船舶混合动力系统模式切换与动态协调控制
2022-04-26宋恩哲孙晓军姚崇刘治江
宋恩哲, 孙晓军, 姚崇, 刘治江
(哈尔滨工程大学 动力与能源工程学院,黑龙江 哈尔滨 150001)
节能环保的呼声日益增强,船舶能效法规日益严格。随着船舶能效设计指数标准第2、3阶段实施日期的逼近,船企面临着巨大的技术挑战[1-2]。针对目前船舶业面临难题,开发新型动力系统与智能控制策略是实现船舶业可持续发展的重要战略[3];《船舶工业深化结构调整加快转型升级行动计划(2016-2020年)》中明确要求绿色环保主流船舶、高技术船舶作为船舶发展重点研究方向[4]。混合动力船舶是多动力源系统,通过多种动力源的特性互补,可以实现整体系统性能的提升和改善[5]。混合动力主要分为电力混合推进系统、柴电混合推进系统、气电混合推进系统、新能源混合推进系统[6-9]。船舶气电混合动力技术采用天然气发动机和电机作为混合动力源,可减少15%~20%的CO2排放量、80%的NOx排放量、100%的硫化物和颗粒排放,可以实现船舶动力的超低排放要求,并且电机的瞬态快速响应特性能够弥补单独使用天然气发动机时动力性较差、动态响应较慢的缺陷[10-11]。目前对柴电混合动力系统以及控制策略进行了研究[12-14],对气电混合动力系统的研究发展较少且主要集中在能效计算[8]、节能减排等理论分析方面[15],对于混合动力系统推进模式的科学分类和能量管理控制策略的研究还不够深入。对于船舶气电混合动力系统切换控制策略是实现最优性能的关键技术,是能量管理系统的核心组成,策略设计的完善程度直接决定整系统的经济性、动力性和排放性[16-17]。
