[6-7]。
由于自混合干涉信号会携带外部目标体的运动信息,因此,干涉信号的完整性和可辨识性对于振动位移测量的准确性尤为重要。在实际测量过程中由于噪声或者被测物表面不光滑等干扰因素,导致测量出的信号在干涉条纹和位移方向跳变点处存在杂峰,影响测量的准确性。张宝峰等[8]为了消除噪声对自混合干涉角度测量的影响,使用变分模态分解(VMD)算法对信号中的高频和低频噪声进行滤波,进而利用希尔伯特(Hilbert)算法提取信号的包络。Usman等[9]采用低通滤波器处理SMI信号中的噪声,并利用局部极值包络法提取包络线。上述方法,在使用Hilbert算法提取信号包络时,当信号信噪比变小时,包络误差会随之增大,导致提取的信号包络线不光滑,造成提取误差;局部极值法提取的包络线在相邻峰值点处不能完全拟合。在位移测量过程中,高精度识别SMI信号的条纹信息仍然存在极大的挑战。
本文提出一种基于S-G滤波与包络提取算法的半导体SMI信号处理算法,对存在噪声干扰现象的SMI信号进行滤波处理、包络分析并归一化处理。首先使用基于最小二乘法的卷积平滑Savitzky-Golay(S-G)算法对原始信号进行均值滤波处理,再利用三次样条函数插值算法计算包络曲线,最后对信号进行归一化处理。为验证算法的正确性,采用不同调制幅值下的压电陶瓷(PZT)作为模拟振动源,实验采集该模拟振动源下的SMI信号,并获取1个干涉周期内的微位移信息。结果表明:使用该算法进行SMI信号处理并识别条纹后,通过对条纹数与压电陶瓷调制幅值进行拟合,压电陶瓷调制幅值与SMI条纹数呈线性关系,验证了此算法在微米量级微位移测量的准确性。
1 激光自混合干涉实验装置