本文针对气电混合动力系统中设备的工作特性进行模式切换条件研究,基于逻辑门限建立切换控制策略。对切换控制策略进行仿真研究分析提出该策略的不足,再针对性利用动态协调算法展开研究分析,并且对2种方式性能进行对比分析。
1 船舶气电混合动力推进系统
1.1 系统总体架构
船舶气电混合动力系统连接方式如图1所示,系统动力源主要包括天然气发动机、可逆电机、储能系统;设备参数如表1所示。
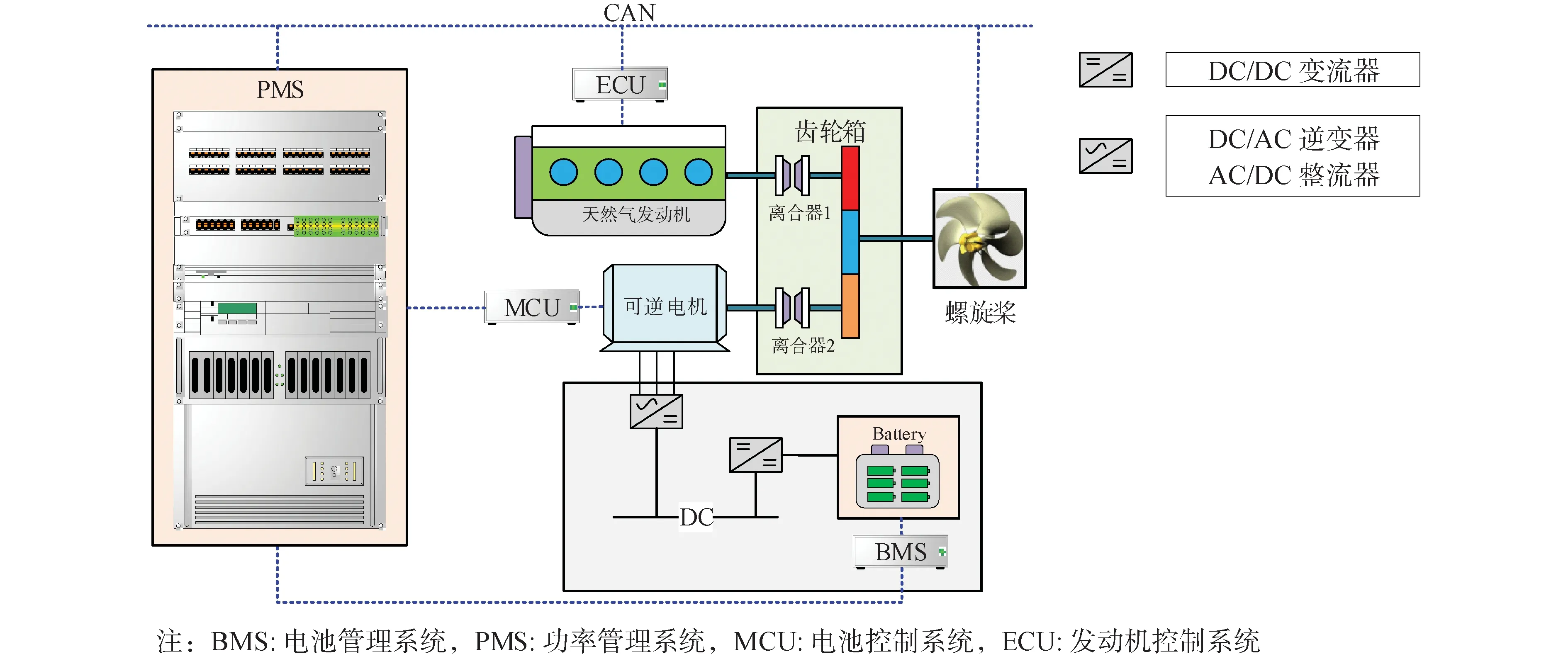
图1 混合动力推进系统拓扑图
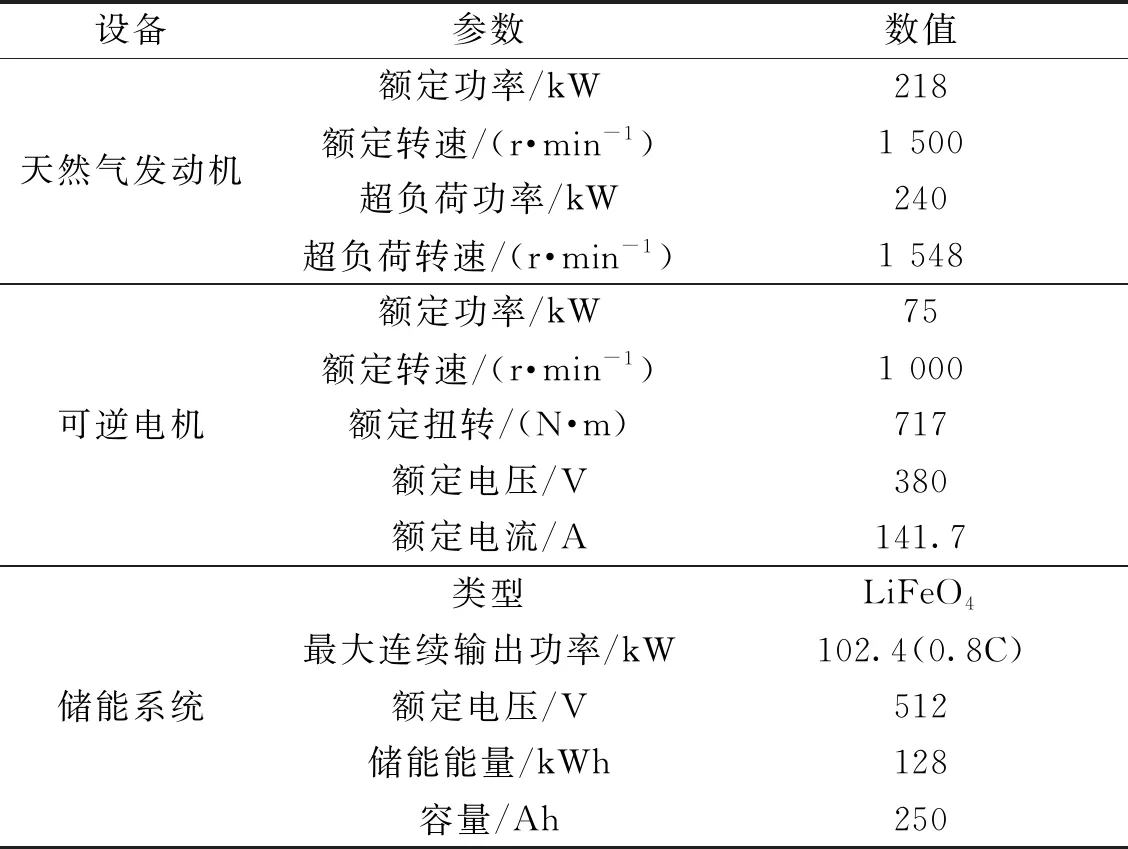
表1 混合动力系统设备参数表
1.2 推进系统模式分类
根据《混合动力船舶检验指南》中提出的相关规范将船舶气电混合动力系统运行模式分为4个模式:机械推进模式MP、储能电力推进模式PTH、主机推进充电模式PTO、混合推进模式Boost:
1)机械推进模式。
该模式下系统离合器1接排,仅天然气发动机处于工作状态,电机只在系统需求功率发生变化时工作,用于弥补天然气发动机的动态响应,在进入稳定工况后,电机不工作,由天然气发动机单独驱动螺旋桨。此时船舶推进功率属于中高负荷且蓄电池荷电状态(state of charge,SOC)状态处于高效区。
2)储能电力推进模式。
该模式下离合器2接排,可逆电机处于电动机状态,在储能电力推进模式,天然气发动机不工作,通过蓄电池组向电动机供电,单独驱动螺旋桨。该模式下船舶推进功率需求较低且航行在对排放和噪声有较高要求的区域。
3)主机推进充电模式。
该模式下离合器1和2均接排,可逆电机处于发电机状态,天然气发动机和发电机都处于工作状态,由天然气发动机单独驱动螺旋桨,同时利用剩余功率通过发电机为蓄电池组充电。在该模式下当系统需求功率较低时可以改变发动机的工况点;当SOC较低时可以对蓄电池进行充电;适用于船舶推进功率需求中等或较低且SOC状态较低的情况。
4)混合推进模式。
该模式离合器1和2均接排,可逆电机处于电动机状态,天然气发动机和电动机都处于工作状态,此时系统需求功率在天然气发动机的外特性曲线之外,天然气发动机无法满足系统需求功率,多余功率由电动机弥补,同时电动机也弥补天然气发动机系统的动态响应。适用于船舶推进功率需求很高且航行在对排放和噪声要求不高的区域。
2 切换控制策略
切换控制策略将涉及到总需求功率、发动机和电动机目标转速、转矩等多种控制信号输出。因此,切换控制策略必须识别出总功率需求,并根据发动机、电动机和电池等部件目前工作状态合理确定发动机和电动机的目标转速和扭矩。切换控制策略由4部分组成。
2.1 需求功率识别
需求功率指的是为保持螺旋桨转速不变的情况下,动力系统需要向螺旋桨输入的功率,主要包含发动机功率输入端和电动机功率输入端2个方面。在稳定运行工况下,螺旋桨工作在螺旋桨推进特性曲线上,当用多动力源(发动机和可逆电机)驱动螺旋桨时,螺旋桨要保持输入功率和输出功率的一致;此时,混合动力系统经过齿轮箱输出的转速与螺旋桨的转速成比例关系;混合动力系统的功率等于螺旋桨吸收的功率。通常螺旋桨需要的功率与转速的三次方成比例。输出功率与转速按照船机推进特性工况(E3)试验循环进行计算[18-19]。
2.2 确定模式间切换条件