SMI微振动测量实验系统如图1所示。该系统包含模拟振动源、光束传输和数据采集3个模块。选用波长为635 nm的半导激光器作为光源,发射出的光被压电陶瓷(PZT)反射,使用压电控制器(Thorlabs KPZ101)驱动PZT产生微位移ΔLext,激光二极管控制器(Thorlabs LDC205C)驱动电流用于设置半导体激光器工作电流,机械平移台用于调节外腔长度,本实验外腔长度设置为124 mm。SMI信号经过电流—电压电路转换并放大,由数据采集卡(NI USB-6341)进行数据采集,最终在计算机上实时显示SMI信号波形。
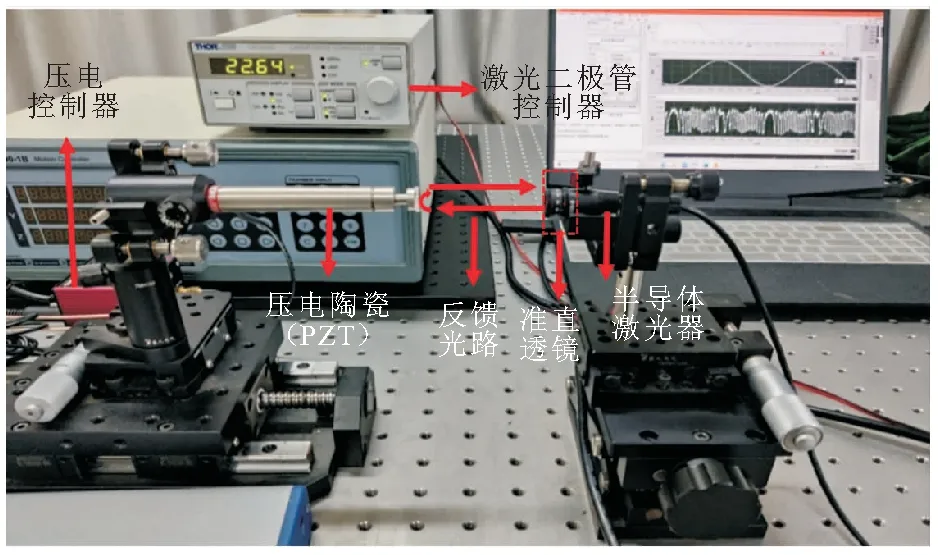
图1 激光自混合干涉实验装置
2 信号处理过程分析
2.1 信号处理流程
整体信号处理过程包括以下3个部分。
a.信号预处理:包括信号采集和S-G卷积均值滤波。信号预处理的作用是将有用的信号与噪声分离,提高信号的信噪比。
b.包络分析:对滤波后的SMI信号使用寻峰算法获得波峰和波谷的极大值点,利用三次样条函数插值算法进行包络点计算,进而用波包算法绘制包络线。
c.归一化处理:通过计算获得零交叉信号,进而对信号进行归一化处理。
整个信号处理流程如图2所示。
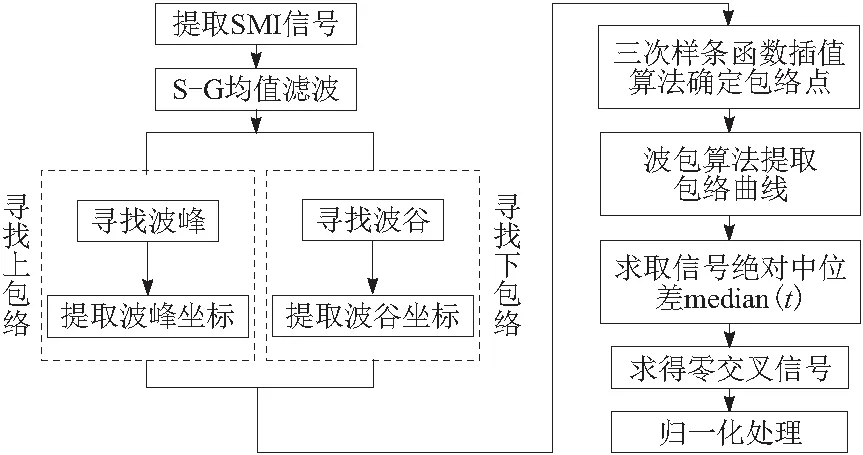
图2 信号处理流程
2.2 信号预处理
原始采样的SMI信号伴随有大量的随机噪声,在反馈光相位跳变点处还存在明显的高频扰动,这需要对干涉信号进行均值滤波,消除噪声和图像上的失真。
2.2.1 S-G均值平滑滤波