天然气发动机是船舶气电混合动力系统的主要动力源,因此要着重确定天然气发动机的低负荷运行边界条件。天然气发动机类型众多关于低负荷边界并无某明确的计算方法和法规标准,对于不同结构的动力系统而言,低负荷低效率区范围都不相同,而对图1所示的船舶并联式气电混合动力系统而言,发动机低负荷低效率区即为当系统机械推进效率小于储能电力推进效率时的发动机工作区,因此天然气发动机低负荷低效率区最大转矩线为当机械推进效率与储能电力推进效率相等时发动机效率所对应的输出转矩,该转矩称为等效低负荷扭矩。
机械推进效率与储能电力推进效率分别为[15]:
ηMP=ηeηclηgbηprop
(1)
ηPTH=ηb,avgηbηpcηmηclηgbηprop
(2)
式中:ηMP为机械推进效率;ηPTH为储能电力推进效率;ηe为发动机效率;ηb,avg为蓄电池平均储能效率,41.87%[19];ηb为蓄电池平均放电效率,94%;ηpc为电力转换装置效率,95%;ηm为电动机效率,90%;ηgb为齿轮箱运行效率,98%;ηcl为离合器效率,99.9%[8]。
由式(1)和(2)可知,机械推进效率与储能电力推进模式下效率相等时发动机效率为:
ηe=ηb,avgηbηpcηm
(3)
通过式(3)可得发动机效率为33.6%;图2给出通过试验测得推进特性下的发动机工作效率,根据图2可知发动机效率为33.6%对应的转速、扭矩分别为1 004 r/min和618 N·m,此时系统负荷为30%。因此当天然气发动机负荷低于30% 时系统处于低负荷低效率区,为储能电力推进模式、混合推进模式的分界点。
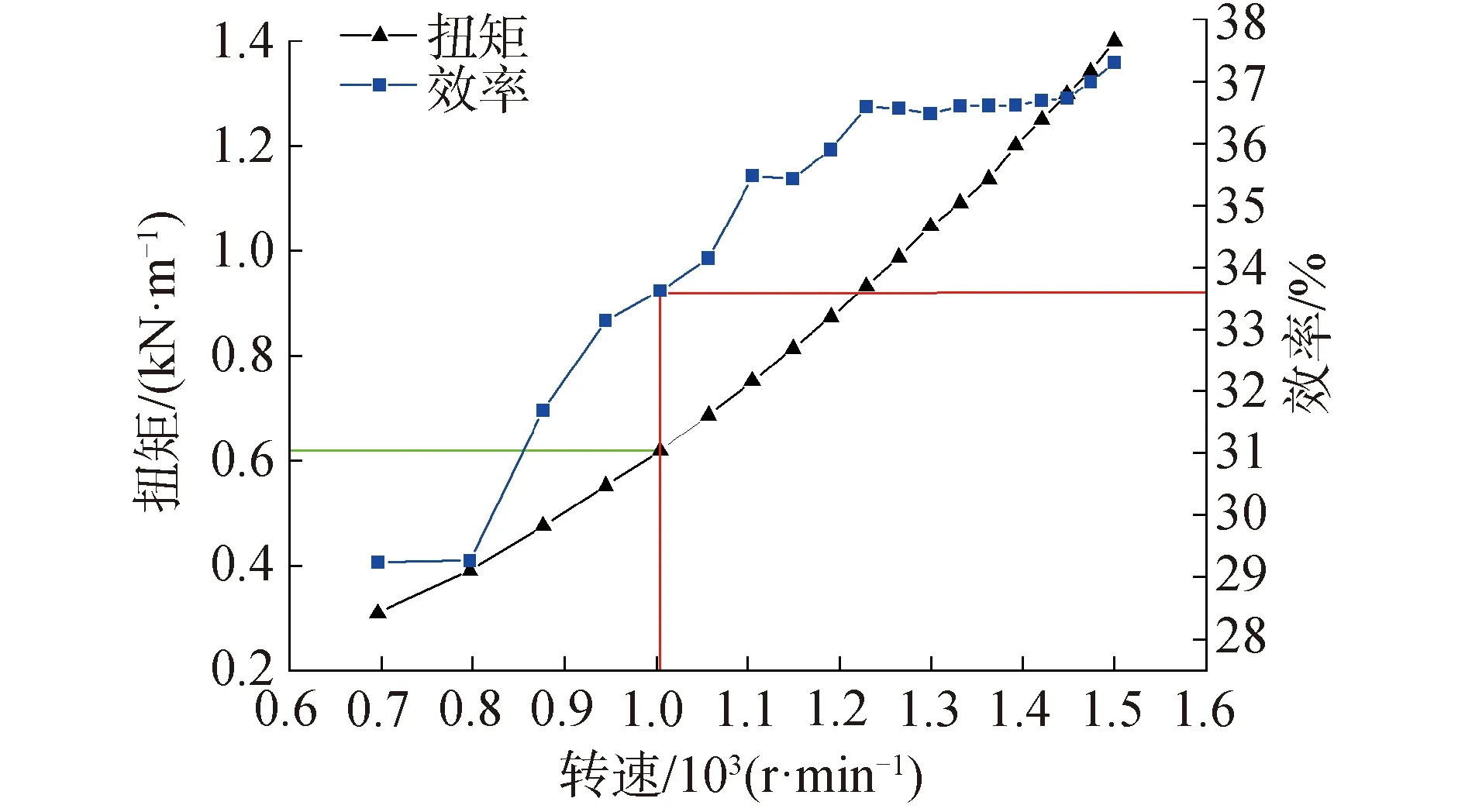
图2 发动机推进特性曲线
观察图3可知,天然气发动机的工作效率为33.6%(对应图2中30%等效低负荷曲线),此时对应的工况为转速1 004 r/min、扭矩618 N·m,即A点,此时对应的是30%负荷(额定功率为218 kW),图中AC线为天然气发动机效率为33.6%等效率曲线;30%等效低负荷曲线与293 kW(混合动力系统)推进特性曲线的交点为B,此时转速和扭矩分别为878 r/min和638 N·m,成为机械推进模式和储能电力推进模式的分界点;D点为219 kW推进特性曲线与218 kW外特性曲线的交点,此时转速和扭矩分别为1 299 r/min和1 400 N·m,成为机械推进模式和混合推进模式的分界点;30%等效低负荷曲线与293 kW推进特性曲线的交点为C,此时转速和扭矩分别为700 r/min和693 N·m,此时B、C、D点成为机械推进模式、储能电力推进模式。
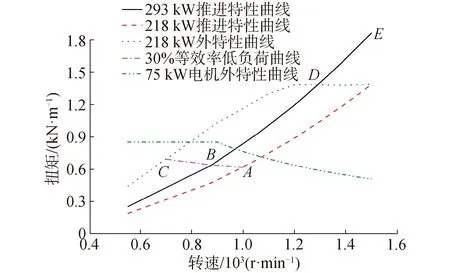
图3 特性曲线汇总
根据表1所选蓄电池的类型确定电池SOC的边界条件,如图4所示[20];磷酸铁锂电池开路电压OCV-SOC的关系是非线性的,OCV在SOC小于20%和大于80%时相对于SOC的灵敏度很高,即SOC发生微小的变化都会引起OCV较大的变化,如果在这种情况下给电动机提供电能,将使电动机两端的电压不稳定,降低电动机运行的稳定性和安全性,而在SOC处于20%~80%的OVC曲线比较平坦,可以保持较平稳的充放电,为电机工作提供良好运行环境。考虑到蓄电池的平稳充放电和效率,并为蓄电池留有一定的放电和充电裕度,蓄电池SOC确定的工作确定为40%~80%[21]。
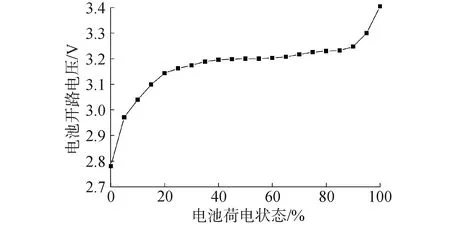
图4 磷酸铁锂电池的 OCV-SOC 曲线