针对SMI微振动信号特征提取被高频噪声干扰问题,SMI原始信号需要先进行滤波处理使信号平坦化以进行下一步的包络分析。本文采用基于最小二乘法拟合的S-G均值滤波算法处理SMI时域信号,此方法用拟合值替换原始数值,以达到去除高频噪声点,平滑原数据序列的作用。
S-G算法提取自混合干涉信号中任意时域点xi两侧各n个数据点,nl和nr分别为xi左边点和右边点的个数。即构造1个以xi为中心包含2n+1个数据点的M阶多项式pi(x),光滑数值gi为多项式pi(x)在xi的值,即
(1)
xi为自混合干涉信号任意时域点坐标;Δx为xi+1与xi之间的均匀间距;k为阶数;bk为系数。
假设任意时域点xi具有xi+1-xi=Δx的均匀间距,SMI信号幅值为yi,基于局域多项式最小二乘拟合法用pi(x)拟合原始SMI信号,确定拟合系数bk,使得式(2)达到最优[10-11],即
(2)
yj为SMI信号幅值;pi(xj)为拟合值。
算法可分为以下3部分。
a.确定窗宽:选择任意时域点两侧各n个数据点构成滤波窗口。对窗口中的数据做多项式最小二乘拟合,得到其平滑数值。
b.确定阶数M:阶数M决定滤波曲线的线性失真率,根据选择的窗口宽度与拟合阶数M,求解拟合曲线。
c.求取拟合系数bk:将拟合曲线的值作为滤波后的数据值,确定最优拟合系数bk。
依据SMI信号在相位跳变点处噪声干扰大的特点,通过对多组实验采集的数据采用不同S-G算法参数处理后的综合比较。在满足失真率不高,平滑曲线完整,选择窗口宽度nl=nr=10、阶数M=2的滤波参数,应用此算法,对SMI信号进行滤波,经过滤波后的波形如图3b所示,图3b中序号①②③④分别为SMI信号不同时刻的相位跳变点,观察图3b滤波后的波形,相位跳变点和条纹中的高频噪声被滤除,曲线平滑度得到提升,进一步说明了此滤波算法的可行性。

图3 SMI信号滤波处理前后波形图
2.3 包络分析
包络分析包含2个过程,分别是条纹寻峰和包络提取。
a.条纹寻峰:由于SMI信号幅值大小不一,在包络提取前需要寻找波峰来确定单一干涉条纹的信息以及峰值幅度。选取以下参数作为寻峰算法的运行条件:设定最小峰值高度标记所要寻找的幅值范围、设定相邻两峰间隔数避免重复寻峰、对时域和幅值坐标进行数值限制。如图4所示为SMI信号滤波后的寻峰结果,其中的每个和★分别代表波峰和波谷的峰值数据点。
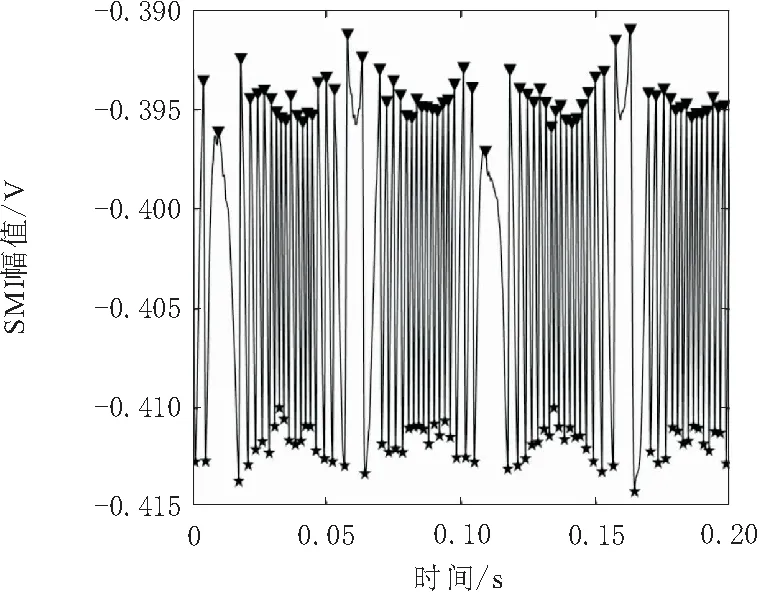
图4 条纹寻峰SMI波形图
b.包络提取:对比分段插值法的光滑性较差、精度不高的缺陷。为了提高条纹计数的精度,使用三次样条函数插值法进行包络线拟合,分别以信号的寻峰和寻谷数据点作为信号的上包络线和下包络线的插值节点。
三次样条插值算法具体流程为:
假设有n+1个数据节点(x0,y0),(x1,y1),(x2,y2),…,(xn,yn)。
a.计算步长hi=xi+1-xi,i=0,1,…,n-1,确定相邻时域点的间隔。
b.将n+1个数据节点和端点a和b代入矩阵方程。
c.得矩阵方程,求得二次微分值mi,确定信号的拐点。
d.计算样条曲线的系数,如表1所示。
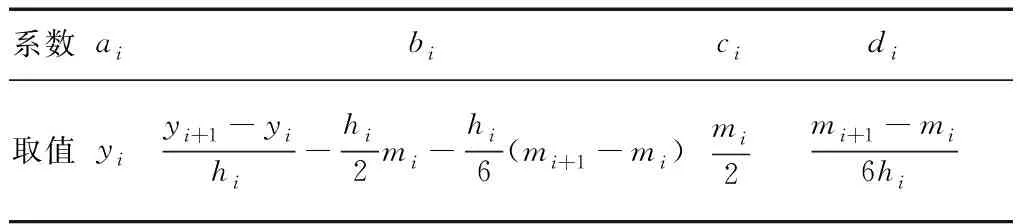
表1 样条曲线系数取值
表1中,i=1,2,3,…,n-1;yi为任意幅值;hi为步长;mi为二次微分值。