船舶并联气电混合动力系统通过加入电机来实现改变天然气发动机运行工况工作点和提高响应速度。根据系统需求负荷和蓄电池SOC状态将其混合动力系统进行模式状态划分,改变天然气发动机工作状态,有效改善天然气发动机低负荷下效率低下、排放恶化的问题,同时可以确保天然气发动机较长时间工作在高效率中等负荷区。根据上述切换条件,不同运行模式的约束条件如表2所示,图5更加直观的反映状态分类的分界线。
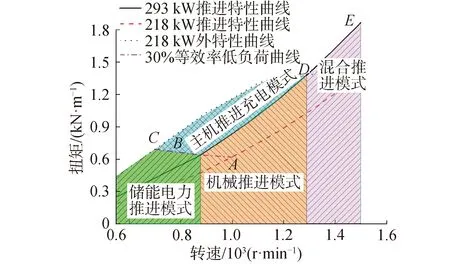
图5 模式状态曲线

表2 系统工作模式划分与约束条件
2.3 功率分配
功率分配模块主要实现发动机和电动机目标功率的分配;发动机的目标功率Pe_target是根据总需求功率和状态模式确定的,具体发动机目标功率为:
(4)
电动机目标功率Pm_target则由总需求功率与发动机目标功率计算获得,如果Pm_target为负值表示处于发电机状态,天然气发动机多余能量通过发电机为蓄电池充电。电动机目标功率Pm_target为:
(5)
式中:Te_eff_min(n)和Te_max(n)为天然气发动机等效低负荷扭矩和外特性扭矩,N·m;n为齿轮箱输出转速,r/min。
综合需求功率、切换条件以及发动机和电机目标功率,得到如图6所示的切换控制策略确定发动机、电动机目标功率的示意图。
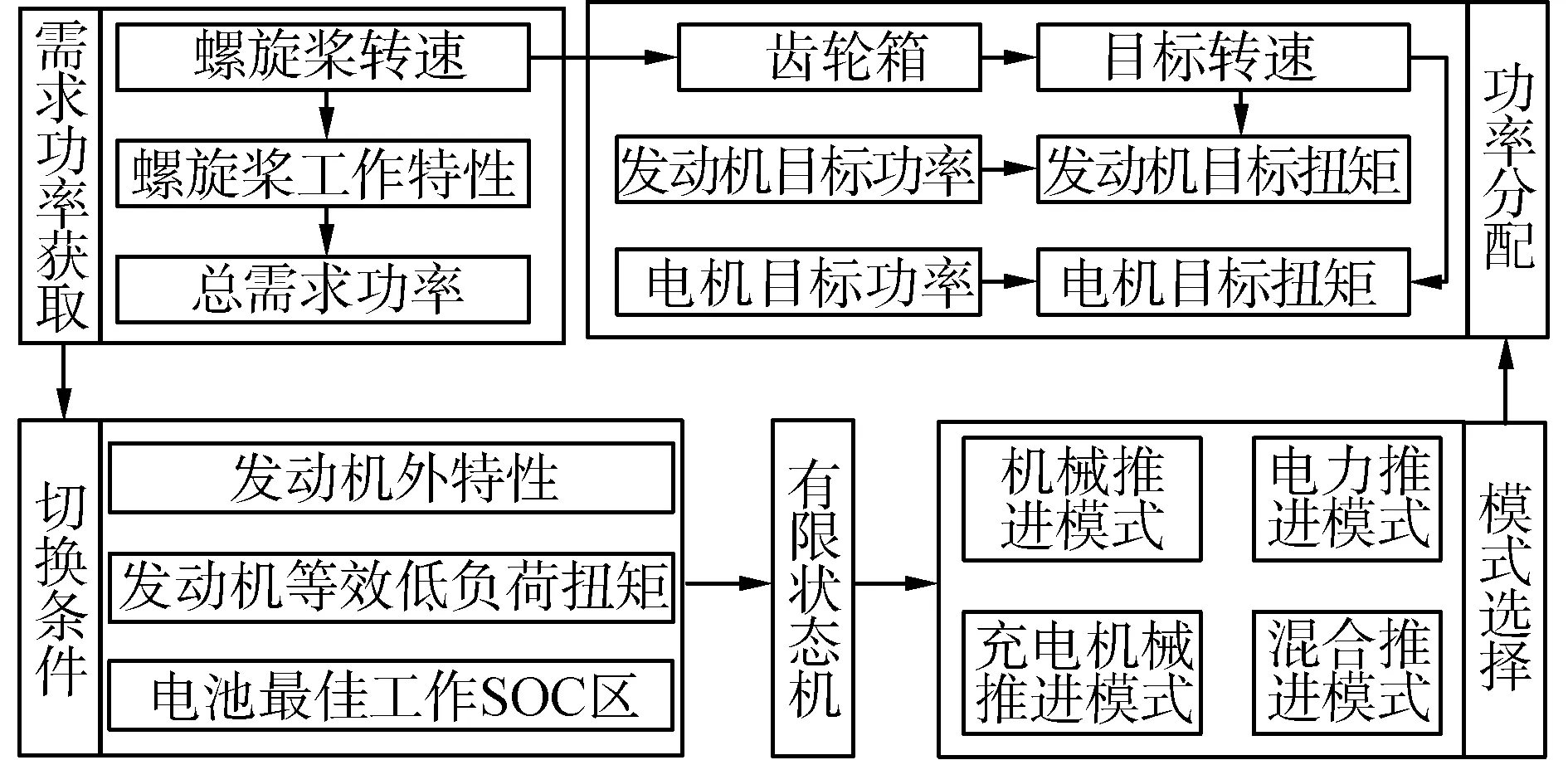
图6 切换控制策略流程
2.4 离合器控制
在工作模式发生变化时,涉及到动力源加入和退出,此时需要离合器居中调度。不同工作模式下离合器的工作状态如表3所示。离合器控制策略如图7所示。当离合器主从转速差nΔclt≤5 r/min时认定转速同步成功,接排成功指令发出;当动力源输出扭矩降为50 N·m时,认定满足脱排条件,即可脱排,天然气发动机停机。