e.三次样条函数s(x)在每个子区间[xn-1,xn]上可由4个系数唯一确定。因此,s(x)在[a,b]上有4n个待定系数。由于s(x)∈C2[a,b],在每个子区间xi≤x≤xi+1中,创建方程[12],即
si(x)=ai+bi(x-xi)+ci(x-xi)2+
di(x-xi)3
(3)
si(x)为每个子区间幅值信号的包络线函数;ai、bi、ci、di为系数。
将得到的包络线函数si(x)的数值利用波包算法绘制包络谱线,如图5所示为包络分析后的SMI信号。从图5中可以看出,用虚线标注的上、下包络曲线紧贴每个干涉条纹的最大值点。
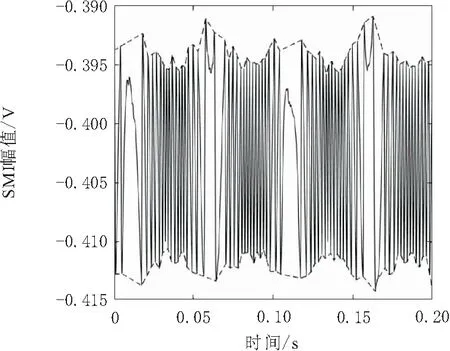
图5 利用插值法求SMI包络图
2.4 归一化处理
信号归一化包含2个过程,分别是零交叉信号计算和信号归一化处理。
在实验当中得到的SMI信号,由于测量噪声影响在正负幅值区间不能均匀分布,直接条纹寻峰,会导致条纹计数误差。为了提高归一化处理后条纹计数时寻峰的准确性,将进行以下处理。
a.零交叉信号计算。
在求得上下包络线之后,根据上下包络线对应各个点的坐标值可以获得上下包络线P1(t)的绝对中位差median(t),即
median(t)=max(t)-[max(t)-min(t)]/2
(4)
根据原始信号减去低频信号即为高频信号,可以获得零交叉SMI信号P2(t),即
P2(t)=P1(t)-median(t)
(5)
max(t)为P1(t)上包络线的局部最大值;min(t)为P1(t)下包络线的局部最小值;P2(t)为零交叉的SMI信号。如图6所示,可以看出上、下包络线所覆盖的区域关于坐标零点峰域正负均匀分布,信号波动范围从-0.1~0.1 mV。
b.信号归一化处理。
如果用SMI干涉理论模型表示归一化过程,可以表示为[13]
(6)
G(φF(t))为干涉函数;P(φF(t))和P(φ0(t))分别为有光反馈和无光反馈的激光器功率;m为调制系数,表示光强信号受到反馈光的影响程度。
依据式(6)处理,得到归一化的SMI信号G(φF(t)),归一化处理保证整个信号的幅值在[-1,1]之间变化,使得条纹计数的误差更小。如图7所示为归一化处理后的SMI信号,可以看到相邻条纹之间均匀分布,克服了因为噪声影响所导致的波动现象,为位移测量精确性提供保障。

图6 过零处理后的SMI信号
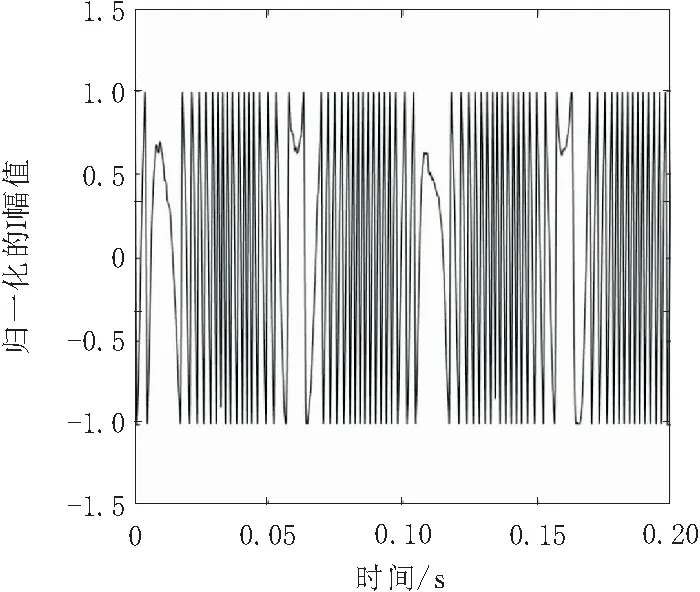
图7 经过归一化处理的SMI信号
3 算法验证
3.1 实验设计
实验设计基于如图2所示SMI微振动测量系统。通过对压电控制器设定不同的驱动电压幅值,使得PZT按照式(7)模拟正弦运动,即
D(t)=KVPZTsin2πft
(7)
D(t)为PZT位移;K为系统参数(取值为常数);VPZT为调制电压;f为调制电压频率。
利用条纹计数法得到SMI信号处理前后PZT的振动位移。在条纹计数法中,自混合干涉信号每产生1个完整的干涉条纹,对应被测物体的半波长位移,具体为[14]
(8)
D(t)为振动位移;n为条纹数目;λ为激光器的波长。
实验如表2所示中不同方案设置压电控制器调制电压幅值、调制频率,并采集相应数据。
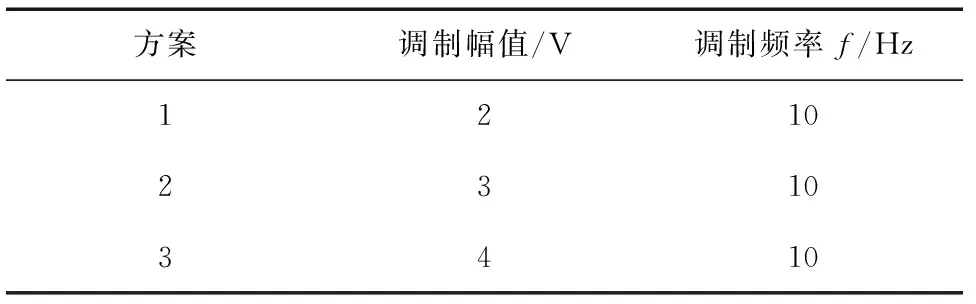
表2 不同方案下的压电控制器调制幅值、频率