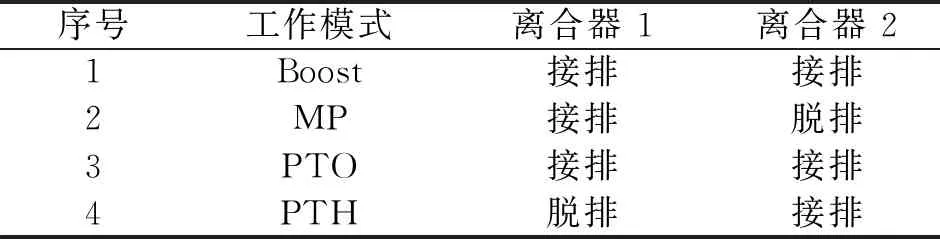
表3 离合器工作状态
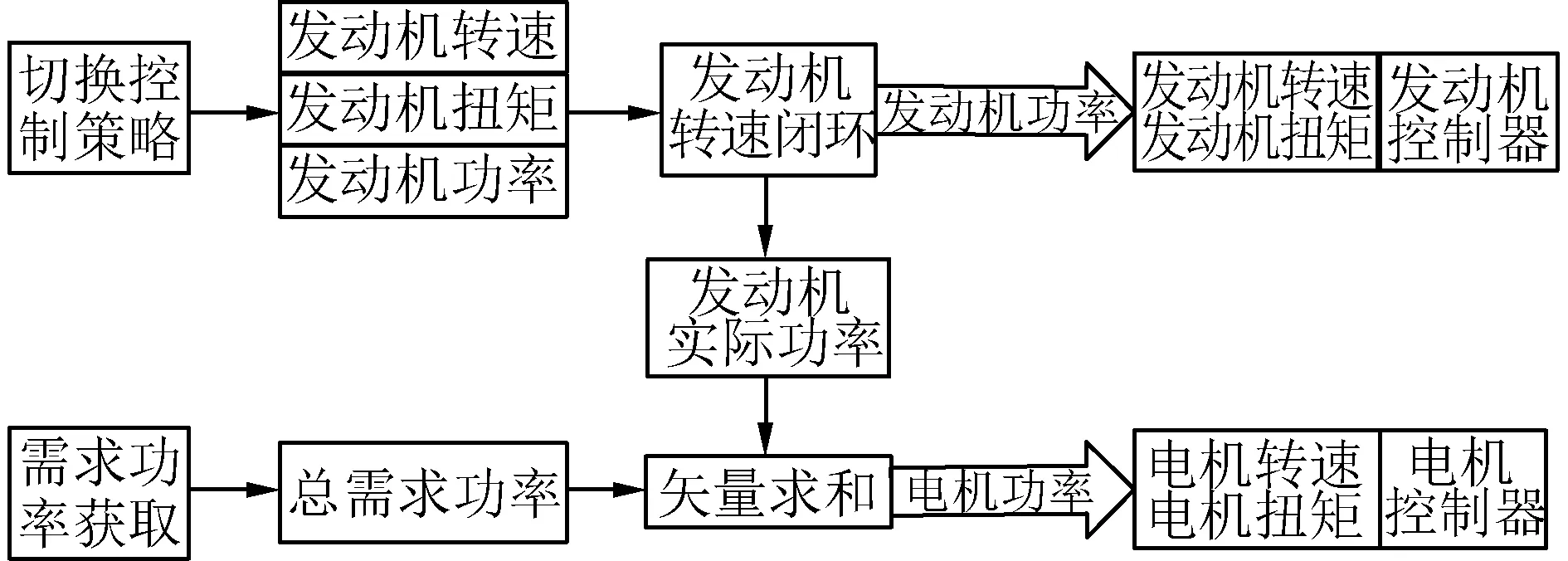
图7 动态协调控制算法控制策略
3 动态协调控制算法
在混合动力系统状态切换过程中,当状态切换前后的天然气发动机和可逆电机目标转速和功率发生了突变,由于2种动力源瞬态响应不同导致超调过大,需要在状态切换过程中通过可逆电机进行动态协调控制。要解决动态协调控制问题,本文从功率入手进行控制;工程上天然气发动机采用转速闭环控制策略,属于被动输出功率,在混合动力系统中调节天然气输出功率是通过可逆电机来完成,故可逆电机采用的是功率/扭矩闭环控制[22];当天然气发动机/电机输出的功率与目标功率的相差较大时,对电机的功率输出进行协调分配,使输出功率保持较稳定的状态,从而完成从当前模式向目标模式的平稳过渡,故可逆电机目标输出功率为:
Pm-target=Preq-Pe+Pm-ch
(6)
式中Pm-target为电动机目标功率;Pe为发动机实际输出功率;Preq为需求功率;Pm-ch为充电需求功率。
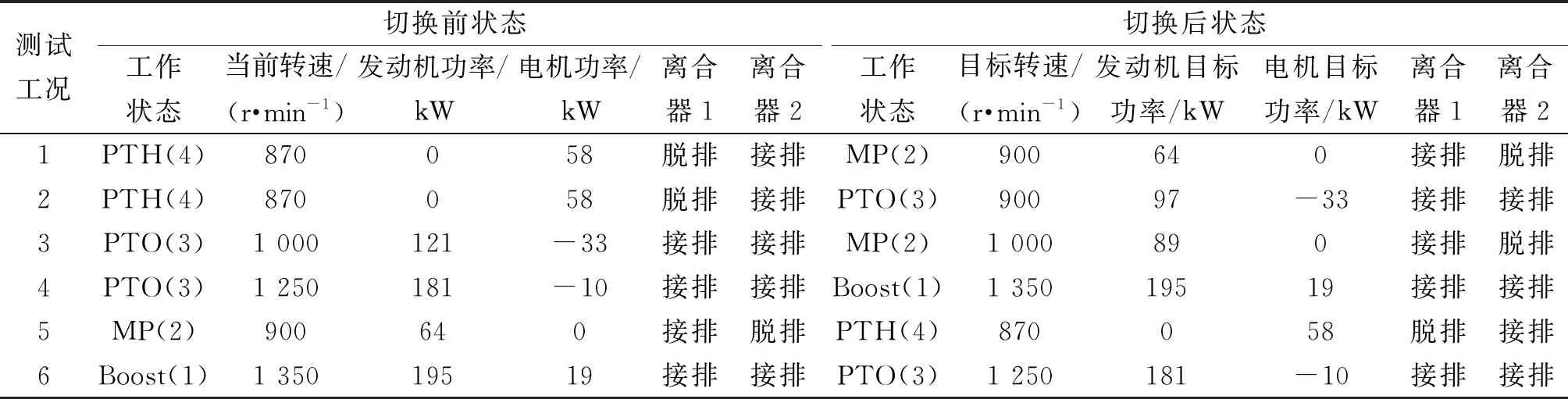
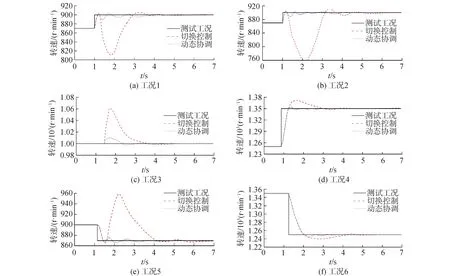
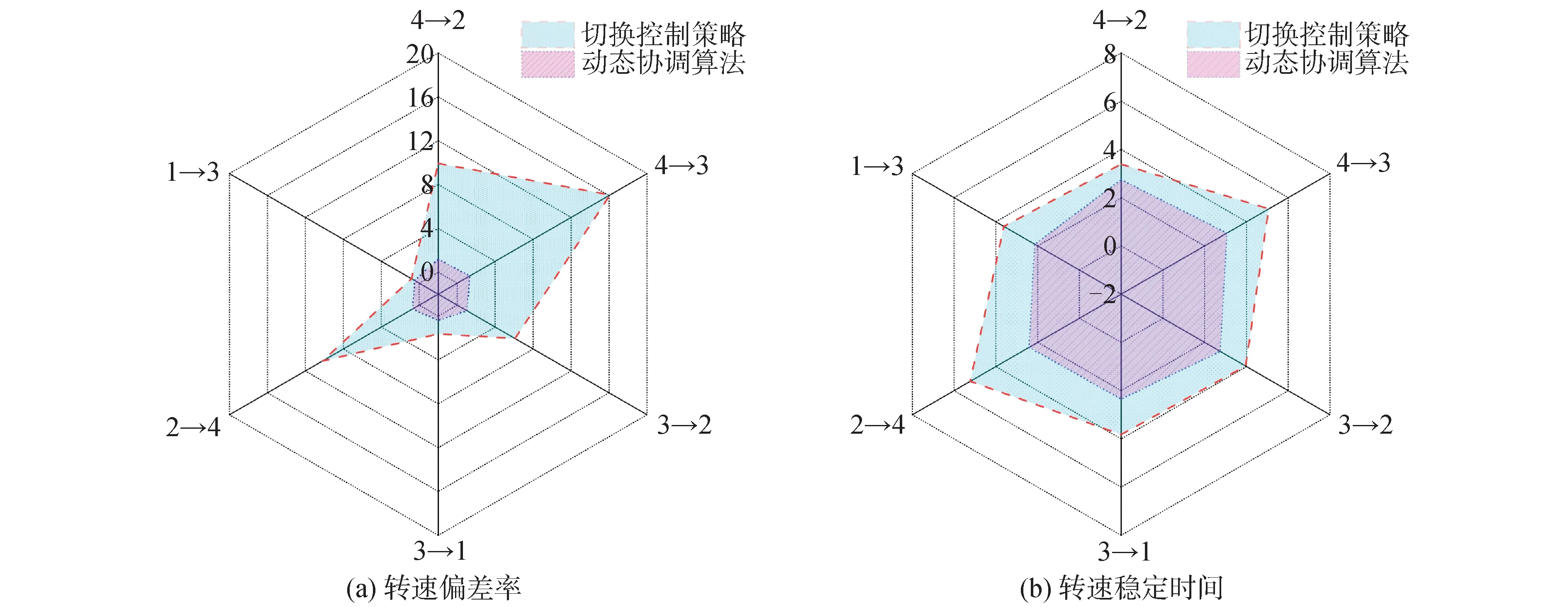