3.2 实验结果
如图8~图10所示分别为调制频率为10 Hz,调制幅值分别为2 V、3 V、4 V下驱动PZT模拟正弦运动采集到的相应SMI信号。其中图8~图10中黑实线为SMI信号,虚线为正弦调制电压波形。
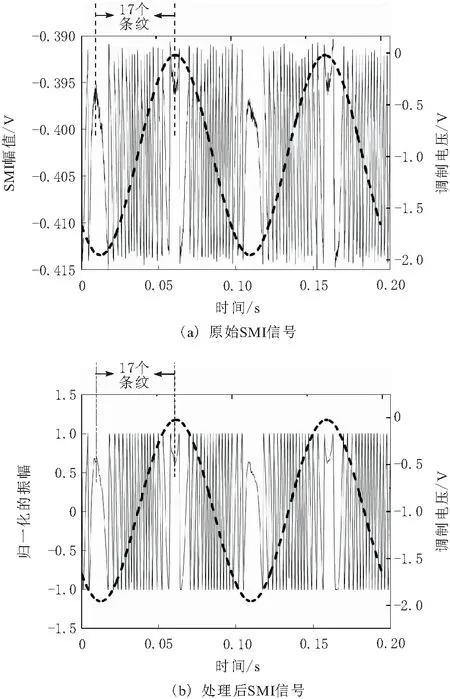
图8 采用方案1的数据处理前后波形图

图9 采用方案2的数据处理前后波形图
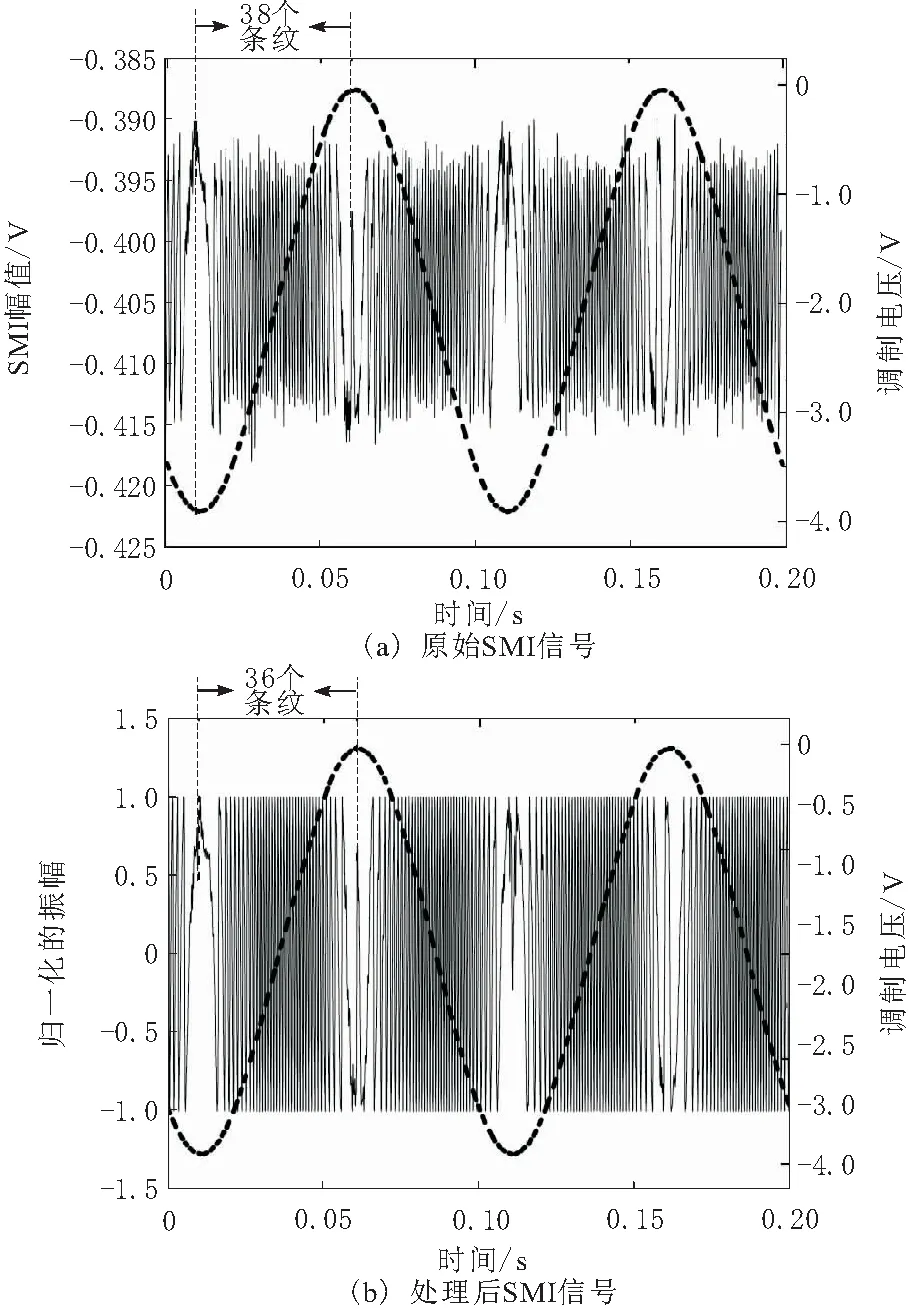
图10 采用方案3的数据处理前后波形图
如图8~图10所示,在方案1至方案3中SMI信号处理前条纹数依次为17、31、38,处理后的条纹数依次为17、27、36。可以发现方案1 SMI信号处理前后,整周期内的SMI条纹数量没有变化,均为17个;在方案2和方案3中,由于PZT驱动电压幅值的增大和测量噪声的影响,使得SMI条纹数增多,信号处理前后得到的条纹数不一致。观察归一化后的SMI信号,波形中已经没有杂峰和噪声高频信号出现,条纹清晰度得到很大提升,可以实现利用条纹计数法精确计算PZT的振动位移量。
3.3 实验分析
在SMI信号中,每1个波峰到波谷的曲线,意味着自混合干涉信号1个整数条纹周期。分别对3组方案所采集到的条纹数,利用条纹计数法计算其微位移,并求出信号处理前后条纹数量的误差率。3组方案的具体数据如表3所示。
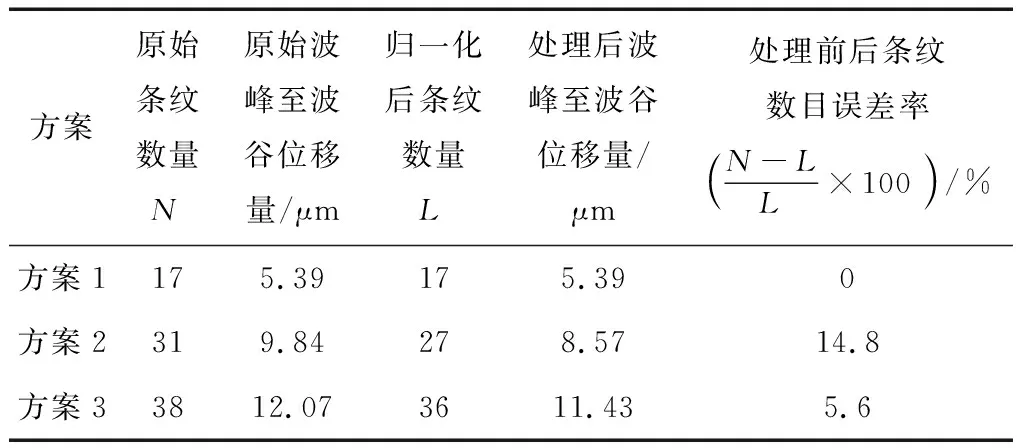
表3 3组实验信号处理前后条纹和位移变化
通过观察表3中方案2和方案3,可以发现升高调制电压使得PZT振幅增大,SMI的条纹数增多。在方案2中,选取0.01~0.06 s的1个整周期寻峰数据,从图11a中可以看出原始信号中因为高频噪声会出现多峰现象[15],造成条纹计数误差;图11b在进行信号处理之后,可以准确地得到条纹数,并进行位移计算。
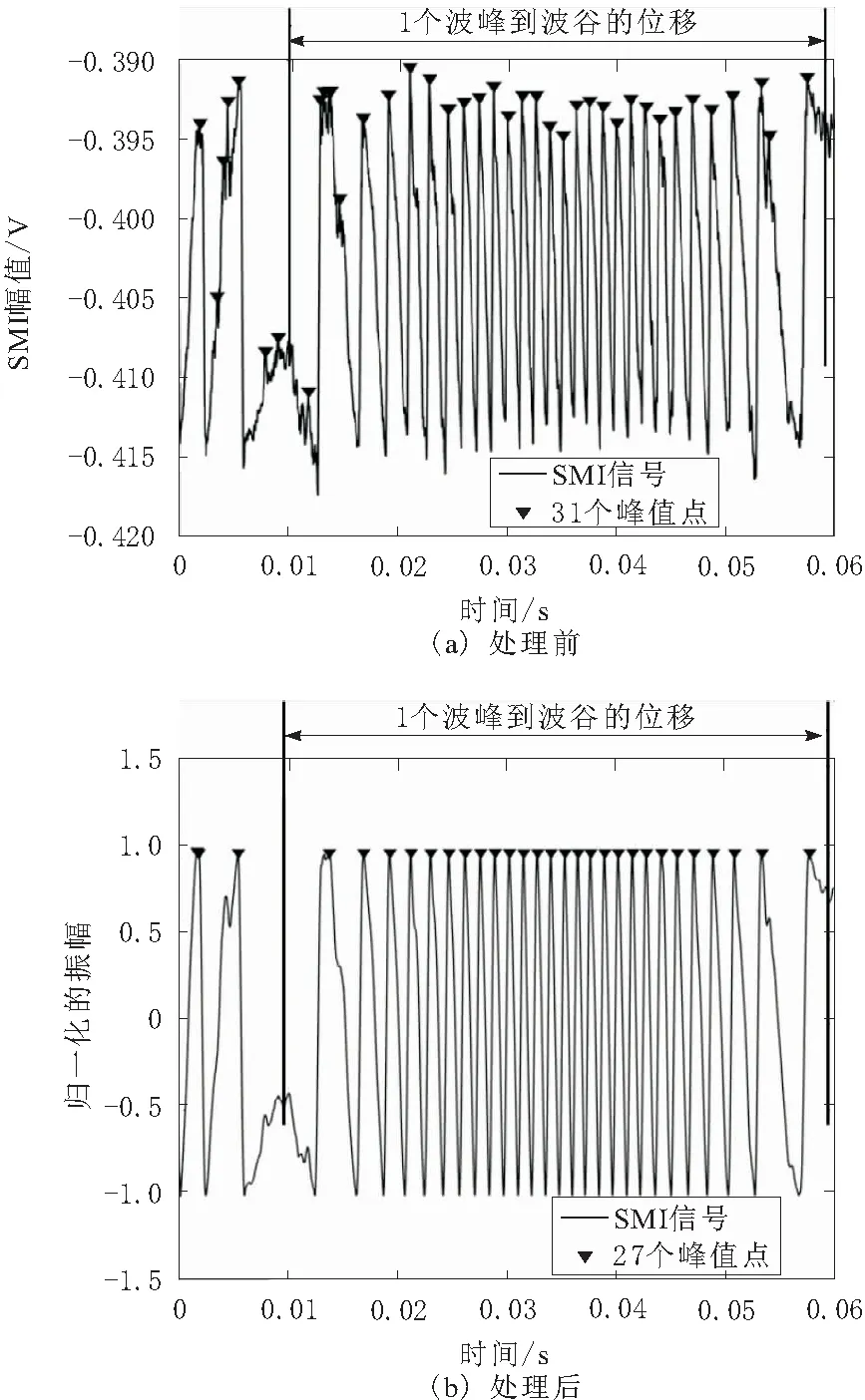
图11 SMI信号1个干涉周期内寻峰数目变化
3.4 实验总结
将实验得到的3组SMI信号处理前后的条纹数,用线性拟合的数学运算求出信号处理后的条纹数拟合曲线,如图12中虚线所示。其中,信号处理前条纹数分别为17、31、38;信号处理后条纹数分别为17、27、36。
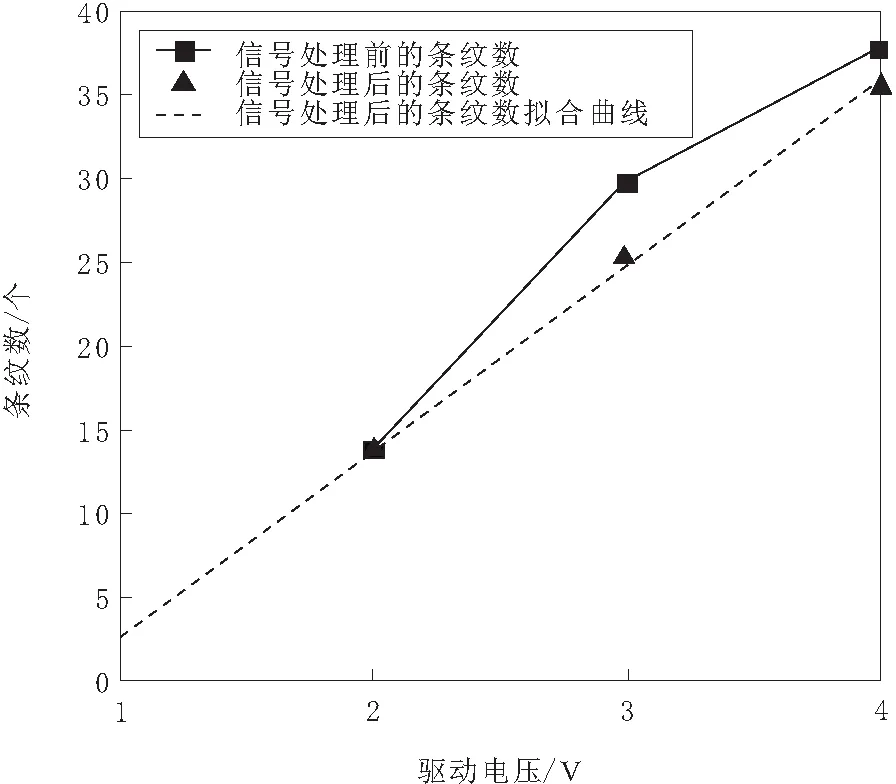
图12 信号处理前后压电陶瓷驱动幅值与SMI条纹数
理论上PZT振动的位移量与调制电压幅值呈线性关系,由图12可以看出,信号处理前的SMI信号条纹数与PZT调制电压幅值的曲线并不在拟合的直线上,证明由于噪声影响,测量结果存在一定的偏差;信号处理后的PZT调制电压幅值与SMI信号条纹数呈现线性关系,可以证明该信号处理算法是有效并正确的。
4 结束语
针对SMI中激光功率波形出现的因为测量环境引起的条纹噪声,本文提出一种半导体激光器自混合干涉信号滤波和包络处理算法,该算法可以有效减少因噪声造成的干涉条纹数目读取误差,精确提取SMI信号波形特征。通过对3组不同PZT调制电压幅值下的SMI信号进行算法准确性验证,实验结果表明,信号处理后的PZT调制电压幅值与SMI条纹数呈现线性关系,采用基于S-G滤波与包络提取算法,可实现半导体激光器自混合干涉微位移测量的准确性。