模式1~6的定义和约束条件见表3。工况1,3,5中,SOC>0.8;工况2,4,6中,0.4 (7) 式中τengine为低通滤波器的时间常数,在总需求功率的基础上,经过矢量求和的方式来求取电机功率,通过功率/扭矩闭环方式进行动态协调。 为了研究混合动力系统特性以及验证状态切换时的切换控制策略和动态协调策略,设计如表4所示的测试工况来进行验证。 表4 模式状态切换试验方案 观察图8可以得知,切换控制策略导致天然气发动机转速超调严重,转速偏差率最高可达16.11%(工况2),是因为切换控制策略在离合器接排/脱排直接把目标功率加载到天然气发动机上,其天然气管路的滞后性导致了转速波动幅度较大;工况4和工况6结果表明PTO与Boost之间相互切换切换控制策略的转速超调最低,也是由于两模式切换时离合器不需要相应的调节,而动态协调算法可以转速偏差稳定到12%以内且稳定时间能维持在3 s以内。为了更加直观的反映2种方式性能和鲁棒性,采用雷达图对天然气发动机转速变化率和转速稳定时间参数进行对比分析,选取这2参数的原因是因为船舶动力系统以转速闭环控制进行设计,转速达到预定值可说明船舶阻力与输出功率达到平衡。雷达图中所围成的面积越小代表性能越好,如图9所示。通过工况6中测试工况包围的面积可知动态协调算法的整体性能优于切换控制策略。 图8 测试工况转速变化曲线 图9 2种策略性能对比 1) 基于规则控制策略可以良好地改善天然气发动机运行工况,但是在模式切换过程中由于功率突变导致转速的较大波动,调速性能较差;提出的动态协调控制算法可解决上述问题。 2) 加入动态协调算法以后,发动机转速在切换过程中表现得过度很平稳,整体功率波动较低。通过本文使得混合动力系统在模式切换过程中充分发挥可逆电机动态响应快的优势,加入动态协调算法可以加速转速稳定,验证了算法的有效性和可靠性。4 模式切换试验结果分析与对比
5 结论
